legkilo-dataset
收藏github2024-04-24 更新2024-05-31 收录
下载链接:
https://github.com/ouguangjun/legkilo-dataset
下载链接
链接失效反馈官方服务:
资源简介:
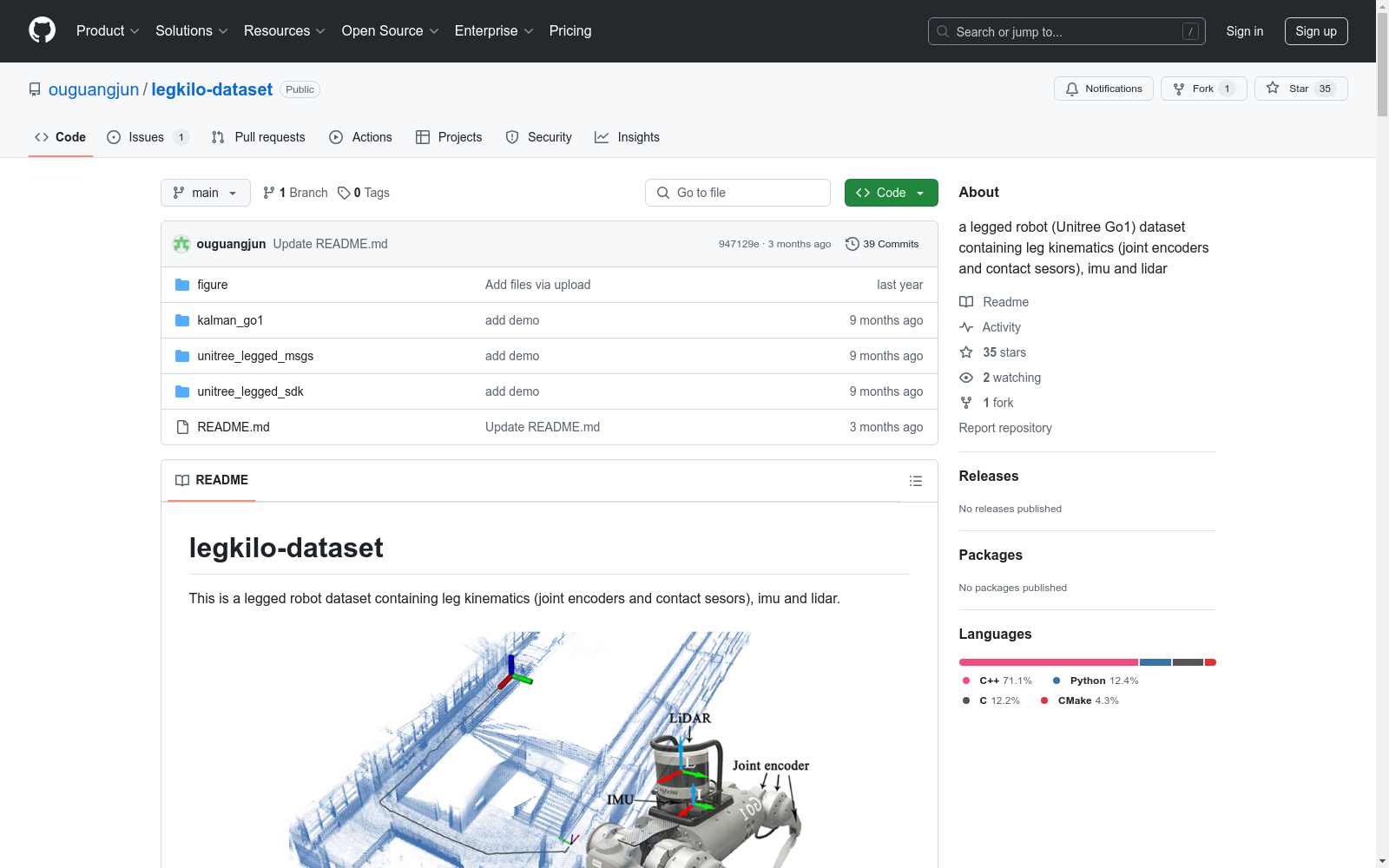
这是一个腿式机器人数据集,包含关节编码器、接触传感器、IMU和激光雷达数据。数据集涵盖了多种环境下的机器人行为,如长走廊、半开放停车场、室内环境、快速短跑和长坡道等。此外,还提供了详细的传感器信息和数据格式。
This is a dataset for legged robots, encompassing data from joint encoders, contact sensors, IMUs (Inertial Measurement Units), and LiDAR (Light Detection and Ranging). The dataset captures the robot's behaviors across various environments, including long corridors, semi-open parking lots, indoor settings, rapid sprints, and long ramps. Additionally, it provides detailed sensor information and data formats.
