DrIFT
收藏github2024-12-13 更新2024-12-20 收录
下载链接:
https://github.com/CARG-uOttawa/DrIFT
下载链接
链接失效反馈官方服务:
资源简介:
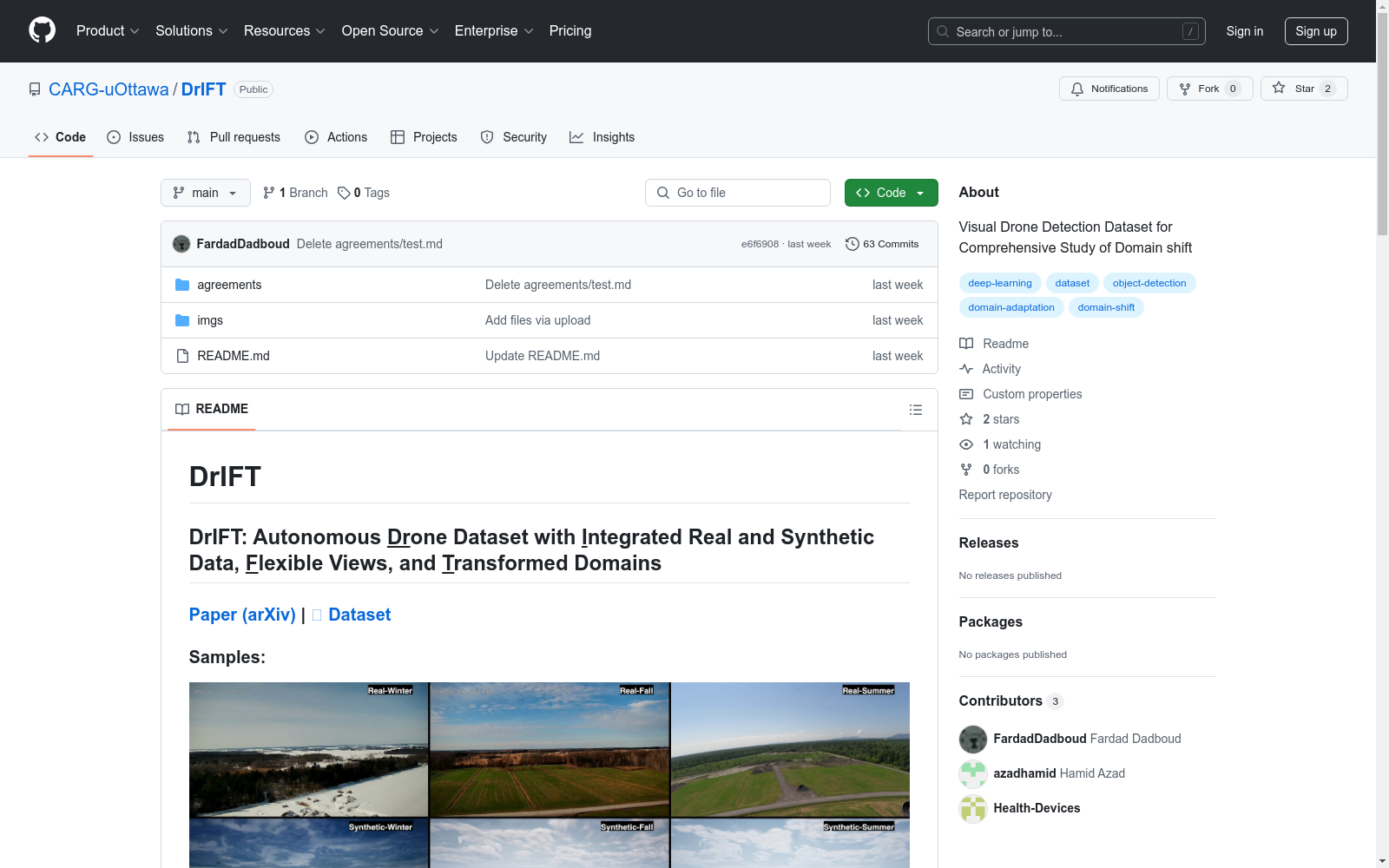
DrIFT是一个自主无人机数据集,集成了真实和合成数据,具有灵活的视角和变换的领域,适用于领域转移的全面研究。
DrIFT is an autonomous drone dataset that integrates real and synthetic data, features flexible viewpoints and shifted domains, and is specifically designed for comprehensive research on domain shift.
