MITI
收藏MITI数据集概述
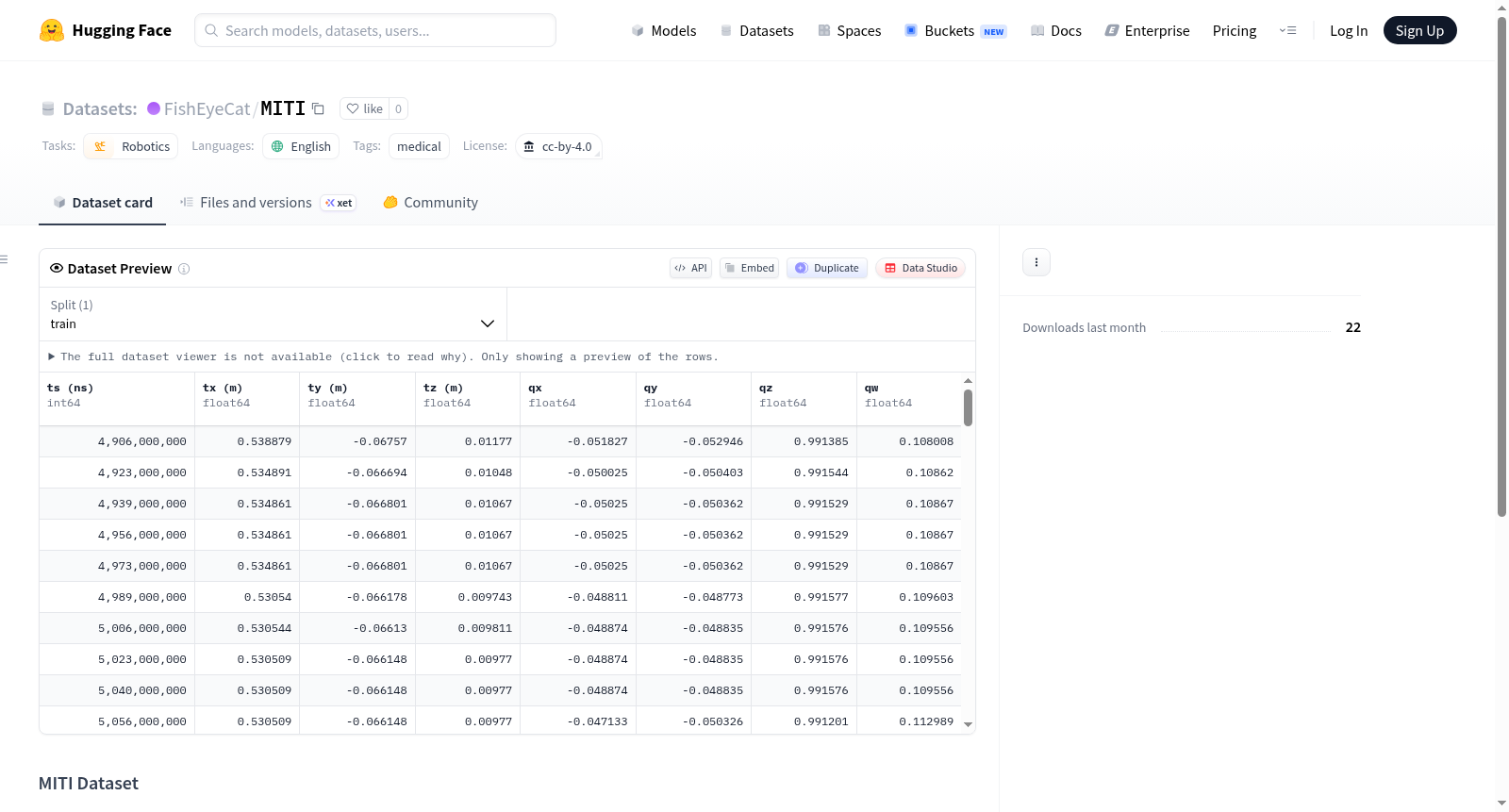
数据集基本信息
- 数据集名称:MITI
- 许可证:cc-by-4.0
- 任务类别:机器人学
- 语言:英语
- 标签:医学
数据集描述
该数据集旨在复现论文《Constrained Visual-Inertial Localization》的工作,以简化其与VSLAM-LAB框架的集成。数据集包含立体图像、IMU传感器数据和红外数据。
相关引用
论文标题:Constrained visual-inertial localization with application and benchmark in laparoscopic surgery 作者:Hartwig, Regine and Ostler, Daniel and Rosenthal, Jean-Claude and Feu{ss}ner, Hubertus and Wilhelm, Dirk and Wollherr, Dirk 会议:2022 International Conference on Robotics and Automation (ICRA) 页码:9513--9520 年份:2022 组织:IEEE
BibTeX引用格式: @inproceedings{hartwig2022constrained, title={Constrained visual-inertial localization with application and benchmark in laparoscopic surgery}, author={Hartwig, Regine and Ostler, Daniel and Rosenthal, Jean-Claude and Feu{ss}ner, Hubertus and Wilhelm, Dirk and Wollherr, Dirk}, booktitle={2022 International Conference on Robotics and Automation (ICRA)}, pages={9513--9520}, year={2022}, organization={IEEE} }