FurnitureBench
收藏arXiv2023-05-22 更新2024-12-12 收录
下载链接:
https://clvrai.github.io/furniture-bench/docs/tutorials/dataset.html
下载链接
链接失效反馈官方服务:
资源简介:
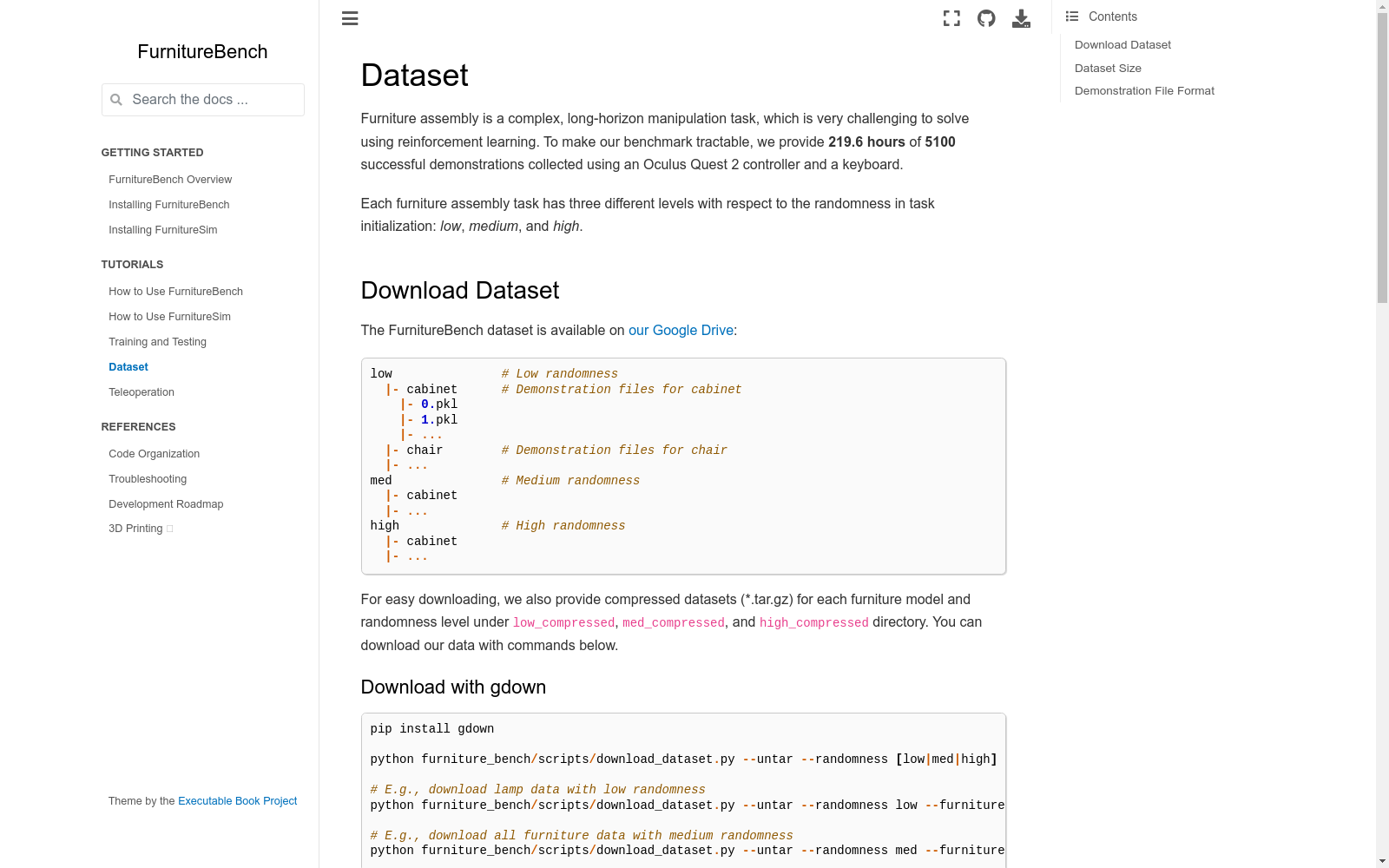
FurnitureBench是一个用于测试真实机器人复杂长时域操作任务的数据集。数据集聚焦于家具组装这一复杂长时域操作任务,其任务层次结构长,涉及家具部件的选择、抓取、移动、对齐和连接等步骤,平均任务时长在 60 - 230 秒(600 - 2300 低层级步骤)。任务要求机器人具备多种复杂技能,如精确抓取(不同家具部件抓取姿态各异)、部件重定向(通过拾取放置或推动实现)、路径规划(避免碰撞已组装部件)、插入和拧紧(精确对齐并重复操作)等。
FurnitureBench is a dataset for testing complex long-horizon manipulation tasks on real robots. This dataset focuses on furniture assembly, a complex long-horizon manipulation task with a lengthy hierarchical task structure involving steps such as furniture component selection, grasping, moving, alignment, and fastening. The average task duration ranges from 60 to 230 seconds, corresponding to 600 to 2300 low-level steps. Such tasks require robots to possess a range of complex skills, including precise grasping (with distinct grasping postures for different furniture components), component redirection (implemented via pick-and-place or pushing), path planning to avoid collisions with already assembled components, and insertion and tightening operations that demand precise alignment and repeated actions, among others.
