可访问arxiv网站地址https://arxiv.org/abs/2204.10149v1,然后点击右上角view pdf看到论文内容,在论文内容里面查找其引用的数据集的源地址;如果找不到可以到网站的左下角点击view email查看作者邮箱,可以作者发邮件获取数据集内容或者下载地址信息。
EvTTC
收藏arXiv2024-12-06 更新2024-12-10 收录
下载链接:
https://nail-hnu.github.io/EvTTC/
下载链接
链接失效反馈官方服务:
资源简介:
EvTTC数据集是由湖南大学机器人学院神经形态自动化与智能实验室创建的,专注于碰撞时间(TTC)估计任务。该数据集结合了标准相机和事件相机的数据,覆盖了日常驾驶中的多种潜在碰撞场景,并涉及多个碰撞对象。此外,数据集还提供了LiDAR和GNSS/INS测量数据,用于计算地面真实TTC。数据集的创建过程包括硬件配置、时间同步和多传感器校准。EvTTC数据集的应用领域主要集中在自动驾驶和机器人视觉技术的发展,旨在解决高相对速度场景下的碰撞预警和避免问题。
The EvTTC dataset was created by the Neuromorphic Automation and Intelligence Laboratory, School of Robotics, Hunan University, focusing on the time-to-collision (TTC) estimation task. This dataset combines data from standard cameras and event cameras, covering multiple potential collision scenarios in daily driving and involving multiple collision objects. In addition, the dataset provides LiDAR and GNSS/INS measurement data for calculating the ground-truth TTC. The creation process of the EvTTC dataset includes hardware configuration, time synchronization and multi-sensor calibration. The main application areas of the EvTTC dataset focus on the development of autonomous driving and robotic vision technologies, aiming to solve collision warning and avoidance problems in scenarios with high relative speeds.
提供机构:
湖南大学机器人学院神经形态自动化与智能实验室
创建时间:
2024-12-06
原始信息汇总
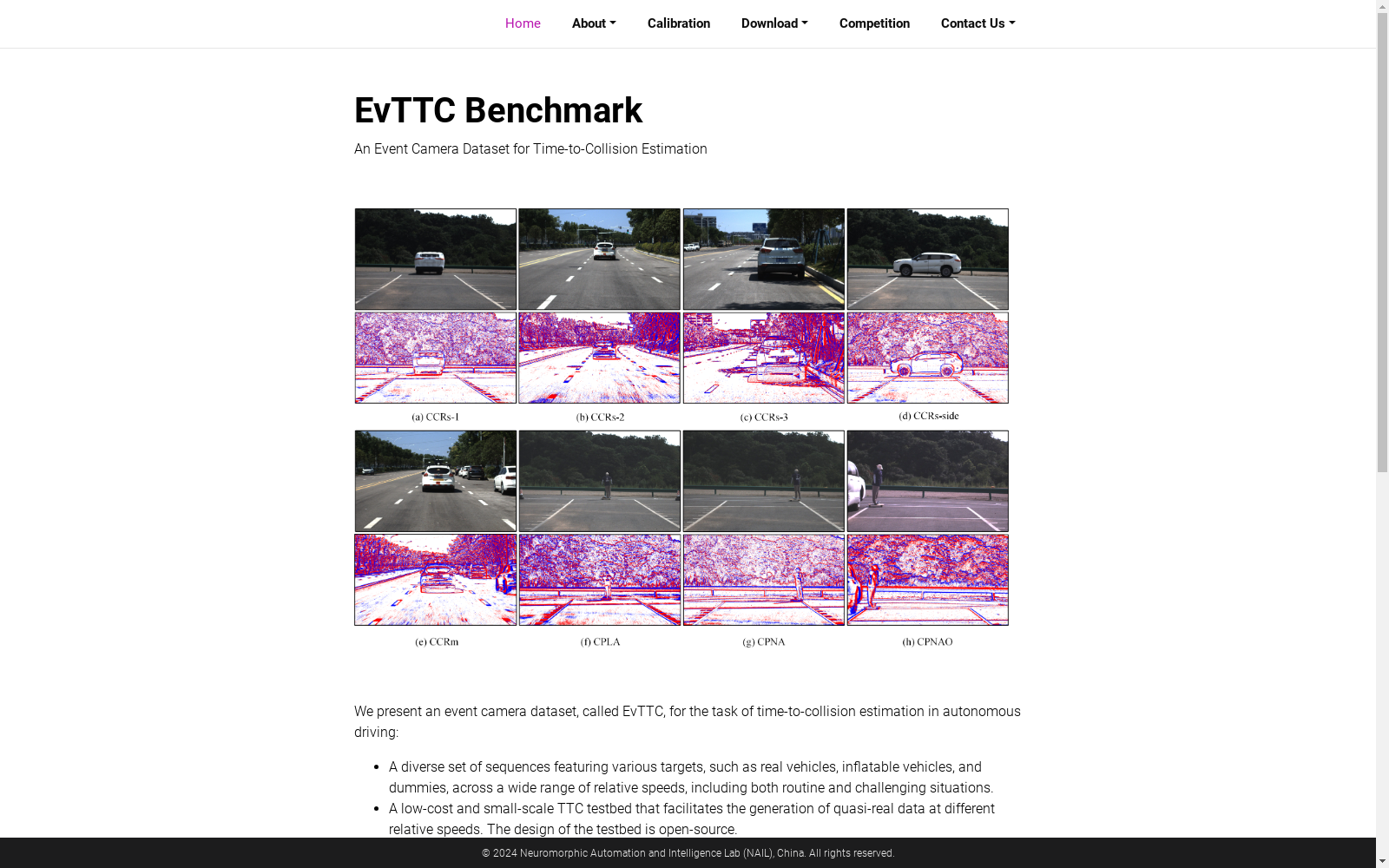
EvTTC Benchmark 数据集概述
数据集名称
EvTTC Benchmark
描述
EvTTC Benchmark 是一个用于时间到碰撞估计的事件相机数据集。
关键词
- EvTTC Benchmark
- Event-based
- Multi-Sensor
- Dataset
相关链接
搜集汇总
数据集介绍
构建方式