创建时间:
2023-09-11
原始信息汇总
数据集概述
名称: legkilo-dataset 内容: 该数据集包含一个有腿机器人的数据,包括腿部运动学(关节编码器和接触传感器)、IMU和激光雷达数据。
数据集序列
- corridor: 长走廊,周围是玻璃窗,机器人轨迹呈“8”字形,起点和终点重合。
- park: 半开放停车场,充满车辆,机器人周围有动态物体(如行人)。
- indoor: 静态、非均匀的室内环境。
- running: 机器人以平均速度1.50 m/s快速跑圈。
- slope: 长斜坡,高度变化超过6米,起点和终点重合。
传感器信息
传感器概览
- 频率: IMU和其他运动学测量数据发布频率为500 Hz,但由于机器人制造商提供的SDK限制,更新频率为50 Hz,导致部分数据重叠。
传感器类型
- 包含: 激光雷达、IMU、关节编码器、接触传感器等。
- 示例: 以corridor序列为例,具体数据格式如下:
- 路径: corridor.bag
- 版本: 2.0
- 持续时间: 7分25秒(445秒)
- 开始时间: 2023年9月12日21:05:58.65
- 结束时间: 2023年9月12日21:13:24.57
- 大小: 3.0 GB
- 消息数: 670538
- 压缩: 无
- 类型:
- nav_msgs/Odometry
- sensor_msgs/Imu
- sensor_msgs/PointCloud2
- unitree_legged_msgs/HighState
- 主题:
- /high_state: unitree_legged_msgs/HighState
- /imu_raw: sensor_msgs/Imu
- /points_raw: sensor_msgs/PointCloud2
- /state_SDK: nav_msgs/Odometry
具体传感器数据
- /points_raw: 由velodyne VLP16激光雷达提供的数据,大约10 Hz。
- /high_state: unitree_legged_msgs/HighState,由Unitree提供,包含时间戳、IMU测量、电机状态、电池状态等。
- /imu_raw: 四足机器人内置IMU,提供9轴测量信息(加速度、角速度、四元数)。
- /state_SDK: 由Unitree内置的状态估计器,可能是基于卡尔曼滤波的腿部里程计。
运行环境与方法
- 环境: 测试于Ubuntu 18.04和ROS1。
- 构建与运行:
-
构建:
cd dataset_ws git clone https://github.com/ouguangjun/legkilo-dataset.git mv legkilo-dataset src catkin_make
-
运行:
source devel/setup.bash roslaunch kalman_go1 pubLegKF.launch rosbag play corridor.bag
-
算法建议
- A-LOAM: 建议添加循环闭合检测以提高全局精度。
- LIOSAM: 建议替换IMU里程计为提供的运动学-惯性里程计,并添加腿部里程计因子到因子图。
- FASTLIO 和 Point-lio: 建议调整IMU观测的加速度协方差或激光雷达观测的误差标准差。
搜集汇总
数据集介绍
构建方式
legkilo-dataset数据集通过在多种复杂环境中对四足机器人进行数据采集而构建,涵盖了走廊、停车场、室内、跑步、斜坡、旋转和草地等多种场景。每个场景中,机器人配备了多种传感器,包括IMU、激光雷达、关节编码器和接触传感器,以捕捉动态运动和环境交互的详细数据。数据集的构建过程中,采用了高频率的数据采集技术,确保了数据的精确性和完整性。此外,通过使用先验地图或离线优化方法(如GR-Fusion)获取地面真实值,进一步提升了数据集的质量和可靠性。
使用方法
