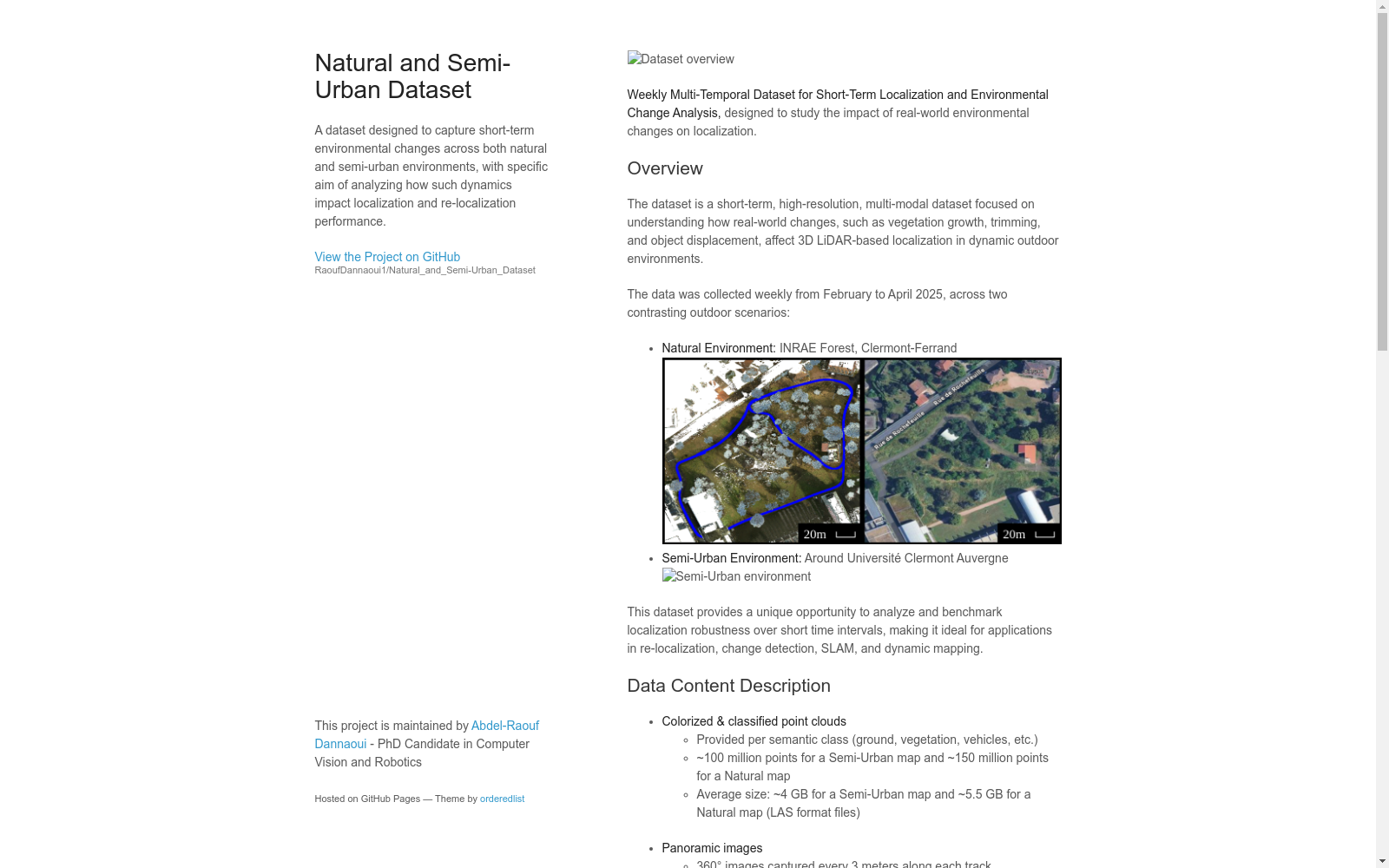
Natural and Semi-Urban Dataset
收藏arXiv2025-07-23 更新2025-08-13 收录
下载链接:
https://raoufdannaoui1.github.io/Natural_and_Semi-Urban_Dataset/
下载链接
链接失效反馈官方服务:
资源简介:
该数据集是一个高分辨率、短期多时相的数据集,旨在研究环境变化下的定位问题。数据集从2025年2月开始,每周收集一次,覆盖了自然和半城市环境。每个会话包括高密度点云图、360度全景图像和轨迹数据。该数据集为评估短期定位鲁棒性提供了一个结构化的数据集,并提供了在噪声下分析扫描到地图对准的框架,以及比较ICP在动态户外环境中性能的方法。
This high-resolution, short-term multi-temporal dataset is designed to investigate localization issues under varying environmental conditions. It was collected weekly starting from February 2025, spanning both natural and semi-urban environments. Each recording session contains high-density point clouds, 360-degree panoramic images, and trajectory data. This dataset serves as a structured benchmark for evaluating the robustness of short-term localization, providing a framework for analyzing scan-to-map alignment under noisy conditions and a methodology for comparing the performance of Iterative Closest Point (ICP) in dynamic outdoor environments.