提供机构:
KAIST
创建时间:
2023-05-22
搜集汇总
数据集介绍
构建方式
在机器人操作领域,为应对复杂长时程任务的评估需求,FurnitureBench数据集通过构建可复现的真实世界家具组装环境而建立。该数据集采用广泛使用的Franka Emika Panda机械臂与Intel RealSense D435相机搭建硬件平台,并利用3D打印技术制作了八款受宜家家具启发的组装模型。为确保实验的可重复性,研究团队提供了详尽的环境搭建指南、软件工具链以及基于AprilTag的物体位姿估计系统。数据收集通过VR遥控与键盘操作相结合的方式,累计录制了超过200小时的成功演示轨迹,涵盖低、中、高三种不同随机化程度的初始配置,从而形成了大规模、多样化的示范数据集。
特点
FurnitureBench数据集的核心特点在于其强调真实世界的复杂性与可重复性的平衡。该数据集专注于长时程、多阶段的家具组装任务,平均任务跨度达60至230秒,涉及抓取、插入、拧螺丝等多种灵巧操作技能。其独特之处在于提供了完全可3D打印的家具模型,使得全球任何实验室都能复现完全一致的物理实验条件。此外,数据集配套开发了FurnitureSim高保真仿真环境,支持算法的快速原型验证。数据集中包含的超过5000条演示轨迹,不仅为模仿学习与离线强化学习提供了丰富的训练样本,还通过系统化的任务初始化工具确保了评估过程的一致性与可比性。
使用方法
研究人员可利用FurnitureBench数据集对模仿学习、离线强化学习及任务与运动规划算法进行系统化评估。使用前需按照提供的指南搭建硬件环境并部署配套的Docker软件栈。评估时,通过任务初始化GUI工具按照预设的低、中、高随机性级别设置家具零件的初始位姿,确保不同实验间的可比性。算法接收来自前视相机、腕部相机的视觉观测以及机器人的本体感知状态作为输入,输出末端执行器的增量位姿与夹爪动作。性能评估不仅关注最终组装成功率,更通过细粒度的“阶段”完成数来衡量算法在长时程任务中的进展。配套的仿真环境FurnitureSim可用于算法的快速迭代与调试,尽管需注意其与真实世界存在的域差异。
背景与挑战
背景概述
FurnitureBench作为一项开创性的机器人操作基准,由KAIST与UC Berkeley的研究团队于2023年联合推出,旨在应对长时域复杂操作任务的评估需求。该数据集聚焦于真实世界家具组装任务,通过提供可3D打印的家具模型、详尽的系统搭建指南以及超过200小时的遥操作演示数据,为强化学习、模仿学习及任务与运动规划算法的性能测试构建了标准化平台。其核心研究在于推动机器人从简单的拾放操作向多步骤、高精度装配等复杂场景演进,显著提升了相关领域对长时域任务可复现性研究的关注度。
当前挑战
FurnitureBench所针对的家具组装任务,本质上属于长时域、多技能的复杂操作问题,其挑战主要体现在算法需在单次任务中连续执行抓取、对齐、插入、拧紧等多种技能,并应对部件间碰撞规避、精确位姿控制等难题。在数据集构建过程中,研究团队面临了真实世界环境的高复现性要求,包括机器人系统标准化、多相机视角校准、光照与背景一致性控制等工程挑战;同时,大规模高质量演示数据的采集需克服遥操作中的精细控制难题,并确保不同初始化条件下任务状态的多样性覆盖。
常用场景
经典使用场景
在机器人操作研究领域,FurnitureBench 作为首个可复现的真实世界家具组装基准,其经典应用场景聚焦于评估强化学习、模仿学习及任务与运动规划算法在长时程复杂操作任务中的性能。该数据集通过提供标准化的机器人系统配置、3D打印家具模型及大规模遥操作演示数据,使研究者能够在统一环境下测试算法处理多步骤组装任务的能力,如抓取、插入、拧螺丝等精细操作,从而系统性地衡量算法在真实物理交互中的泛化性与鲁棒性。
实际应用
在实际应用层面,FurnitureBench 为自主机器人执行复杂组装任务提供了直接的测试平台。其模拟的真实家具组装流程,如椅子、桌子的装配,直接对应家庭服务、工业制造等场景中的自动化需求。通过该数据集训练的算法,能够提升机器人在非结构化环境中处理多部件、需精密对齐与力控操作的能力,为开发适用于家庭助理、柔性生产线等领域的机器人系统奠定了技术基础。同时,其附带的仿真环境 FurnitureSim 支持快速原型验证,加速了从算法研发到实际部署的转化过程。
衍生相关工作
围绕 FurnitureBench 数据集,已衍生出一系列经典研究工作,主要集中在长时程操作算法的改进与仿真到真实迁移的探索。例如,基于其提供的演示数据,研究者开发了更高效的离线强化学习方法以处理稀疏奖励与长时程依赖;同时,结合 R3M、VIP 等视觉表征学习模型,提升了策略在复杂视觉观察下的泛化能力。此外,该数据集启发了对多任务学习、技能组合以及跨家具类别泛化的研究,推动了机器人操作社区从单一技能学习向整体任务理解的范式转变,并为后续构建更复杂的多臂协作或移动操作基准提供了重要参考。
以上内容由遇见数据集搜集并总结生成


