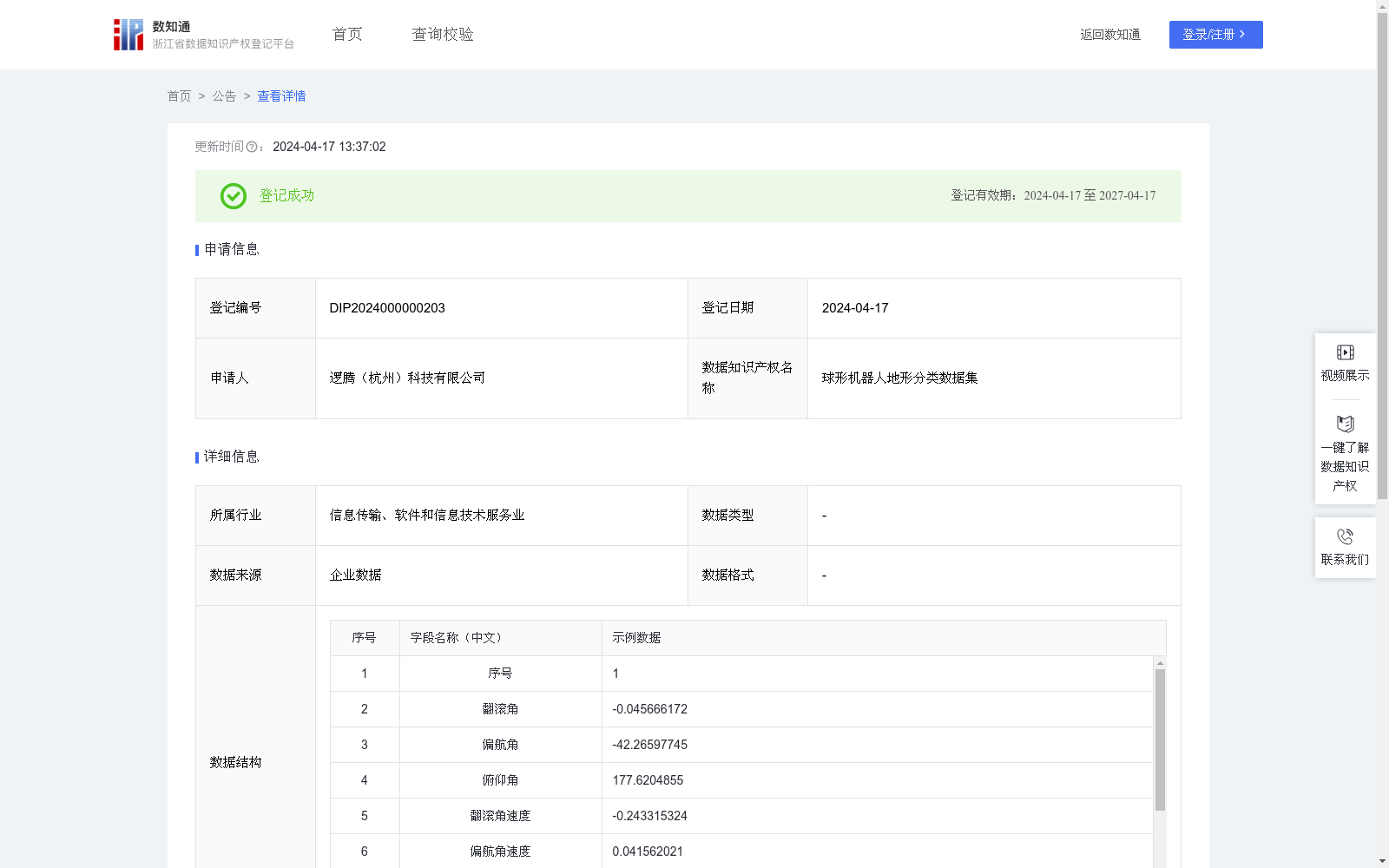
球形机器人地形分类数据集
收藏浙江省数据知识产权登记平台2024-04-17 更新2024-05-08 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/32518
下载链接
链接失效反馈官方服务:
资源简介:
球形机器人运动过程中实时识别地面类型,从而选择适配不同地形的控制器,进而达到更好的运行效果。1. 数据采集:驱动球形机器人在不同地面上进行运动,利用机器人自身所带的九轴惯性测量仪(IMU)采集机器人的三轴速度、角速度及其高阶导数信息:翻滚角、偏航角、俯仰角、翻滚角速度、偏航角速度、俯仰角速度、x轴加速度、y轴加速度、z轴加速度作为分类器输入。
2. 数据预处理:使用滑动窗口法将多帧数据拼接在一起,形成完整的带标签的数据集。
3. 数据训练:将数据集划分为训练集和测试集,去训练基于Xgboost的球形机器人地形分类器。其中Xgboost模型的输入为翻滚角、偏航角、俯仰角、翻滚角速度、偏航角速度、俯仰角速度、x轴加速度、y轴加速度、z轴加速度,输出为搭配地形标签。得到的结果可以表示为1、2、3,分别代表铺装路面,草地、石子地。
4.数据应用:将训练好的地形分类器部署在球形机器人上实时运行,输入实时机器人状态信息,进而输出实时地形标签。
提供机构:
逻腾(杭州)科技有限公司
创建时间:
2024-01-10
搜集汇总
数据集介绍
以上内容由遇见数据集搜集并总结生成