EvTTC数据集的构建基于多传感器同步采集系统,包括标准相机、事件相机、LiDAR和GNSS/INS设备。这些传感器被配置为在硬件级别进行时间同步,确保数据采集的精确性。数据集涵盖了多种潜在碰撞场景,包括日常驾驶中的各种情况,并涉及多个碰撞对象。此外,数据集还提供了一个小型TTC测试平台,用于实验验证和数据增强。
特点
EvTTC数据集的主要特点在于其多传感器配置和多样化的碰撞场景。事件相机的高时间分辨率和异步亮度变化报告能力使其在处理高速运动和极端光照条件下具有优势。数据集包含了从低速到高速的各种相对速度场景,以及不同类型的碰撞目标,如真实车辆、充气车辆和行人。此外,数据集还提供了LiDAR和GNSS/INS测量数据,用于计算地面真实TTC。
使用方法
EvTTC数据集适用于开发和评估基于视觉的TTC估计技术。研究者可以使用数据集中的多传感器数据进行算法训练和测试,特别是针对高速和极端条件下的TTC估计。数据集还提供了一个小型TTC测试平台,用于生成准真实数据,进一步验证算法的有效性。通过使用EvTTC数据集,研究者可以推动事件相机在自动驾驶和机器人领域的应用,特别是在前向碰撞预警和自动紧急制动系统中的应用。
背景与挑战
背景概述
EvTTC数据集,由湖南大学的神经形态自动化与智能实验室(NAIL)主导开发,旨在解决自动驾驶系统中的时间到碰撞(TTC)估计问题。该数据集于2024年发布,主要研究人员包括Kaizhen Sun、Jinghang Li等,其核心研究问题是如何在高相对速度场景下准确估计TTC,以提升自动驾驶车辆的安全性。EvTTC数据集的推出填补了事件相机在高相对速度场景下TTC估计的空白,对推动自动驾驶技术的发展具有重要意义。
当前挑战
EvTTC数据集面临的挑战主要包括两个方面:一是解决传统基于帧的相机在高相对速度场景下因曝光时间间隔导致的系统延迟问题,特别是在紧急制动情况下;二是构建过程中需要克服事件相机数据与标准相机数据的高精度同步问题,以及多传感器系统间的复杂校准任务。此外,数据集还需应对极端光照条件和快速运动带来的数据处理难题,以确保TTC估计的准确性和实时性。
常用场景
经典使用场景
EvTTC数据集在自动驾驶领域中被广泛用于时间到碰撞(TTC)估计任务。该数据集通过结合标准相机和事件相机的数据,覆盖了日常驾驶中的多种潜在碰撞场景,包括高速相对运动下的紧急制动情况。通过提供高精度的地面真实数据,如深度信息和车辆运动状态,EvTTC数据集为开发和验证基于视觉的TTC技术提供了坚实的基础。
衍生相关工作
基于EvTTC数据集,研究者们开发了多种TTC估计算法,如STRTTC、CMax、ETTCM等。这些算法在数据集上进行了广泛的测试和比较,展示了各自的优势和局限性。此外,EvTTC数据集还启发了小型TTC测试平台的设计,为算法验证和数据增强提供了实验环境。这些衍生工作进一步推动了事件相机在自动驾驶中的应用研究。
数据集最近研究
最新研究方向
在自动驾驶领域,时间到碰撞(TTC)估计是自动紧急制动(AEB)系统的核心功能之一。尽管基于帧的摄像头在正常情况下表现出色,但在极端情况下,如前车速度突变或行人突然出现,传统摄像头由于其固有的成像原理,难以应对。事件摄像头作为一种新型生物启发传感器,具有超高时间分辨率和微秒级亮度变化报告能力,为解决这些挑战提供了新的可能性。EvTTC数据集的提出,旨在填补高相对速度场景下TTC估计研究的空白,通过结合标准摄像头和事件摄像头,覆盖多种潜在碰撞场景,并提供LiDAR和GNSS/INS测量数据以计算地面真实TTC。该数据集不仅为TTC任务提供了一个全面的基准,还设计了一个小规模TTC测试平台,以促进实验验证和数据增强,从而推动基于事件摄像头的TTC技术的发展。
相关研究论文
- 1EvTTC: An Event Camera Dataset for Time-to-Collision Estimation湖南大学机器人学院神经形态自动化与智能实验室 · 2024年
以上内容由遇见数据集搜集并总结生成