使用legkilo-dataset数据集时,用户可以通过提供的ROSbag文件获取原始数据,并结合ROS环境进行数据处理和分析。数据集支持多种机器人状态估计和导航算法的开发与测试,如基于激光雷达的LOAM算法、LIOSAM和FASTLIO等。用户可以根据具体需求调整传感器参数和算法设置,以优化算法的性能。此外,数据集还提供了详细的构建和运行指南,帮助用户快速上手并进行有效的实验验证。
背景与挑战
背景概述
legkilo-dataset是由Ou Guangjun、Li Dong和Li Hanmin等研究人员于2024年在IEEE Robotics and Automation Letters上发表的论文《Leg-KILO: Robust Kinematic-Inertial-Lidar Odometry for Dynamic Legged Robots》中提出的数据集。该数据集专注于动态四足机器人的运动学、惯性和激光雷达数据,旨在为机器人导航和状态估计提供丰富的实验数据。通过在多种复杂环境中(如走廊、停车场、室内、草地等)收集的数据,该数据集为研究者提供了一个全面的平台,以验证和改进四足机器人的定位与导航算法。
当前挑战
legkilo-dataset在构建过程中面临了多个挑战。首先,四足机器人在不同地形和环境中的运动特性复杂,导致数据采集和同步的难度增加。其次,传感器数据的高频更新与机器人制造商SDK的限制之间的矛盾,使得数据频率不一致,增加了数据处理的复杂性。此外,如何在动态环境中保持高精度的定位与导航,尤其是在IMU数据不稳定的情况下,是该数据集面临的主要挑战。最后,如何将激光雷达、惯性测量单元和关节编码器的数据有效融合,以提高整体算法的鲁棒性和精度,也是该数据集需要解决的关键问题。
常用场景
经典使用场景
在足式机器人领域,legkilo-dataset 数据集因其丰富的传感器数据和多样化的环境场景而备受瞩目。该数据集包含了足式机器人在不同环境中的运动数据,如走廊、公园、室内、草地等,这些场景涵盖了从静态到动态、从平坦到崎岖的多种地形。通过这些数据,研究人员可以深入分析足式机器人在复杂环境中的运动学和动力学特性,尤其是在动态对象和非结构化环境中的表现。
解决学术问题
legkilo-dataset 数据集为解决足式机器人在复杂环境中的定位与导航问题提供了重要支持。通过结合IMU、激光雷达和关节编码器等多传感器数据,该数据集能够帮助研究人员开发和验证鲁棒的里程计算法,尤其是在动态和非结构化环境中。此外,该数据集还为研究足式机器人的运动学建模、动力学分析以及多传感器融合提供了丰富的实验数据,推动了相关领域的学术研究进展。
实际应用
在实际应用中,legkilo-dataset 数据集为足式机器人在复杂环境中的导航、路径规划和运动控制提供了重要参考。例如,在灾害救援、农业作业和军事侦察等领域,足式机器人需要应对复杂的地形和动态环境。通过利用该数据集,开发者可以优化机器人的运动控制算法,提升其在实际任务中的表现。此外,该数据集还可用于训练和验证基于深度学习的机器人行为预测模型,进一步提高机器人的自主性和适应性。
数据集最近研究
最新研究方向
在机器人学领域,legged robot(腿式机器人)的运动控制与导航技术一直是研究的前沿课题。legkilo-dataset作为这一领域的最新数据集,聚焦于腿式机器人在复杂环境中的运动学、惯性及激光雷达数据,为研究者提供了丰富的实验场景和传感器数据。该数据集的发布与2024年IEEE Robotics and Automation Letters上发表的论文《Leg-KILO: Robust Kinematic-Inertial-Lidar Odometry for Dynamic Legged Robots》紧密相关,展示了如何在动态环境中实现鲁棒的腿式机器人定位与导航。这一研究方向不仅推动了腿式机器人在复杂地形中的应用,还为多传感器融合技术提供了新的实验平台,特别是在IMU、激光雷达和关节编码器的协同工作方面。通过该数据集,研究者可以进一步探索腿式机器人在不同环境下的运动特性,优化其导航算法,从而提升机器人在实际应用中的稳定性和精度。
以上内容由遇见数据集搜集并总结生成


