robusto-1_extended
收藏Robusto-1 Extended 数据集概述
基本信息
- 数据集名称: Robusto-1 Extended
- 标签: video, urban-driving, peru, traffic, autonomous-driving
- 许可证: Apache-2.0
- 任务类别: video-classification
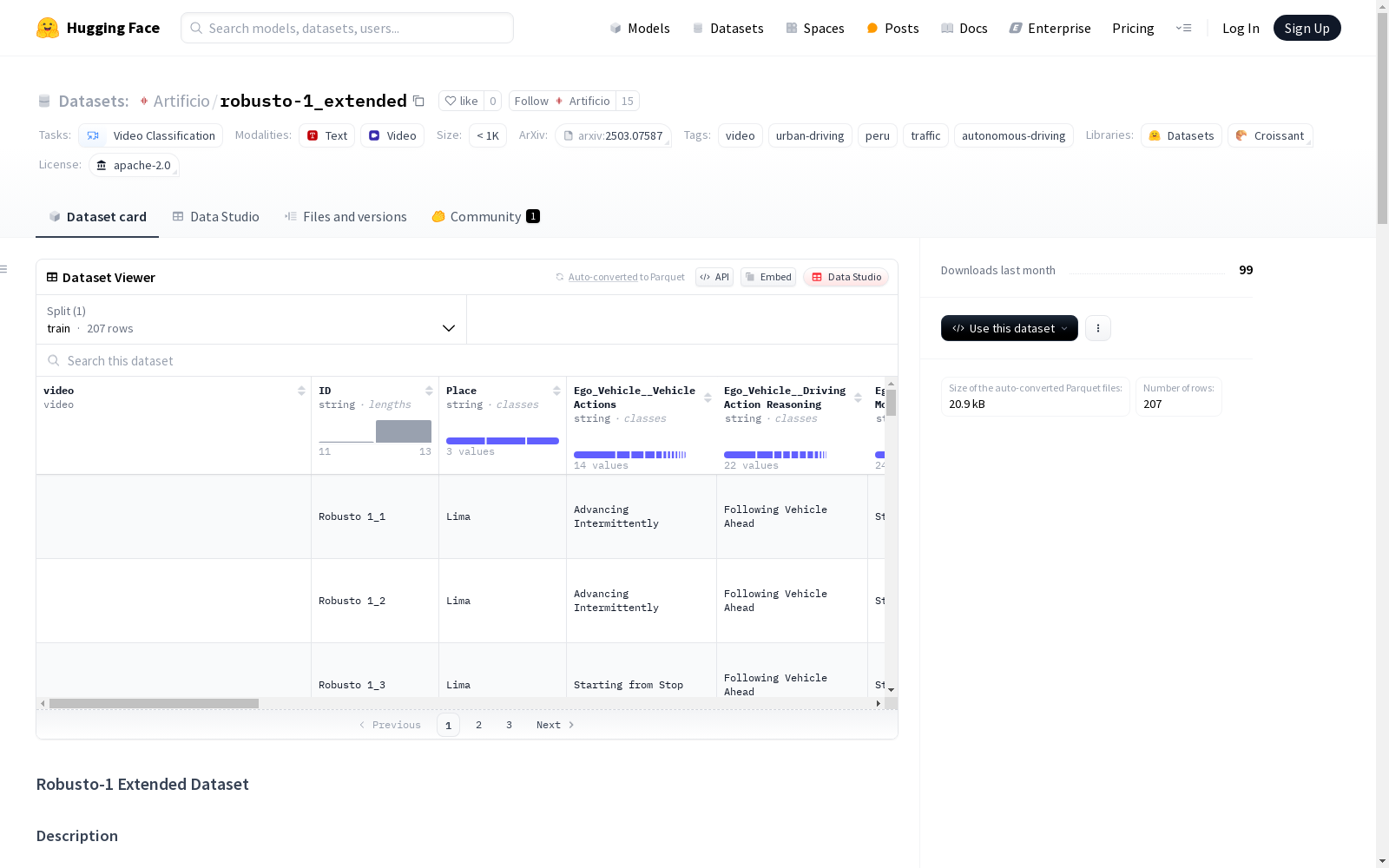
数据集描述
- 内容: 包含秘鲁3个城市(主要是利马、库斯科和卡哈马卡)录制的视频,涵盖车辆行为、外部因素和驾驶条件的详细信息。
- 用途: 适用于车辆行为分析、交通状况检测和驾驶场景模拟等任务。
- 特点:
- 每个视频记录包含自我车辆行为、外部条件(交通标志、天气等)的详细信息。
- 视频在各种交通条件下录制,并附有相应的元数据标签。
主要特征
- ID: 视频的唯一标识符。
- Video_Name: 视频文件名。
- Place: 视频录制地点。
- Ego_Vehicle: 录制期间自我车辆行为的详细信息。
- External_Factors: 外部条件(如交通标志、天气等)。
- Video:
.mp4格式的视频文件路径。
元数据示例
json { "ID": "Robusto 1_1", "Place": "Lima", "Ego_Vehicle": { "Vehicle Actions": "Advancing Intermittently", "Driving Action Reasoning": "Following Vehicle Ahead", "Vehicle Motion Behavior": "Stop-and-Go" }, "External_Factors": { "Traffic Signs": "", "Traffic Lights": "Red", "Weather Conditions": "Clear", "Road Surface Conditions": "", "Road Structures": "", "Static objects": "Buildings", "Other Vehicle Behaviors": "Cutting Off", "Pedestrian Behavior": "", "Unexpected Obstacles": "", "Emergency Situations": "", "Lighting Conditions": "Daylight", "Traffic Conditions": "Heavy Traffic", "Driving Environment": "Urban" } }
数据集使用
- 用途: 车辆行为分析、改进自动驾驶算法、训练/测试需要交通和车辆行为数据的计算机视觉模型。
- 加载方式: python from datasets import load_dataset dataset = load_dataset("path/to/robusto-1_extended")
文件结构
robusto-1_extended/ ├── README.md ├── metadata.jsonl └── videos/ ├── Robusto 1_1.mp4 ├── Robusto 1_2.mp4 └── ...
与Robusto-1数据集的区别
- Robusto-1 Extended: 包含200个视频及其元数据,用于VQA研究,便于不同团队创建自己的问题。
- Robusto-1: 包含7个视频片段,同时包含人类和机器响应以及视频元数据。
引用
bibtex @article{cusipuma2025robusto, title={Robusto-1 Dataset: Comparing Humans and VLMs on real out-of-distribution Autonomous Driving VQA from Peru}, author={Cusipuma, Dunant and Ortega, David and Flores-Benites, Victor and Deza, Arturo}, journal={arXiv preprint arXiv:2503.07587}, year={2025} }