Berkeley Cable Routing
收藏sites.google.com2025-03-21 收录
下载链接:
https://sites.google.com/view/cablerouting
下载链接
链接失效反馈官方服务:
资源简介:
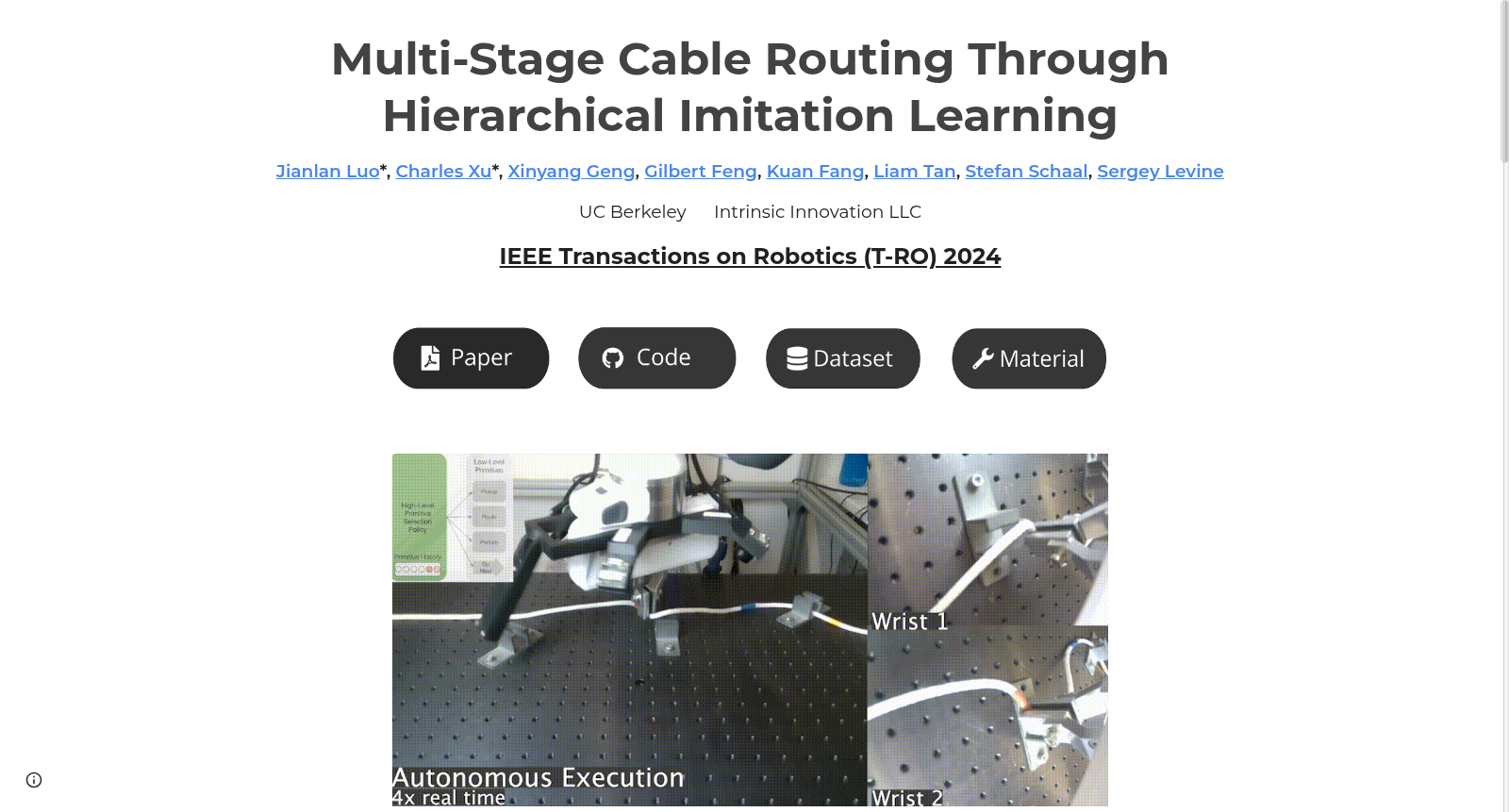
该数据集由加州大学伯克利分校人工智能研究实验室(BAIR)创建,旨在支持机器人电缆布线任务的研究。数据集包含 1442 条单个夹子电缆布线的演示轨迹和 257 条多阶段电缆布线任务的演示轨迹。数据集内容涵盖了多种夹子位置和电缆形状的变化,数据来源为人类专家通过遥操作机器人收集的演示数据。数据集的创建过程基于人类专家在不同夹子位置和电缆形状下进行电缆布线任务的演示,通过遥操作机器人收集数据。该数据集的应用领域主要集中在机器人多阶段操作任务的研究,特别是解决复杂、多阶段的电缆布线任务,旨在提高机器人在复杂环境中的自主学习能力和任务完成率。
This dataset was developed by the Berkeley Artificial Intelligence Research (BAIR) Lab at the University of California, Berkeley, to support research on robotic cable routing tasks. It contains 1442 demonstration trajectories for single-clamp cable routing and 257 demonstration trajectories for multi-stage cable routing tasks. The dataset covers variations in multiple clamp positions and cable configurations, with all data collected as demonstrations from human experts via teleoperated robots. Specifically, the dataset is constructed based on demonstrations of cable routing tasks performed by human experts under varying clamp positions and cable shapes, using teleoperated robots to gather the data. Its primary application focuses on research into robotic multi-stage manipulation tasks, particularly addressing complex, multi-stage cable routing problems, with the goal of enhancing robots' autonomous learning capabilities and task completion rates in complex environments.
提供机构:
加州大学伯克利分校人工智能研究实验室(BAIR)
搜集汇总
数据集介绍
背景与挑战
背景概述
该数据集聚焦于通过分层模仿学习实现多阶段机器人电缆路由任务,系统能够智能选择低级原语并展示鲁棒的恢复能力,适用于复杂场景下的电缆路由。
以上内容由遇见数据集搜集并总结生成


