FusionPortable Dataset, Geode Dataset, NCD Dataset
收藏github2025-03-07 更新2025-03-11 收录
下载链接:
https://github.com/ljy-zju/lhmm
下载链接
链接失效反馈官方服务:
资源简介:
FusionPortable Dataset是包含建筑白天的数据集,Geode Dataset是包含楼梯的数据集,NCD Dataset是包含校园环境的数据集。
The FusionPortable Dataset contains daytime building scenes. The Geode Dataset features staircases. The NCD Dataset covers campus environments.
创建时间:
2025-03-02
原始信息汇总
LHMM 数据集概述
数据集简介
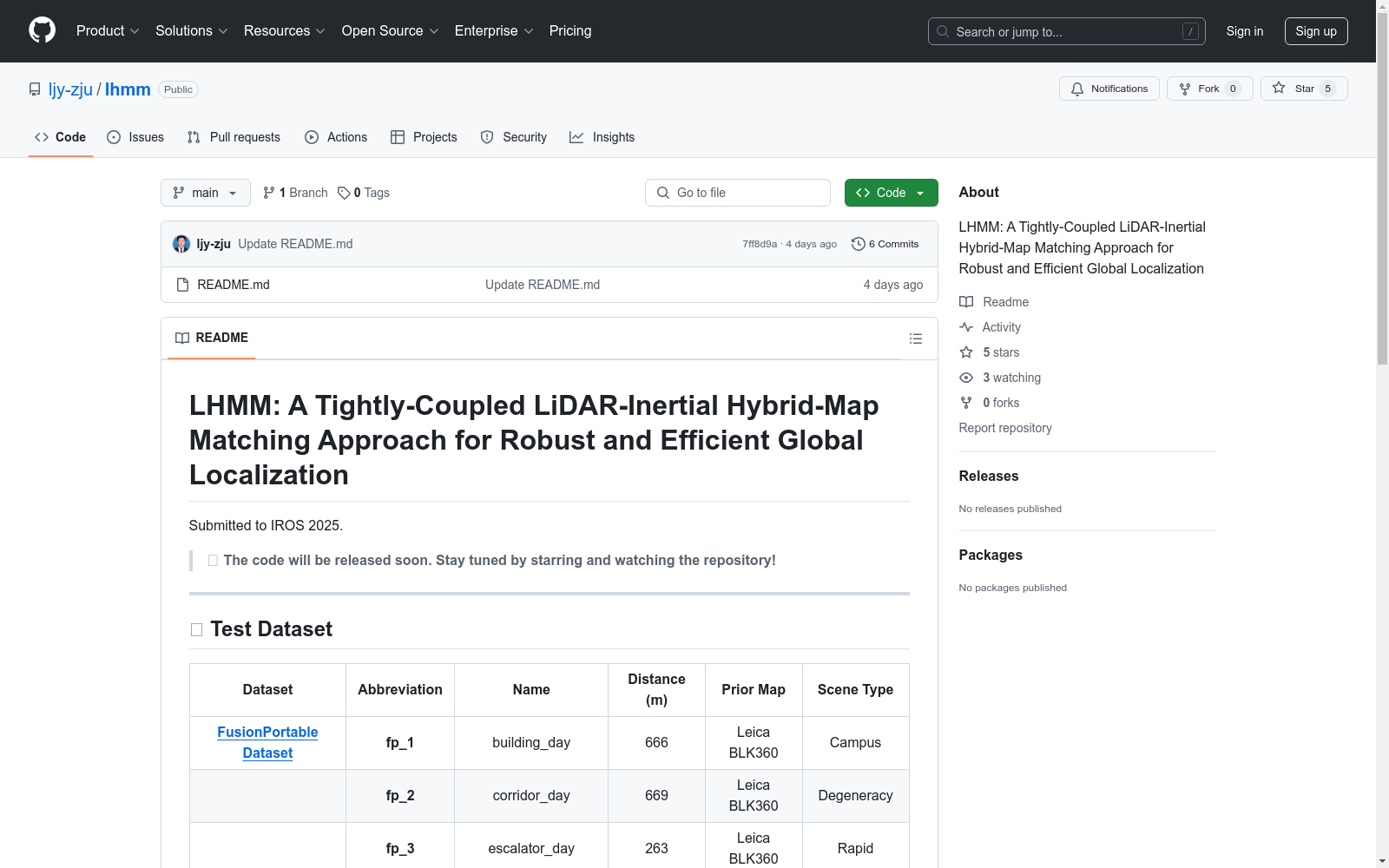
LHMM 是一种紧密结合的激光雷达-惯性混合地图匹配方法,用于稳健和高效的全球定位,已提交至 IROS 2025。
测试数据集
| 数据集 | 缩写 | 名称 | 距离 (m) | 先验地图 | 场景类型 |
|---|---|---|---|---|---|
| FusionPortable Dataset | fp_1 | building_day | 666 | Leica BLK360 | Campus |
| FusionPortable Dataset | fp_2 | corridor_day | 669 | Leica BLK360 | Degeneracy |
| FusionPortable Dataset | fp_3 | escalator_day | 263 | Leica BLK360 | Rapid |
| FusionPortable Dataset | fp_4f | MCR_fast_01 | 90 | Leica BLK360 | Rapid |
| FusionPortable Dataset | fp_4n | MCR_normal_00 | 48 | Leica BLK360 | Rapid |
| FusionPortable Dataset | fp_5d | canteen_day | 250 | Leica BLK360 | Scene change |
| FusionPortable Dataset | fp_5n | canteen_night | 270 | Leica BLK360 | Scene change |
| Geode Dataset | geode_1 | stairs_β | 902 | Leica RTC360 | Degeneracy |
| NCD Dataset | ncd_1 | 01_short_experiment | 1610 | Leica BLK360 | Campus |
| NCD Dataset | ncd_2 | 02_long_experiment | 3060 | Leica BLK360 | Campus |
搜集汇总
数据集介绍
构建方式
