资源简介:
---
license: mit
pretty_name: garment-tracking
---
# Dataset Card for VR-Folding Dataset
## Table of Contents
- [Table of Contents](#table-of-contents)
- [Dataset Description](#dataset-description)
- [Dataset Summary](#dataset-summary)
- [Dataset Structure](#dataset-structure)
- [Dataset Example](#dataset-example)
## Dataset Description
- **Homepage:** https://garment-tracking.robotflow.ai
- **Repository:** [GitHub](https://github.com/xiaoxiaoxh/GarmentTracking)
- **Paper:** [GarmentTracking: Category-Level Garment Pose Tracking](https://arxiv.org/pdf/2303.13913.pdf)
- **Point of Contact:**
## Dataset Summary

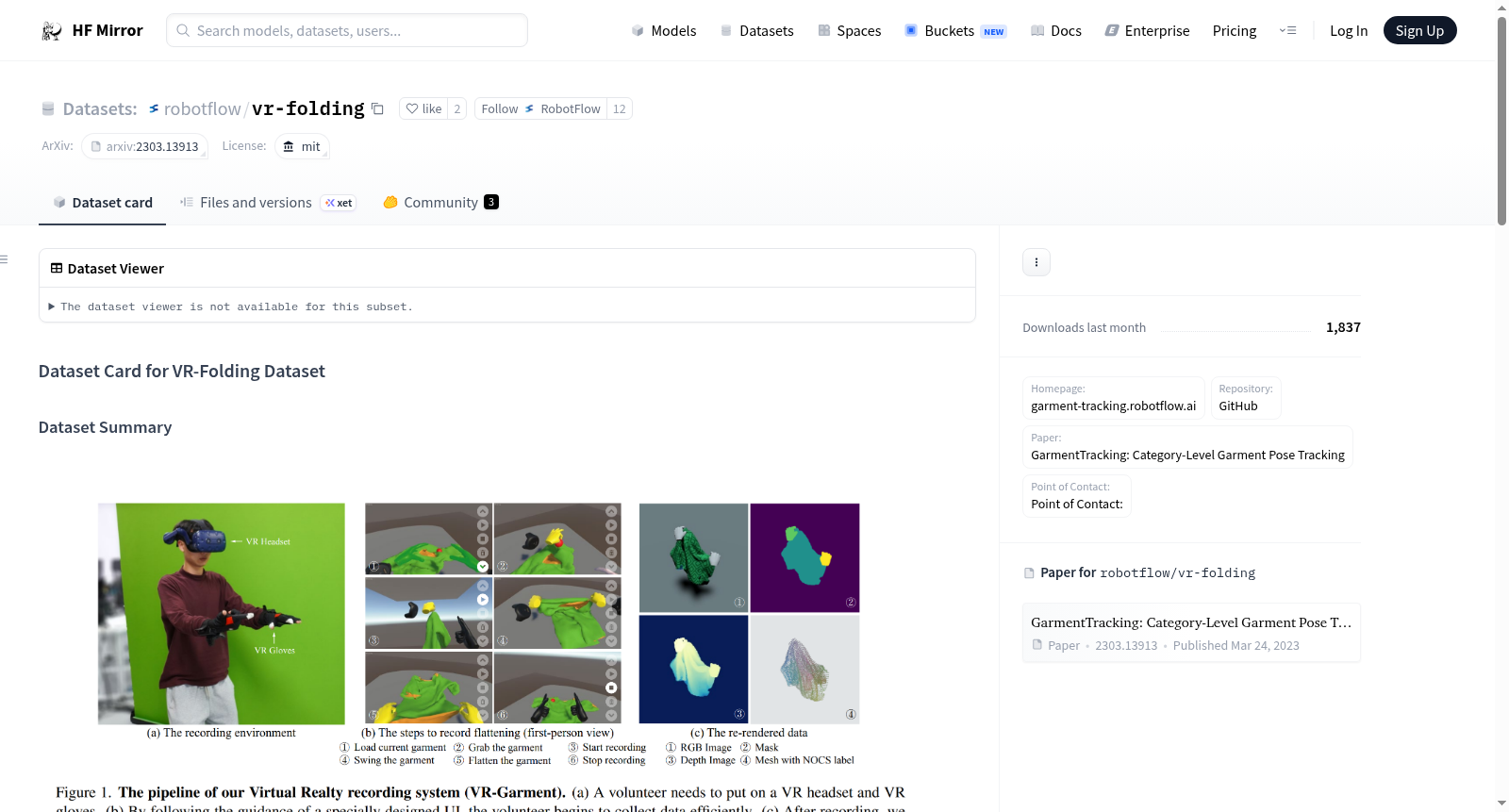
This is the **VR-Folding** dataset created by the CVPR 2023 paper [GarmentTracking: Category-Level Garment Pose Tracking](https://garment-tracking.robotflow.ai).
This dataset is recorded with a system called [VR-Garment](https://github.com/xiaoxiaoxh/VR-Garment), which is a garment-hand interaction environment based on Unity.
To download the dataset, use the following shell snippet:
```
git lfs install
git clone https://huggingface.co/datasets/robotflow/garment-tracking
# if you want to clone without large files – just their pointers
# prepend your git clone with the following env var: GIT_LFS_SKIP_SMUDGE=1
# merge multiple .zip files (e.g. folding) into one .zip file
cd data/folding
cat folding_dataset.z* > folding_dataset.zip
# unzip
unzip folding_dataset.zip
```
All the data are stored in [zarr](https://zarr.readthedocs.io/en/stable/) format.
## Dataset Structure
Here is the detailed stucture of a data example ([zarr](https://zarr.readthedocs.io/en/stable/) format) of one frame:
```
00068_Tshirt_000000_000000
├── grip_vertex_id
│ ├── left_grip_vertex_id (1,) int32
│ └── right_grip_vertex_id (1,) int32
├── hand_pose
│ ├── left_hand_euler (25, 3) float32
│ ├── left_hand_pos (25, 3) float32
│ ├── right_hand_euler (25, 3) float32
│ └── right_hand_pos (25, 3) float32
├── marching_cube_mesh
│ ├── is_vertex_on_surface (6410,) bool
│ ├── marching_cube_faces (12816, 3) int32
│ └── marching_cube_verts (6410, 3) float32
├── mesh
│ ├── cloth_faces_tri (8312, 3) int32
│ ├── cloth_nocs_verts (4434, 3) float32
│ └── cloth_verts (4434, 3) float32
└── point_cloud
├── cls (30000,) uint8
├── nocs (30000, 3) float16
├── point (30000, 3) float16
├── rgb (30000, 3) uint8
└── sizes (4,) int64
```
Specifically, we render 4-view RGB-D images with Unity and generate concated point clouds for each frame. Here `grip_vertex_id` is the vertex index list of the grasped points of the mesh.
# Dataset Example
Please see [example](data/data_examples/README.md) for example data and visualization scripts.
Here are two video examples for flattening and folding task.


