CausalVerse
收藏github2025-10-17 更新2025-10-18 收录
下载链接:
https://github.com/CausalVerse/CausalVerseBenchmark
下载链接
链接失效反馈官方服务:
资源简介:
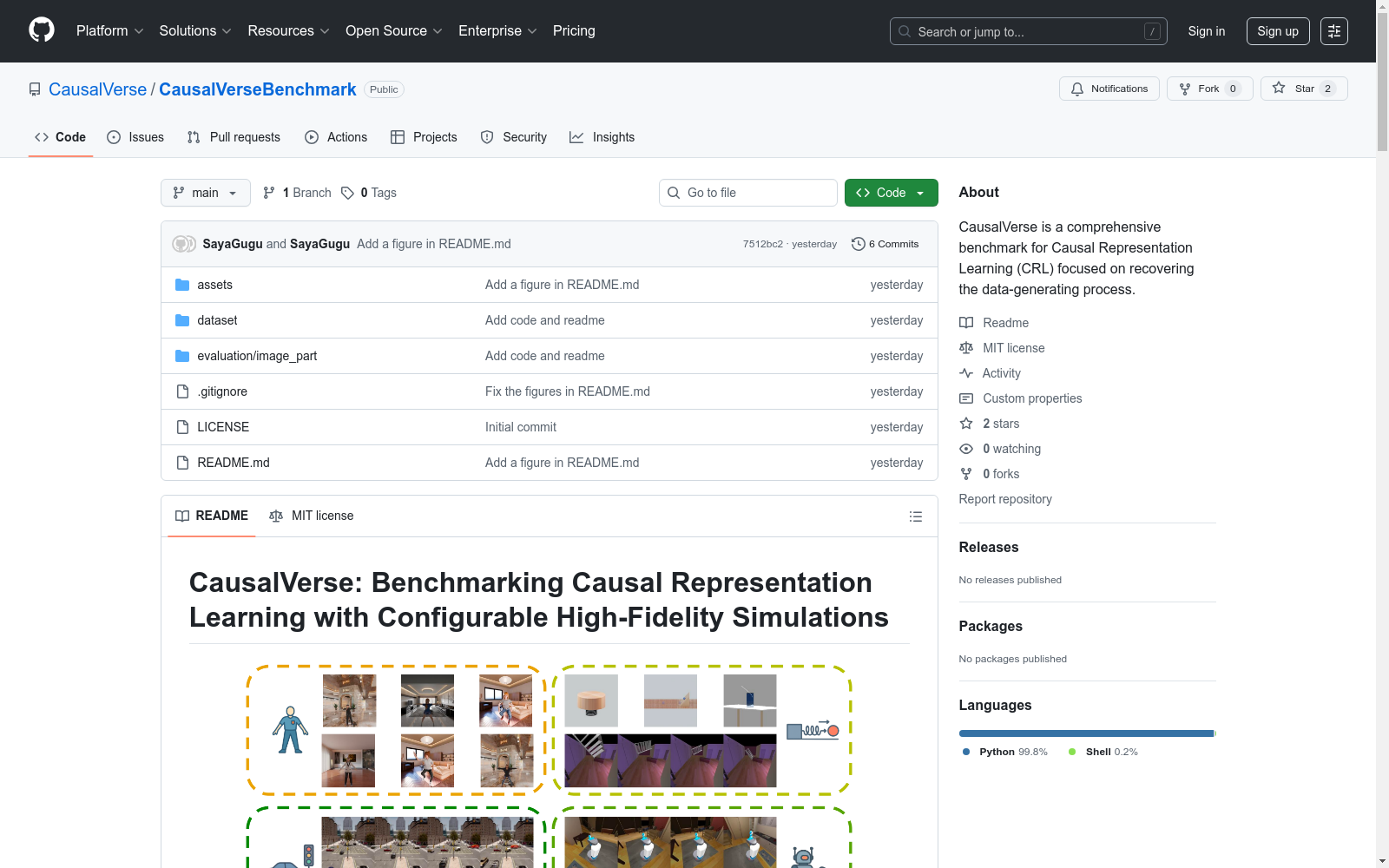
CausalVerse是一个用于因果表示学习的综合基准,专注于恢复数据生成过程。它结合了高保真、可控的模拟与可访问且可配置的ground-truth因果机制(结构、变量、干预、时间依赖),弥合了真实性与评估严谨性之间的差距。基准涵盖四个领域的24个子场景:静态图像生成、动态物理模拟、机器人操作和交通场景分析。数据集规模包括约20万张高分辨率图像、约14万个视频、超过3亿帧数据,分辨率通常为1024×1024/1920×1080,视频片段时长3-32秒,包含3-100+个因果变量。
CausalVerse is a comprehensive benchmark for causal representation learning, focusing on recovering the data generation process. It combines high-fidelity and controllable simulations with accessible and configurable ground-truth causal mechanisms including structure, variables, interventions and temporal dependencies, bridging the gap between realism and rigorous evaluation. The benchmark covers 24 sub-scenarios across four domains: static image generation, dynamic physical simulation, robotic manipulation and traffic scene analysis. The dataset includes approximately 200,000 high-resolution images, 140,000 videos and over 300 million frames, with typical resolutions of 1024×1024 or 1920×1080. The video clips last 3 to 32 seconds and each contains 3 to 100+ causal variables.
创建时间:
2025-10-17
原始信息汇总
CausalVerse 数据集概述
数据集基本信息
- 名称: CausalVerse Benchmark
- 发布状态: 公开可用(NeurIPS 2025 Spotlight)
- 发布日期: 2025年10月
- 项目主页: https://huggingface.co/CausalVerse