提供机构:
INRAE Clermont Ferrand, Northern Robotics Laboratory, Universite Laval, Institut Pascal, Clermont Auvergne INP, CNRS
创建时间:
2025-07-23
搜集汇总
数据集介绍
构建方式
Natural and Semi-Urban Dataset的构建基于高分辨率激光雷达技术,通过Leica Pegasus TRK100移动测绘系统在自然和半城市场景中每周采集数据。数据采集从2025年2月持续至4月,涵盖植被生长、物体位移等短时环境变化。每个会话包含高密度点云地图、360度全景图像和轨迹数据,并通过投影激光雷达扫描模拟真实传感器遮挡,确保数据的高保真度和实用性。
使用方法
使用该数据集时,研究者可通过对比不同时间点的点云数据,分析环境变化对定位精度的影响。数据集支持投影激光雷达扫描与地面真实地图的配准评估,用户可引入受控扰动模拟实际定位误差。配套的评估框架允许量化ICP变体(如Point-to-Point和Point-to-Plane)的性能差异,适用于自动驾驶、环境监测等领域的算法开发与验证。
背景与挑战
背景概述
Natural and Semi-Urban Dataset是由Abdel-Raouf Dannaoui等研究人员于2025年提出的高分辨率多时相数据集,旨在研究动态户外环境中3D激光雷达的鲁棒重定位问题。该数据集由法国克莱蒙奥弗涅大学和加拿大拉瓦尔大学北方机器人实验室联合开发,采集周期为2025年2月至4月,每周在自然与半城市场景进行同步数据采集。核心研究聚焦于短期环境变化(如植被生长、物体位移)对迭代最近点(ICP)算法性能的影响,填补了现有长期季节性数据集与单日采集数据之间的研究空白。通过提供包含高密度点云地图、360度全景图像和轨迹数据在内的多模态数据,该数据集为自动驾驶、环境监测等领域的动态场景定位算法评估建立了新的基准。
当前挑战
该数据集主要解决动态户外环境中激光雷达重定位的精度退化问题,面临三大核心挑战:1) 环境动态性挑战,植被周际变化率最高达8.68%(自然场景)和9.53%(半城市场景),导致传统ICP算法出现特征匹配歧义;2) 传感器建模挑战,需在投影激光扫描中精确模拟32线雷达的遮挡效应,其15,000点/扫描的密度要求平衡计算效率与特征完整性;3) 评估框架挑战,通过引入高斯扰动(平移0.1m,旋转5度)构建的30次随机初始化测试协议,需解决真实噪声环境下的算法稳定性量化难题。数据构建过程中,双向轨迹采集的时空一致性维护、每周环境变化的可解释标注(如Week 09异常植被生长)以及多传感器(激光雷达/全景相机/GNSS-IMU)的时空标定构成了主要技术壁垒。
常用场景
经典使用场景
Natural and Semi-Urban Dataset 主要用于评估动态户外环境中激光雷达(LiDAR)定位算法的鲁棒性。该数据集通过每周高频率采集自然和半城市场景的高密度点云地图、全景图像和轨迹数据,为研究短期环境变化(如植被生长、物体位移等)对定位精度的影响提供了丰富的数据支持。经典使用场景包括测试迭代最近点(ICP)算法在不同环境条件下的性能表现,特别是在稀疏特征或密集植被区域中的稳定性。
解决学术问题
该数据集解决了短期环境变化对定位系统影响的学术研究问题。传统数据集通常关注长期季节性变化或单日采集,而忽略了短时间内的环境动态变化。通过提供每周更新的高分辨率数据,该数据集填补了这一空白,使研究者能够深入分析植被修剪、车辆移动等短期变化对激光雷达定位的影响。这对于提升自动驾驶系统和机器人在动态环境中的定位鲁棒性具有重要意义。
实际应用
在实际应用中,Natural and Semi-Urban Dataset 可用于农业机器人导航、环境监测和城市自动驾驶系统的开发。例如,在农业场景中,机器人需要频繁应对植被生长和地形变化,该数据集提供的短期环境变化数据能够帮助优化机器人的定位算法,确保其在复杂环境中的稳定运行。此外,半城市场景的数据也为自动驾驶车辆在动态城市环境中的定位和路径规划提供了重要参考。
数据集最近研究
最新研究方向
在动态户外环境中的鲁棒重定位技术正成为自动驾驶系统研究的焦点,特别是针对短期环境变化(如植被生长、物体位移等)对3D激光雷达定位性能的影响。Natural and Semi-Urban Dataset通过高分辨率、多时相的数据采集,为研究短期环境变化下的定位算法性能提供了重要基准。最新研究集中在迭代最近点(ICP)算法的优化与比较,尤其是Point-to-Plane ICP在稀疏特征或密集植被环境中的稳定性和准确性表现。该数据集不仅填补了现有基准在短期环境变化研究上的空白,还为设计更具适应性的机器人系统提供了实证基础,推动了动态环境下定位算法的前沿探索。
相关研究论文
- 1When and Where Localization Fails: An Analysis of the Iterative Closest Point in Evolving EnvironmentINRAE Clermont Ferrand, Northern Robotics Laboratory, Universite Laval, Institut Pascal, Clermont Auvergne INP, CNRS · 2025年
以上内容由遇见数据集搜集并总结生成


