RADIal
收藏github2021-12-10 更新2024-05-31 收录
下载链接:
https://github.com/julienRebut/RADIal
下载链接
链接失效反馈官方服务:
资源简介:
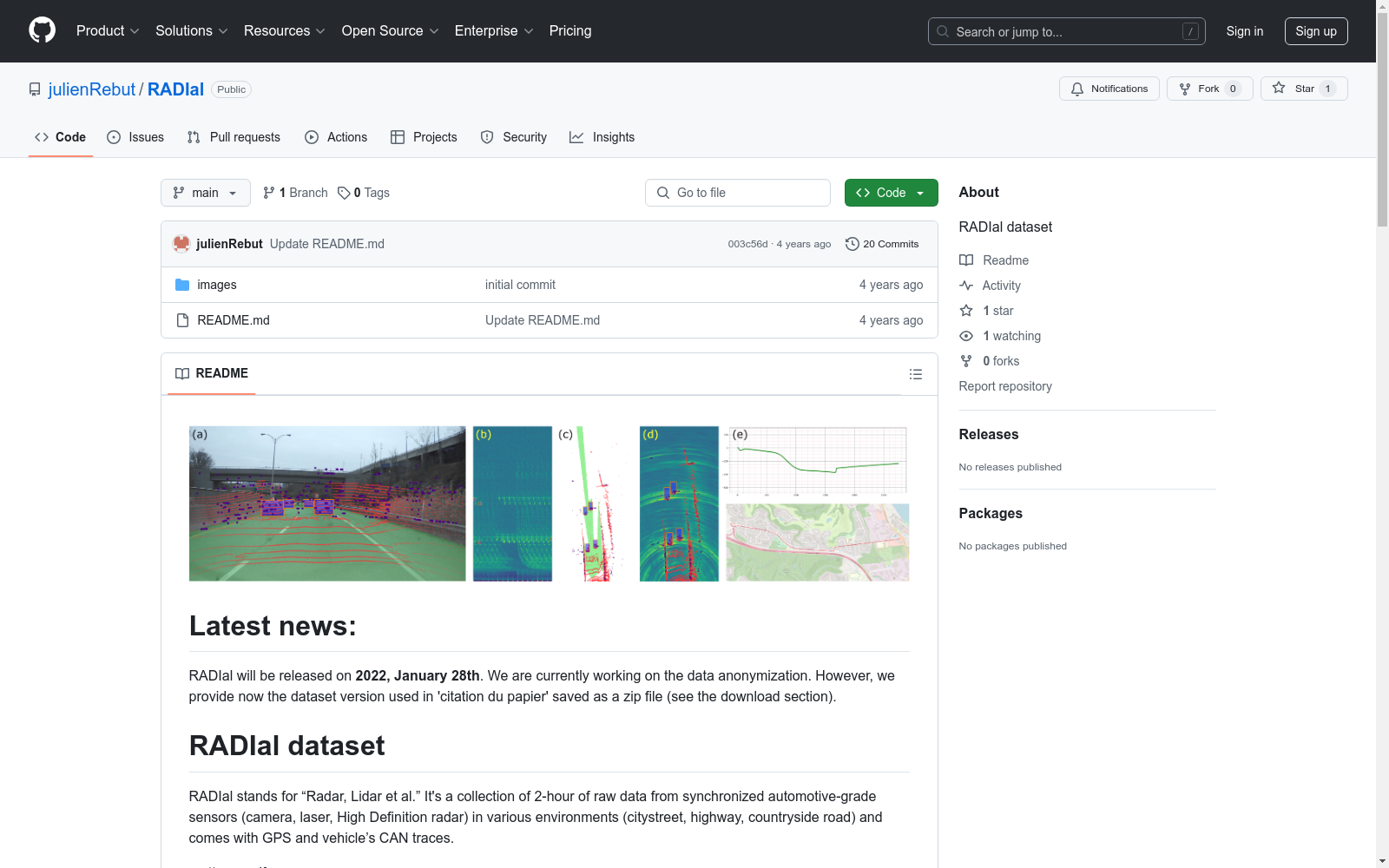
RADIal是一个包含2小时原始数据的集合,来自同步的汽车级传感器(摄像头、激光、高清雷达),涵盖多种环境(城市街道、高速公路、乡村道路),并附带GPS和车辆CAN跟踪信息。数据集包含91个时长1至4分钟的序列,总计2小时,分为高速公路、乡村和城市驾驶。每个序列包含原始传感器信号,记录时保持其本机帧率,约有25,000帧,其中8,252帧标记了9,550辆车。
RADIal is a collection comprising 2 hours of raw data from synchronized automotive-grade sensors (camera, LiDAR, high-definition radar), covering various environments (urban streets, highways, rural roads), and accompanied by GPS and vehicle CAN tracking information. The dataset includes 91 sequences, each lasting from 1 to 4 minutes, totaling 2 hours, and is divided into highway, rural, and urban driving scenarios. Each sequence contains raw sensor signals recorded at their native frame rates, with approximately 25,000 frames, of which 8,252 frames are annotated with 9,550 vehicles.
