FreeGraspData
收藏arXiv2025-03-17 更新2025-03-19 收录
下载链接:
https://tev-fbk.github.io/FreeGrasp/
下载链接
链接失效反馈官方服务:
资源简介:
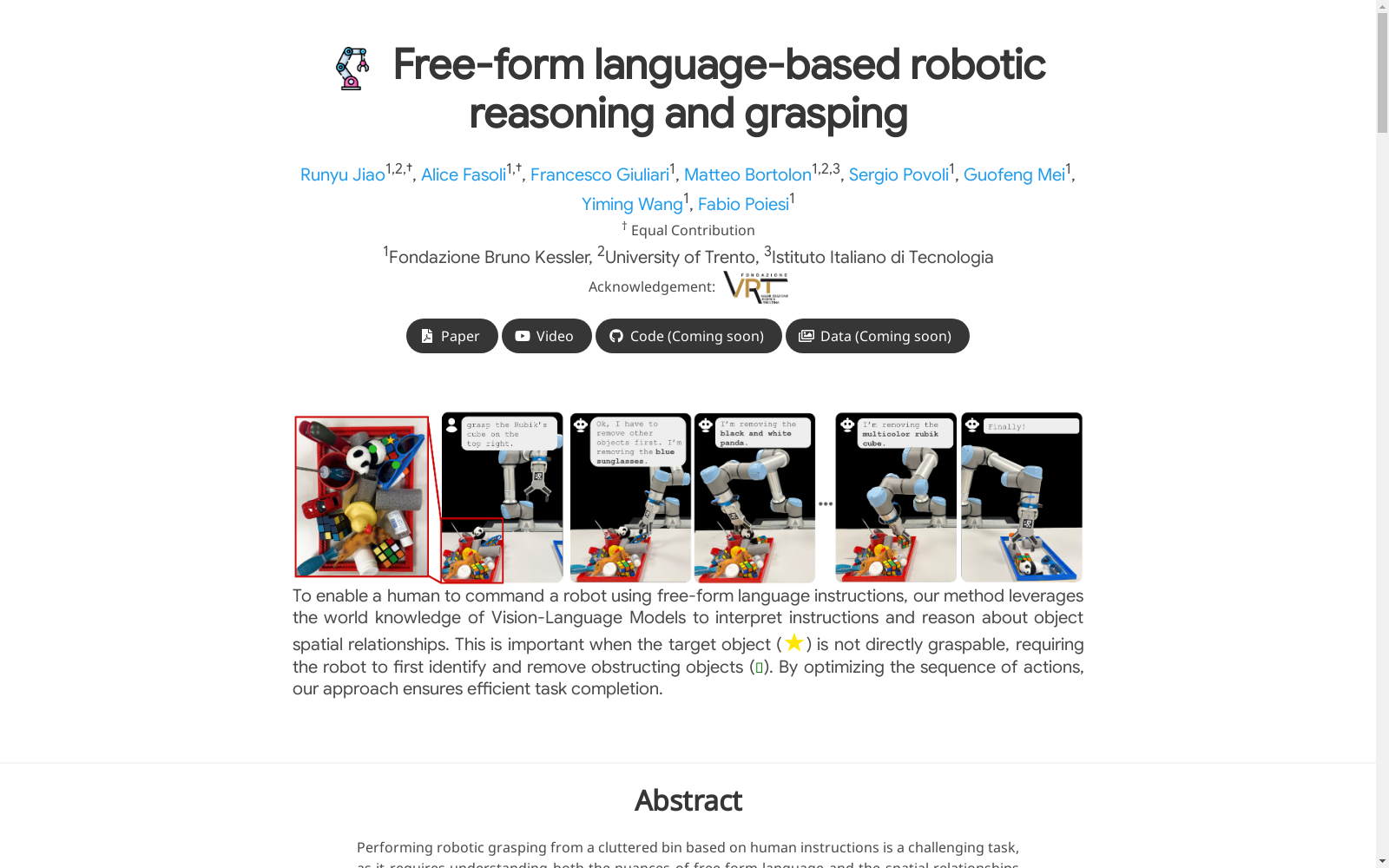
FreeGraspData数据集是在MetaGraspNetV2数据集基础上扩展而来,由Fondazione Bruno Kessler创建。该数据集包含300个场景,每个场景都配有三个人类标注的自然语言指令。数据集旨在评估机器人基于自由形式语言指令进行抓取任务的能力,涵盖了不同难度的任务场景,包括直接抓取和需要先移除障碍物的场景。
The FreeGraspData dataset is an extension of the MetaGraspNetV2 dataset, developed by Fondazione Bruno Kessler. It contains 300 scenes, each paired with three human-annotated natural language instructions. This dataset is designed to evaluate robots' ability to perform grasping tasks guided by free-form natural language instructions, covering task scenarios with varying levels of difficulty, including both direct grasping scenarios and those that require prior removal of obstacles.