- 数据集地址: https://huggingface.co/datasets/CausalVerse/CausalVerse_Image
数据集规模与覆盖范围
- 总体规模: 约20万张高分辨率图像,约14万个视频,超过3亿帧
- 场景数量: 24个子场景
- 领域覆盖: 4个主要领域
- 静态图像生成(4个场景)
- 物理模拟(10个场景;聚合和动态)
- 机器人操作(5个场景)
- 交通场景分析(5个场景)
技术规格
- 分辨率: 典型1024×1024 / 1920×1080
- 视频时长: 3-32秒
- 帧率: 多样化
- 因果变量: 每个场景3-100+个变量
- 分类变量(如物体/材料类型)
- 连续变量(如速度、质量、位置)
- 时间场景结合全局不变量和时间演化变量
数据集结构
- 图像子集布局:
image/ FALL/ FALL.csv 000001.png ... SCENE1/ SCENE1.csv char_001.png ...
评估基准
- 基线方法:
- CRL_SC — 充分变化
- CRL_SF — 机制稀疏性
- CRL_SP — 多视图
- SUP — 监督上界
性能指标
| 算法 | 斜坡球体<br>MCC / R² | 圆柱弹簧<br>MCC / R² | 光线折射<br>MCC / R² | 平均<br>MCC / R² |
|---|---|---|---|---|
| 监督学习 | 0.9878 / 0.9962 | 0.9970 / 0.9910 | 0.9900 / 0.9800 | 0.9916 / 0.9891 |
| 充分变化 | 0.4434 / 0.9630 | 0.6092 / 0.9344 | 0.6778 / 0.8420 | 0.5768 / 0.9131 |
| 机制稀疏性 | 0.2491 / 0.3242 | 0.3353 / 0.2340 | 0.1836 / 0.4067 | 0.2560 / 0.3216 |
| 多视图 | 0.4109 / 0.9658 | 0.4523 / 0.7841 | 0.3363 / 0.7841 | 0.3998 / 0.8447 |
| 对比学习 | 0.2853 / 0.9604 | 0.6342 / 0.9920 | 0.3773 / 0.9677 | 0.4323 / 0.9734 |
使用要求
- Python版本: 3.9+
- 核心依赖: torch, datasets, huggingface_hub, pillow, tqdm
- 可选依赖: torchvision, scikit-learn, rich
搜集汇总
数据集介绍
构建方式
在因果表示学习领域,CausalVerse数据集通过高保真可控仿真技术构建,涵盖静态图像生成、动态物理模拟、机器人操控与交通场景分析四大领域。该数据集采用模块化生成策略,每个子场景均配置了可调节的因果机制参数,包括因果结构、变量类型与干预操作。数据生成过程融合了时序依赖与多智能体交互,通过物理引擎与渲染管线产生约20万张高分辨率图像及14万段视频,确保数据既具备现实复杂性又保留精确的因果可追溯性。
使用方法