---
license: MIT协议
pretty_name: garment-tracking
---
# VR折叠数据集(VR-Folding Dataset)数据集卡片
## 目录
- [目录](#目录)
- [数据集描述](#数据集描述)
- [数据集摘要](#数据集摘要)
- [数据集结构](#数据集结构)
- [数据集示例](#数据集示例)
## 数据集描述
- **主页:** https://garment-tracking.robotflow.ai
- **代码仓库:** [GitHub](https://github.com/xiaoxiaoxh/GarmentTracking)
- **相关论文:** [GarmentTracking:类别级衣物姿态跟踪](https://arxiv.org/pdf/2303.13913.pdf)
- **联系人:**
## 数据集摘要

本数据集为CVPR 2023论文《GarmentTracking:类别级衣物姿态跟踪》所构建的**VR折叠数据集(VR-Folding Dataset)**。本数据集通过名为[VR-Garment](https://github.com/xiaoxiaoxh/VR-Garment)的系统录制采集,该系统是一款基于Unity引擎的衣物-手部交互环境。
若需下载该数据集,请使用如下Shell命令片段:
git lfs install
git clone https://huggingface.co/datasets/robotflow/garment-tracking
# 若仅需克隆大文件的指针而非完整文件
# 在git clone命令前添加如下环境变量:GIT_LFS_SKIP_SMUDGE=1
# 将多个.zip分卷文件(例如folding系列)合并为单个.zip文件
cd data/folding
cat folding_dataset.z* > folding_dataset.zip
# 解压
unzip folding_dataset.zip
所有数据均以[zarr](https://zarr.readthedocs.io/en/stable/)格式存储。
## 数据集结构
以下为单帧数据示例([zarr](https://zarr.readthedocs.io/en/stable/)格式)的详细结构:
00068_Tshirt_000000_000000
├── grip_vertex_id(抓取顶点ID)
│ ├── left_grip_vertex_id (1,) int32
│ └── right_grip_vertex_id (1,) int32
├── hand_pose(手部姿态)
│ ├── left_hand_euler (25, 3) float32
│ ├── left_hand_pos (25, 3) float32
│ ├── right_hand_euler (25, 3) float32
│ └── right_hand_pos (25, 3) float32
├── marching_cube_mesh(移动立方体网格)
│ ├── is_vertex_on_surface (6410,) bool
│ ├── marching_cube_faces (12816, 3) int32
│ └── marching_cube_verts (6410, 3) float32
├── mesh(网格)
│ ├── cloth_faces_tri (8312, 3) int32
│ ├── cloth_nocs_verts (4434, 3) float32(布料归一化物体坐标空间顶点)
│ └── cloth_verts (4434, 3) float32
└── point_cloud(点云)
├── cls (30000,) uint8(类别标签)
├── nocs (30000, 3) float16(归一化物体坐标空间)
├── point (30000, 3) float16
├── rgb (30000, 3) uint8
└── sizes (4,) int64
具体而言,我们通过Unity引擎渲染4视角RGB-D图像,并为每一帧生成拼接后的点云。此处的`grip_vertex_id`(抓取顶点ID)为网格抓取点的顶点索引列表。
## 数据集示例
示例数据与可视化脚本请参见[example](data/data_examples/README.md)。以下为衣物展平与折叠任务的两段视频示例: