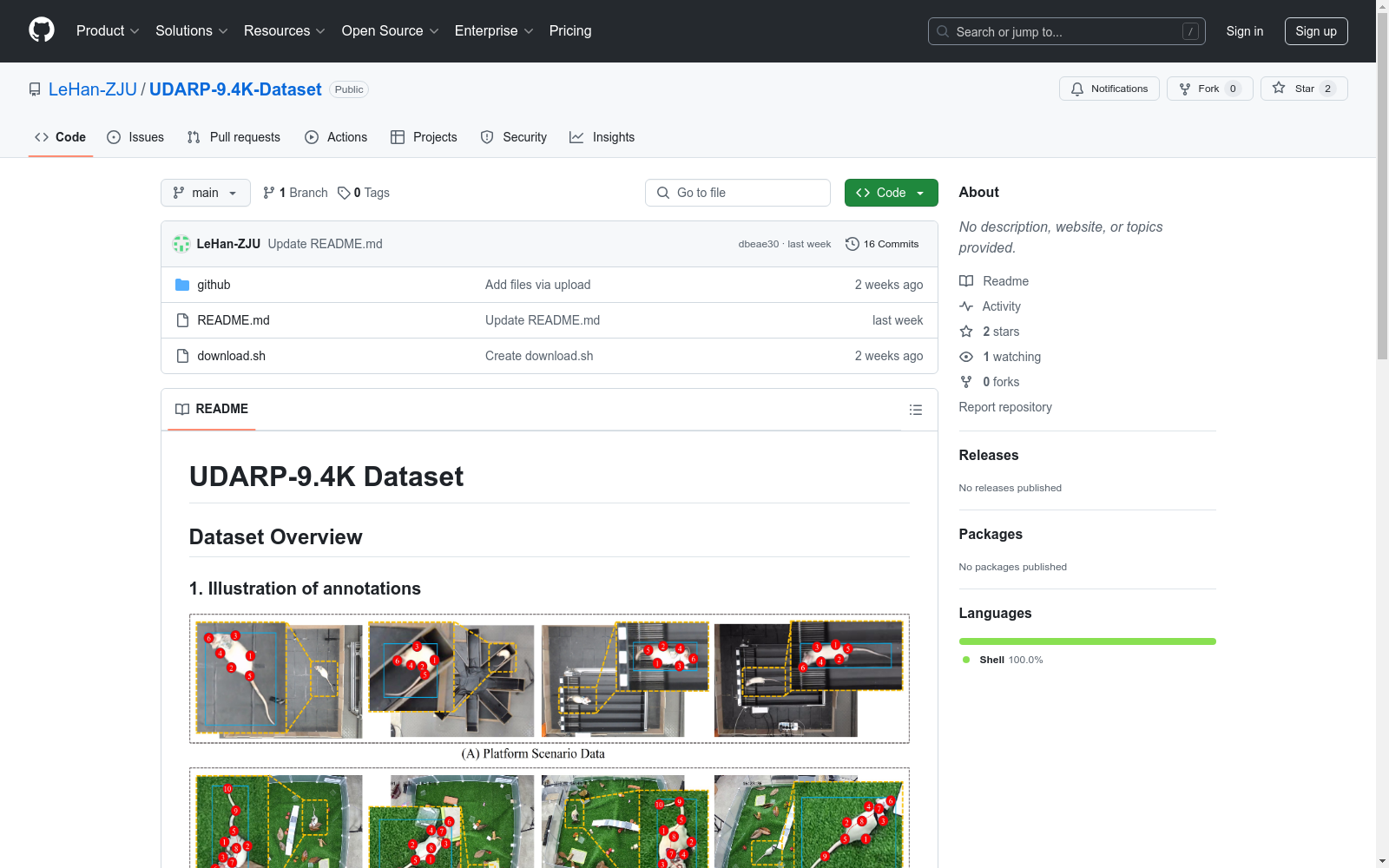
UDARP-9.4K Dataset
收藏github2025-04-05 更新2025-04-15 收录
下载链接:
https://github.com/LeHan-ZJU/UDARP-9.4K-Dataset
下载链接
链接失效反馈官方服务:
资源简介:
UDARP-9.4K数据集是一个关于动物姿势估计的数据集,包含多个场景下的图像和标注信息。数据集分为草坪场景和平台场景,每个场景下有不同的子场景和对应的CSV文件。数据集遵循CC-BY-4.0许可证。
The UDARP-9.4K dataset is a specialized dataset for animal pose estimation, containing images and corresponding annotation information across multiple scenarios. It is divided into two main scenarios: lawn and platform, each with distinct sub-scenarios and associated CSV files. The dataset is released under the CC-BY-4.0 license.