使用者可通过Hugging Face平台获取数据子集,配套的PyTorch加载工具支持多分划数据流处理。数据集采用分文件夹存储结构,每个分划包含CSV元数据文件与PNG图像序列,通过render_path字段实现数据路径映射。内置的MultiSplitImageCSVDataset类支持批处理与图像变换,评估模块提供四种基线方法对比框架,用户可通过修改训练配置进行因果表示学习的可复现实验与算法验证。
背景与挑战
背景概述
因果表征学习作为人工智能领域的前沿方向,致力于从观测数据中解耦生成机制的本质规律。CausalVerse基准数据集于2025年由多机构联合发布,作为NeurIPS会议焦点成果,通过构建涵盖静态图像生成、动态物理仿真、机器人操控与交通场景分析的四维领域,系统整合了24个子场景的高保真模拟数据。该数据集以可配置的因果机制为核心创新点,为验证因果发现算法提供了兼具现实复杂性与理论严谨性的评估框架,显著推动了因果推理与表征学习的交叉研究。
当前挑战
在因果表征学习领域,核心挑战在于从高维观测中分离隐变量间的因果结构,尤其在存在未观测混杂因子或瞬时交互的场景中。CausalVerse构建过程中面临多重技术难点:首先需在物理引擎与渲染管线中实现因果变量的精确映射,确保质量、位置等连续变量与材质类型等离散变量的协同控制;其次需平衡时序依赖关系的建模复杂度,既要捕捉动态系统的演化规律,又要维持跨场景评估的一致性;最后还需设计标准化评估协议,使不同因果发现算法能在统一度量下进行可比性验证。
常用场景
经典使用场景
在因果表示学习领域,CausalVerse通过高保真模拟环境为算法验证提供了标准化平台。该数据集涵盖静态图像生成与动态物理仿真等四大领域,其经典应用体现在对因果变量分离能力的系统性评估。研究者可借助可配置的因果机制,在受控环境中测试表征学习模型对数据生成过程的还原精度,特别是在处理多智能体交互与时间依赖性等复杂场景时展现出独特价值。
解决学术问题
该数据集有效解决了因果表示学习中缺乏可靠评估基准的学术困境。通过提供精确标注的因果结构与干预变量,它使研究者能够量化模型对潜在因果机制的识别能力。其意义在于建立了仿真数据与真实世界之间的理论桥梁,为验证因果发现算法、评估表征解耦性能提供了严谨的数学框架,显著推进了因果推理与机器学习交叉领域的方法论发展。
实际应用
在自动驾驶系统开发中,CausalVerse的交通场景数据可用于构建更可靠的因果推理模型。其动态物理仿真模块能够模拟机器人抓取过程中的力学交互,为工业自动化提供安全验证环境。医疗影像分析领域则可借鉴其多视角生成机制,通过可控变量干预来增强模型对病理特征的鲁棒性识别,这些应用均体现了从仿真到实际场景的因果知识迁移能力。
数据集最近研究
最新研究方向
在因果表征学习领域,CausalVerse通过高保真可配置仿真系统构建了跨领域基准测试框架,其前沿研究聚焦于动态物理仿真与多智能体交互场景中的因果机制解耦。当前热点探索方向涵盖时序因果变量分离、干预响应建模以及跨场景泛化能力评估,特别是结合神经符号计算与强化学习的方法正推动自动驾驶和机器人决策系统的突破性进展。该数据集通过提供精确的地面真实因果结构,显著提升了因果发现算法在复杂现实环境中的可解释性与可靠性,为人工智能系统实现因果推理能力奠定了关键实证基础。
以上内容由遇见数据集搜集并总结生成