创建时间:
2021-12-09
原始信息汇总
RADIal 数据集概述
数据集描述
RADIal(Radar, Lidar et al.)是一个包含2小时同步汽车级传感器(摄像头、激光雷达、高清雷达)原始数据的数据集,涵盖城市街道、高速公路和乡村道路等多种环境,并附带GPS和车辆CAN跟踪数据。
数据集内容
- 序列数量与时长:包含91个序列,每个序列时长为1至4分钟,总计2小时。
- 序列分类:分为高速公路、乡村道路和城市驾驶三种类型。
- 传感器数据:
- 高清雷达:由16个接收天线和12个发射天线组成,共192个虚拟天线。
- 激光扫描器:16层汽车级激光扫描器。
- 摄像头:5 Mpix RGB摄像头,安装在车内后视镜下方。
- GPS和CAN跟踪:提供车辆的经纬度位置及驾驶信息如速度、转向角度和偏航率。
- 数据格式:
- 摄像头数据:MJPEG格式。
- 激光扫描器数据:二进制文件。
- 雷达数据:二进制文件,共4个文件,每个文件对应一个雷达芯片。
- GPS数据:ASCII格式。
- CAN跟踪数据:二进制格式。
标签信息
- 标签数量:在25,000个同步帧中,有8,252帧被标记。
- 标签内容:
- 车辆标签:存储在单独的csv文件中,包含车辆的2D和3D坐标、雷达坐标系统中的2D坐标、多普勒值和反射信号功率等。
- 自由驾驶空间标签:以png文件形式的分割掩码提供。
数据集结构
每个序列包含以下内容:
- 场景预览视频(低分辨率)。
- 摄像头数据。
- 激光扫描器点云数据。
- 雷达数据。
- GPS数据。
- CAN跟踪数据。
- 日志文件,提供每个传感器事件的时间戳。
下载信息
数据集可通过以下命令下载:
$ wget https://www.dropbox.com/s/ubbwvdyskrkv7dn/RADIal_extract.zip?dl=0
搜集汇总
数据集介绍
构建方式
RADIal数据集通过集成多种车载传感器(包括摄像头、激光雷达和高清雷达)在多种驾驶环境(如城市街道、高速公路和乡村道路)中采集了2小时的原始数据。数据采集过程中,传感器以同步方式记录,并附带了GPS和车辆CAN总线数据。数据集包含91段1至4分钟不等的序列,总计约25,000帧同步数据,其中8,252帧带有标注,涵盖了9,550辆车辆的信息。
特点
RADIal数据集的特点在于其多模态传感器的同步数据采集,尤其是其高清雷达系统,具备16个接收天线和12个发射天线,形成了192个虚拟天线阵列,提供了高精度的方位角分辨率。此外,数据集还包含了16层激光雷达和5百万像素的RGB摄像头数据,所有传感器的外参均提供,便于数据对齐和分析。数据集还提供了GPS和CAN总线数据,进一步丰富了车辆位置和驾驶状态的信息。
使用方法
RADIal数据集的使用方法包括通过提供的Python库[DBReader](https://pages.github.com/)读取数据,以及使用[HDR_SignalProcessing](https://pages.github.com/)库处理雷达信号,生成功率谱、点云或距离-方位图。数据集的结构为每个序列包含预览视频、摄像头数据、激光雷达点云数据、雷达ADC数据、GPS数据、CAN总线数据以及日志文件。标注信息以CSV文件形式提供,包含车辆的2D和3D坐标、雷达坐标系下的2D坐标、序列名称、帧索引等信息。
背景与挑战
背景概述
RADIal数据集于2022年1月28日正式发布,由多个研究机构联合开发,旨在为自动驾驶领域提供多传感器融合的高质量数据支持。该数据集包含了2小时的原始数据,涵盖了城市街道、高速公路和乡村道路等多种驾驶环境。数据采集使用了高分辨率雷达、激光雷达(LiDAR)和摄像头等多种传感器,并同步记录了GPS和车辆CAN总线信息。RADIal的核心研究问题在于如何通过多模态传感器数据的融合,提升自动驾驶系统在复杂环境下的感知能力。该数据集的发布为自动驾驶领域的研究提供了重要的实验基础,推动了多传感器融合技术的发展。
当前挑战
RADIal数据集在构建和应用中面临多重挑战。首先,多传感器数据的同步与校准是技术难点之一,尤其是雷达信号的复杂性和高分辨率要求使得数据标注和解释变得困难。其次,数据集的标注工作量大且复杂,尤其是车辆的三维坐标和雷达反射信号的精确标注需要高度专业的知识。此外,雷达数据的原始格式(RAW格式)处理难度较大,尽管提供了专门的信号处理工具,但如何高效提取有用信息仍是一个技术瓶颈。最后,数据集的多样性和复杂性对算法的鲁棒性和泛化能力提出了更高要求,尤其是在不同驾驶环境下的表现仍需进一步验证。
常用场景
经典使用场景
RADIal数据集在自动驾驶领域的研究中具有重要地位,其经典使用场景包括多传感器融合算法的开发与验证。通过同步采集的摄像头、激光雷达和高分辨率雷达数据,研究人员能够深入探索复杂交通环境下的目标检测与跟踪问题。该数据集尤其适用于城市街道、高速公路和乡村道路等多样化驾驶场景,为算法提供了丰富的测试环境。
解决学术问题
RADIal数据集解决了自动驾驶研究中多传感器数据融合的难题。通过提供高分辨率雷达、激光雷达和摄像头数据的同步采集,研究人员能够更精确地分析目标检测、环境感知和路径规划等问题。此外,数据集中的GPS和车辆CAN数据为研究车辆动态行为提供了重要支持,推动了自动驾驶技术在复杂环境下的可靠性和安全性研究。
衍生相关工作
RADIal数据集催生了一系列经典研究工作,特别是在多传感器融合和目标检测领域。基于该数据集的研究成果包括高分辨率雷达信号处理算法、激光雷达点云分析技术以及多模态数据融合模型。这些工作不仅推动了自动驾驶技术的发展,还为智能交通系统的优化提供了理论支持。
以上内容由遇见数据集搜集并总结生成