FusionPortable Dataset、Geode Dataset与NCD Dataset三个数据集的构建,均采用实际场景下的LiDAR与IMU传感器数据,结合Leica BLK360与Leica RTC360等设备进行数据的采集。数据集涵盖了校园、楼梯、走廊、自动扶梯、食堂等多种场景类型,以及不同的时间光照条件,如白天与夜晚。通过严谨的数据采集流程与丰富的场景覆盖,为全局定位算法的研究提供了可靠的数据基础。
使用方法
用户可以使用GitHub提供的链接访问数据集,并根据项目提供的安装指南进行环境配置与数据集的使用。在获取数据后,用户可以根据自己的研究需求,对数据集进行相应的处理与分析。此外,项目还提供了演示视频,用户可以通过观看视频来更直观地理解数据集的特点与使用方法。
背景与挑战
背景概述
FusionPortable Dataset、Geode Dataset和NCD Dataset是用于研究和评估LiDAR-Inertial混合地图匹配算法的数据集。这些数据集的创建旨在推动机器人全局定位技术的发展,特别是在复杂和多变的环境中。由相关研究人员和机构在近年来创建,它们提供了丰富的场景类型和距离数据,包括校园、楼梯、走廊、自动扶梯以及餐厅等不同环境。这些数据集不仅为研究社区提供了宝贵的资源,也极大地推动了全局定位领域的技术进步和创新发展。
当前挑战
这些数据集所面临的挑战主要涉及两个方面:一是解决领域问题的挑战,例如在全局定位中如何利用混合地图匹配算法准确快速地确定机器人的位置;二是构建过程中的挑战,包括数据收集、处理和标注的准确性,以及如何确保数据集的多样性和代表性,从而使得算法能够在各种环境下均能表现良好。此外,数据集的可用性和兼容性问题,如不同LiDAR设备的支持,也是构建过程中需要考虑的关键挑战。
常用场景
经典使用场景
在机器人全局定位与地图匹配领域,FusionPortable Dataset、Geode Dataset与NCD Dataset被广泛应用于评估与验证LiDAR-Inertial传感器融合定位算法的性能。这些数据集提供了丰富的场景类型,包括校园、走廊、自动扶梯、餐厅等,使得研究者在模拟真实世界环境时,能够全面测试其算法在复杂场景下的鲁棒性与效率。
解决学术问题
这些数据集解决了全局定位中的关键问题,如地图匹配的准确性、场景变化时的稳定性以及退化场景下的定位鲁棒性。通过提供具有挑战性的测试场景,它们帮助研究者们识别并克服了算法在真实世界应用中的局限性,促进了定位算法的进步与优化。
实际应用
在实际应用中,这些数据集对于开发自动驾驶车辆、无人配送机器人以及室内外定位系统等领域的定位算法至关重要。它们为算法的开发、测试与优化提供了实验基础,确保了定位系统在实际环境中的准确性和可靠性。
数据集最近研究
最新研究方向
FusionPortable Dataset、Geode Dataset及NCD Dataset作为测试数据集,被用于评估一种紧密结合的激光雷达-惯性混合地图匹配方法LHMM。该方法旨在为全局定位提供稳健且高效的解决方案。这些数据集覆盖了不同的场景类型,如校园、退化环境和场景变化等,为研究提供了丰富的实验基础。当前研究方向的焦点在于提升地图匹配的准确性和实时性,特别是在具有挑战性的场景下,对定位性能的比较和优化,这对自动驾驶和机器人导航领域具有重要意义。
以上内容由遇见数据集搜集并总结生成


