ObjectNav-HD
收藏arXiv2025-09-30 收录
下载链接:
https://ram81.github.io/projects/habitat-web
下载链接
链接失效反馈官方服务:
资源简介:
该数据集包含了从Matterport3D的56个训练场景中收集的7万个人类演示,旨在实现在未见环境中的指定对象类别导航任务。每个演示的平均步数为243步,其中目标对象类别在场景中相似或不存在。该数据集规模宏大,包含7万个演示,总计约1950万步的经验,所涉及的任务是对象目标导航。
This dataset consists of 70,000 human demonstrations collected from 56 training scenes of Matterport3D, intended for the task of object-goal navigation in unseen environments. Each demonstration has an average of 243 steps, where the target object category may be similar to or absent from the corresponding scene. This large-scale dataset includes 70,000 demonstrations, totaling approximately 19.5 million steps of navigational experience, with the covered task being object-goal navigation.
提供机构:
Matterport3D
搜集汇总
数据集介绍
背景与挑战
背景概述
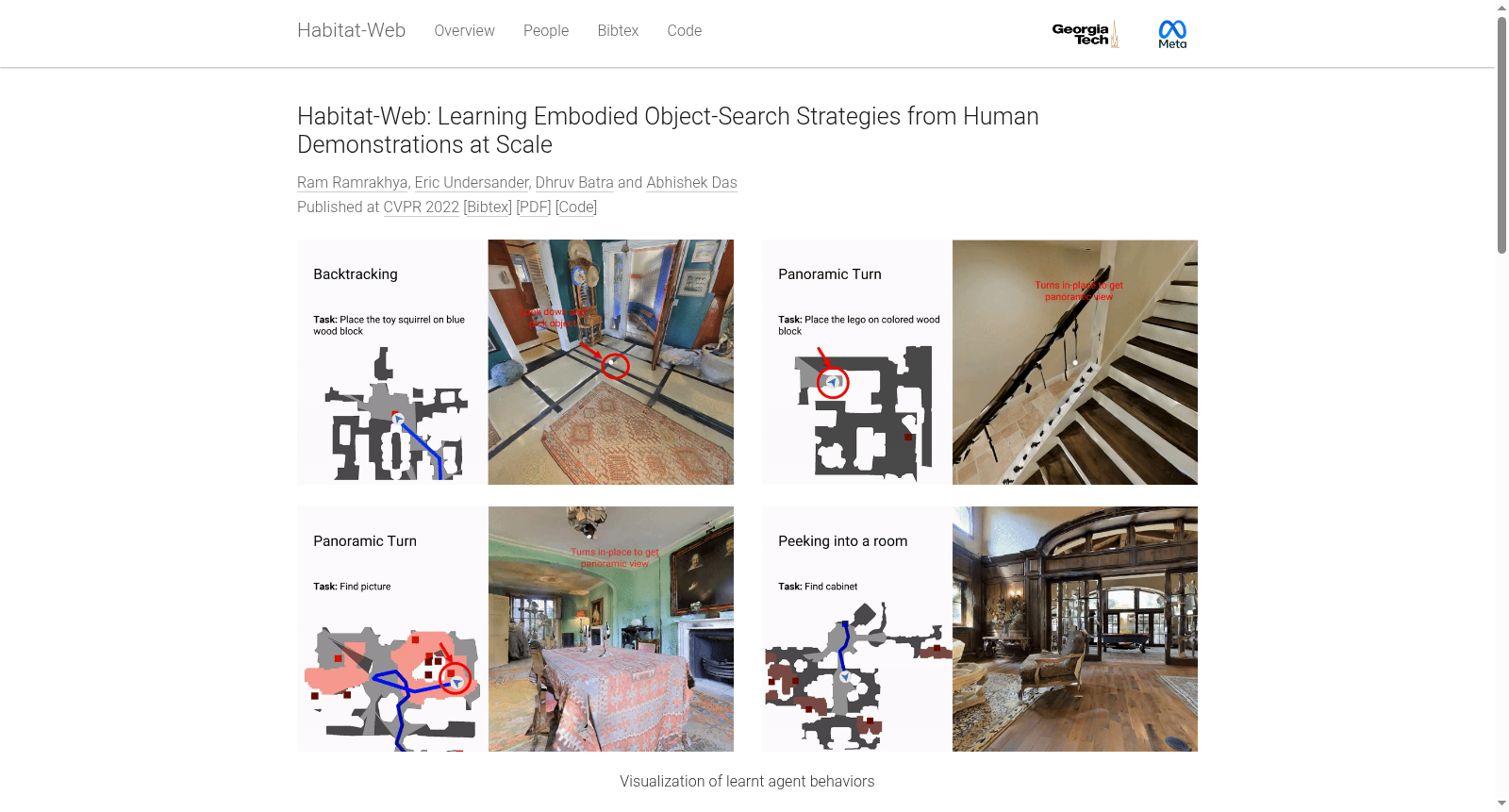
ObjectNav-HD是一个包含70,000个人类演示轨迹的数据集,用于物体目标导航任务,通过Habitat-Web基础设施收集。该数据集支持模仿学习研究,帮助虚拟机器人学习高效物体搜索行为,如窥探房间和检查角落,并在性能上优于基于强化学习的方法。
以上内容由遇见数据集搜集并总结生成