提供机构:
Fondazione Bruno Kessler
创建时间:
2025-03-17
搜集汇总
数据集介绍
构建方式
FreeGraspData数据集的构建基于MetaGraspNetV2数据集,通过扩展其内容以适应自由形式语言指令的机器人抓取任务。具体而言,研究团队从MetaGraspNetV2中选择了包含至少四个物体的场景,以确保场景的复杂性。随后,通过人类注释者为每个场景提供了自由形式的语言指令,并基于遮挡图生成了从目标物体到可抓取物体的抓取序列。此外,数据集根据遮挡条件和物体歧义性将任务难度分为‘简单’、‘中等’和‘困难’三个级别,最终形成了包含300个场景的FreeGraspData数据集。
特点
FreeGraspData数据集的特点在于其结合了自由形式语言指令与机器人抓取任务的复杂性。每个场景都包含多个物体,且目标物体可能被其他物体遮挡,要求机器人进行空间推理以确定抓取顺序。数据集还特别考虑了物体歧义性,即场景中可能存在多个相同类别的物体,增加了任务的挑战性。此外,每个场景都提供了三个不同注释者的语言指令,确保了指令的多样性和复杂性,能够有效评估模型在处理自由形式语言和空间推理方面的能力。
使用方法
FreeGraspData数据集主要用于评估机器人抓取任务中自由形式语言指令的理解与执行能力。研究人员可以通过该数据集测试模型在复杂场景下的空间推理能力,特别是如何处理物体遮挡和歧义性问题。具体使用方式包括:输入自由形式语言指令和场景图像,模型需要识别目标物体并生成抓取序列。数据集还支持对不同任务难度级别的性能评估,帮助研究人员分析模型在简单、中等和困难场景下的表现差异。此外,数据集的多注释者设计也为模型的语言理解能力提供了多样化的测试环境。
背景与挑战
背景概述
FreeGraspData数据集由Fondazione Bruno Kessler、特伦托大学和意大利理工学院的研究团队于2025年创建,旨在解决基于自由形式语言的机器人抓取任务中的关键问题。该数据集扩展了MetaGraspNetV2数据集,引入了人类标注的指令和抓取序列,以支持机器人通过视觉-语言模型(VLMs)进行空间推理和任务执行。FreeGraspData的核心研究问题是如何使机器人能够理解复杂的自由形式语言指令,并在杂乱环境中高效地完成抓取任务。该数据集的发布为机器人抓取领域提供了新的基准,推动了视觉-语言模型在机器人控制中的应用。
当前挑战
FreeGraspData面临的挑战主要体现在两个方面。首先,在领域问题方面,机器人需要准确理解自由形式语言指令,并在杂乱环境中进行空间推理,以确定目标物体是否可直接抓取或需先移除障碍物。这一任务对视觉-语言模型的推理能力提出了极高要求,尤其是在处理多实例物体和复杂遮挡关系时。其次,在数据集构建过程中,研究团队需克服标注自由形式语言指令的多样性和复杂性,确保指令的准确性和一致性。此外,如何从现有的MetaGraspNetV2数据集中提取有效的抓取序列并生成合理的任务难度分类,也是构建过程中的一大挑战。
常用场景
经典使用场景
FreeGraspData数据集最经典的使用场景是用于评估和验证基于自由形式语言指令的机器人抓取任务。该数据集通过模拟复杂的抓取场景,帮助研究人员测试机器人系统在理解人类语言指令、进行空间推理以及执行抓取动作时的表现。数据集中的场景设计涵盖了不同的任务难度,包括目标物体是否被遮挡、是否存在多个同类物体等复杂情况,从而为机器人抓取算法的开发提供了丰富的测试环境。
衍生相关工作
FreeGraspData数据集衍生了一系列相关研究工作,主要集中在视觉-语言模型与机器人抓取任务的结合上。例如,ThinkGrasp等研究利用GPT-4o进行抓取推理,进一步优化了机器人在复杂环境中的表现。此外,MetaGraspNetV2等数据集也为机器人抓取任务提供了丰富的场景和物体关系信息,推动了抓取算法的多样化发展。这些工作不仅扩展了FreeGraspData的应用范围,还为机器人抓取技术的未来发展奠定了基础。
数据集最近研究
最新研究方向
近年来,FreeGraspData数据集在机器人抓取领域的研究方向主要集中在结合视觉-语言模型(VLMs)的自由形式语言指令解析与空间推理能力。随着GPT-4等大规模预训练模型在文本和图像理解上的显著进步,研究者们开始探索如何将这些模型应用于复杂的机器人抓取任务中,尤其是在零样本(zero-shot)设置下的表现。FreeGraspData通过扩展MetaGraspNetV2数据集,引入了人类标注的指令和抓取序列,为机器人提供了从杂乱环境中抓取目标物体的能力。该数据集的研究不仅推动了机器人对自由形式语言指令的理解,还通过空间推理优化了抓取动作的顺序,显著提高了任务完成的效率。这一研究方向为未来在非结构化环境中实现更智能的机器人操作提供了重要的理论和实践基础。
相关研究论文
- 1Free-form language-based robotic reasoning and graspingFondazione Bruno Kessler · 2025年
以上内容由遇见数据集搜集并总结生成