创建时间:
2024-11-28
原始信息汇总
DrIFT
数据集概述
DrIFT 是一个自主无人机数据集,包含集成真实和合成数据、灵活视角以及变换域的数据。
相关资源
样本展示



.jpg)
架构图
.png)
背景展示
- 天空背景:
.png)
- 树木背景:
.png)
- 地面背景:
.png)
最新动态
- 2024年12月:数据集的真实部分正在准备中,即将上线。
- 2024年12月:已在 🤗 上传数据集 V1(合成部分)。
- 2024年12月:论文的 arXiv 版本已提交。
- 2024年10月:论文被 IEEE/CVF WACV 2025 接受。
数据集下载
请下载、填写并签署 协议,并发送至 fardad.dadboud@uottawa.ca(请在邮件主题中注明 "DrIFT_download")。之后,我们将为您提供数据集下载权限。
引用
@misc{dadboud2024driftautonomousdronedataset, title={DrIFT: Autonomous Drone Dataset with Integrated Real and Synthetic Data, Flexible Views, and Transformed Domains}, author={Fardad Dadboud and Hamid Azad and Varun Mehta and Miodrag Bolic and Iraj Mantegh}, year={2024}, eprint={2412.04789}, archivePrefix={arXiv}, primaryClass={cs.CV}, url={https://arxiv.org/abs/2412.04789}, }
搜集汇总
数据集介绍
构建方式
DrIFT数据集的构建方式独具匠心,它巧妙地融合了真实与合成数据,旨在为无人机领域提供一个全面且多样化的数据资源。该数据集不仅包含了从真实环境中采集的无人机视角图像,还通过先进的合成技术生成了大量虚拟场景数据,确保了数据的多维度覆盖。此外,数据集还特别设计了灵活的视角变换,以模拟无人机在不同飞行状态下的观测视角,从而增强了数据的真实性和应用的广泛性。
特点
DrIFT数据集的显著特点在于其高度集成性和多样性。首先,数据集同时涵盖了真实与合成数据,这不仅丰富了数据的来源,还为模型训练提供了更为全面的样本。其次,数据集中的图像视角灵活多变,能够模拟无人机在不同飞行高度和角度下的观测情况,极大地提升了数据的应用价值。最后,数据集还包含了经过变换的领域数据,使得模型能够在多种环境下进行有效的训练和验证。
使用方法
使用DrIFT数据集时,用户需首先下载并签署相关协议,随后通过电子邮件申请下载权限。获得权限后,用户可以从🤗平台下载数据集。数据集的使用涵盖了多个领域,包括但不限于无人机导航、目标检测和环境感知等。用户可以根据具体需求选择合适的数据子集进行模型训练和验证,以提升无人机系统的自主性和鲁棒性。
背景与挑战
背景概述
DrIFT数据集,由Fardad Dadboud等人于2024年创建,是一个专注于无人机自主导航与视觉感知的前沿数据集。该数据集整合了真实与合成数据,提供了灵活的视角和多样的领域变换,旨在推动无人机技术在复杂环境中的应用。其核心研究问题是如何在不同视角和变换域中实现高效的无人机视觉识别与导航。DrIFT的发布不仅为无人机领域的研究提供了丰富的资源,还为跨域数据融合与处理提供了新的研究方向,对提升无人机自主性和环境适应性具有重要意义。
当前挑战
DrIFT数据集面临的挑战主要集中在数据融合与跨域适应性上。首先,如何有效整合真实与合成数据,确保数据质量与多样性,是一个技术难点。其次,灵活视角的引入增加了数据标注与处理的复杂性,要求算法具备更高的鲁棒性和适应性。此外,领域变换的多样性使得模型在不同环境下的泛化能力成为关键挑战。构建过程中,数据采集、标注及合成数据的生成与验证均需克服技术与资源上的限制,确保数据集的科学性与实用性。
常用场景
经典使用场景
在无人机自主导航与视觉感知领域,DrIFT数据集凭借其集成真实与合成数据、灵活视角及多领域变换的特性,成为研究者们探索无人机环境感知与决策的关键资源。该数据集通过提供多样化的视角和场景变换,使得研究者能够训练和验证无人机在复杂环境中的自主导航能力,尤其是在动态和多变的环境下,如城市、森林和开阔地带。
解决学术问题
DrIFT数据集有效解决了无人机自主导航中的多视角感知与环境适应性问题。通过集成真实与合成数据,该数据集为研究者提供了一个全面的实验平台,用于探索无人机在不同环境中的视觉感知和决策能力。此外,其多领域变换特性使得研究者能够模拟和解决无人机在实际应用中可能遇到的各种复杂场景,从而推动了无人机自主导航技术的学术研究进展。
衍生相关工作
基于DrIFT数据集,研究者们开展了多项经典工作,涵盖了无人机自主导航、视觉感知、环境适应性等多个领域。例如,有研究利用该数据集开发了基于深度学习的无人机路径规划算法,显著提升了无人机在复杂环境中的导航精度。此外,还有研究通过分析数据集中的多视角信息,提出了新的视觉感知模型,进一步增强了无人机在动态环境中的感知能力。这些衍生工作不仅丰富了无人机技术的研究内容,也为实际应用提供了理论支持。
以上内容由遇见数据集搜集并总结生成