创建时间:
2025-03-31
原始信息汇总
UDARP-9.4K 数据集概述
数据集简介
- 名称:UDARP-9.4K Dataset
- 内容:包含大鼠关键点标注的数据集,用于动物姿态估计研究。
关键点定义
| 关键点编号 | 定义 | 关键点编号 | 定义 |
|---|---|---|---|
| 1 | 右后肢 | 6 | 头部 |
| 2 | 左后肢 | 7 | 颈部 |
| 3 | 右前肢 | 8 | 脊柱中点 |
| 4 | 左前肢 | 9 | 尾巴中点 |
| 5 | 尾巴根部 | 10 | 尾巴端点 |
数据集结构
text UDARP-9.4K Dataset |── UDARP-9.4K │── Lawn scenarios │-- Tilt_Indoor │ │-- 4_train_1_0.jpg │ │-- ... │-- Vertical_Indoor │ │-- 4_0.jpg │ │-- ... │-- Lawn_scenarios.csv │── Platform scenarios │-- maze │ │-- 1 .bmp │ │-- ... │-- minefield │ │-- 1.bmp │ │-- ... │-- treadmill2 │ │-- treadmill1_0.jpg │ │-- ... │-- ... │-- Platform_scenarios.csv
许可信息
- 许可证:CC-BY-4.0
引用信息
text @article{han2025cross, title={Cross-Domain Animal Pose Estimation with Skeleton Anomaly-Aware Learning}, author={Han, Le and Chen, Kaixuan and Zhao, Lei and Jiang, Yangbo and Wang, Pengfei and Zheng, Nenggan}, journal={IEEE Transactions on Circuits and Systems for Video Technology}, year={2025}, publisher={IEEE} doi={10.1109/TCSVT.2025.3557844} }
搜集汇总
数据集介绍
构建方式
UDARP-9.4K数据集通过精心设计的实验场景和标准化标注流程构建而成,涵盖了草坪和平台两大实验场景。研究团队在室内倾斜、垂直环境以及迷宫、雷区、跑步机等多种平台场景下采集了大鼠行为图像,采用专业标注工具对大鼠10个关键解剖点(包括四肢、头颈、脊柱及尾部特征点)进行精确标注,最终形成包含9400张样本的跨域动物姿态估计数据集。数据采集过程严格控制光照、角度等变量,确保样本的多样性和标注的一致性。
特点
该数据集以其跨场景的多样性和精细的解剖标注著称,包含草坪和平台两大类别下的12个子场景,覆盖了大鼠在复杂环境中的各种行为姿态。每个样本均标注了10个关键解剖点,包括四肢关节、头部、脊柱中点和尾部特征点,为研究动物运动学提供了丰富的空间信息。数据集的独特价值在于其包含的异常姿态样本,这些样本对于开发具有鲁棒性的跨域姿态估计算法具有重要意义。不同场景间的域差异也为迁移学习研究提供了理想的数据基础。
使用方法
使用UDARP-9.4K数据集时,建议按照官方划分的草坪和平台两大场景分别进行模型训练和测试。数据集配套的CSV文件详细记录了每个样本的路径和标注信息,可直接用于深度学习框架的数据加载。研究人员可采用该数据集进行跨域动物姿态估计模型的开发,特别关注不同场景间的域适应问题。数据集中包含的异常姿态样本可用于算法鲁棒性测试,而丰富的场景变化则为评估模型泛化能力提供了天然测试环境。使用时应遵守CC-BY-4.0许可协议,并引用相关论文以尊重知识产权。
背景与挑战
背景概述
UDARP-9.4K数据集是由IEEE Transactions on Circuits and Systems for Video Technology于2025年发布的一项专注于跨域动物姿态估计的研究成果,主要研究人员包括Han Le、Chen Kaixuan等学者。该数据集以大鼠为研究对象,通过标注10个关键点(如前后肢、头部、脊柱中点等),旨在解决动物行为分析中的姿态估计问题。数据集包含草坪场景和平台场景两大类,涵盖倾斜室内、垂直室内、迷宫、雷区等多种环境,为研究跨域场景下的动物姿态估计提供了丰富的数据支持。其创新性在于引入了骨骼异常感知学习机制,推动了计算机视觉与动物行为学的交叉研究。
当前挑战
在领域问题层面,UDARP-9.4K数据集面临的挑战包括动物姿态的多样性与复杂性,尤其是大鼠在跨域场景(如迷宫与跑步机)中肢体运动的非刚性变形问题,以及尾部等细长部位的关键点精确定位。构建过程中的挑战主要体现在多场景数据采集的协调性,需保证不同光照条件(如室内倾斜与垂直环境)下标注一致性;同时,针对大鼠快速运动造成的运动模糊,需设计专门的图像采集与标注规范。此外,跨域场景的语义差异要求标注系统具备强泛化能力,这对关键点定义与数据平衡性提出了更高要求。
常用场景
经典使用场景
在动物行为学研究领域,UDARP-9.4K数据集为跨域姿态估计提供了标准化基准。该数据集通过标注大鼠在草坪和平台两种场景下的10个关键解剖点,支持研究者分析不同环境对啮齿类动物运动模式的影响。实验室常利用该数据集验证新型卷积神经网络在复杂背景下的关键点检测精度,特别是在处理动物肢体遮挡和动态模糊等挑战性情况时表现出色。
解决学术问题
该数据集有效解决了动物姿态估计中的领域适应性问题,其多场景设计填补了跨环境动物运动分析的数据空白。通过包含倾斜室内、垂直室内、迷宫等多样化场景,研究者能够系统评估算法在光照变化、视角差异等条件下的鲁棒性。IEEE Transactions文献表明,该数据集支撑的异常感知学习方法显著提升了跨域姿态估计的准确率。
衍生相关工作
基于该数据集衍生的研究推动了三维动物姿态重建技术的发展,如IEEE期刊报道的骨骼异常感知学习框架。后续工作扩展了其在多动物交互场景中的应用,开发出能够区分社会行为的双流网络架构。部分团队进一步构建了包含17个关键点的增强版本,为计算神经科学提供了更精细的分析工具。
以上内容由遇见数据集搜集并总结生成


