GeoFlow-SLAM
收藏arXiv2025-03-18 更新2025-03-20 收录
下载链接:
https://github.com/NSN-Hello/GeoFlow-SLAM
下载链接
链接失效反馈官方服务:
资源简介:
GeoFlow-SLAM数据集是由Horizon Robotics和D-Robotics两家机构创建的,用于支持四足机器人动态环境中的SLAM研究。该数据集包含了RGBD相机和IMU采集的信息,旨在解决快速移动和视觉特征稀缺场景下的SLAM问题。通过结合几何一致性、四足里程计约束和双流光流(GeoFlow),GeoFlow-SLAM在无纹理环境中提高了定位的鲁棒性和准确性。数据集的具体大小、数据量等信息未在论文中明确描述,但提到数据集和代码将公开,以推动相关领域的研究工作。
The GeoFlow-SLAM dataset was developed by two institutions, Horizon Robotics and D-Robotics, to support SLAM research for quadruped robots in dynamic environments. This dataset contains data collected via RGBD cameras and IMUs, aiming to address SLAM challenges in scenarios involving rapid movement and scarce visual features. By integrating geometric consistency, quadruped odometry constraints, and dual optical flow (GeoFlow), GeoFlow-SLAM enhances the robustness and accuracy of localization in texture-free environments. Specific details such as the dataset size and total data volume are not explicitly described in the associated paper, but it is noted that the dataset and corresponding code will be made publicly available to advance research in relevant fields.
提供机构:
Horizon Robotics, Beijing, China; D-Robotics, Beijing, China
创建时间:
2025-03-18
搜集汇总
数据集介绍
构建方式
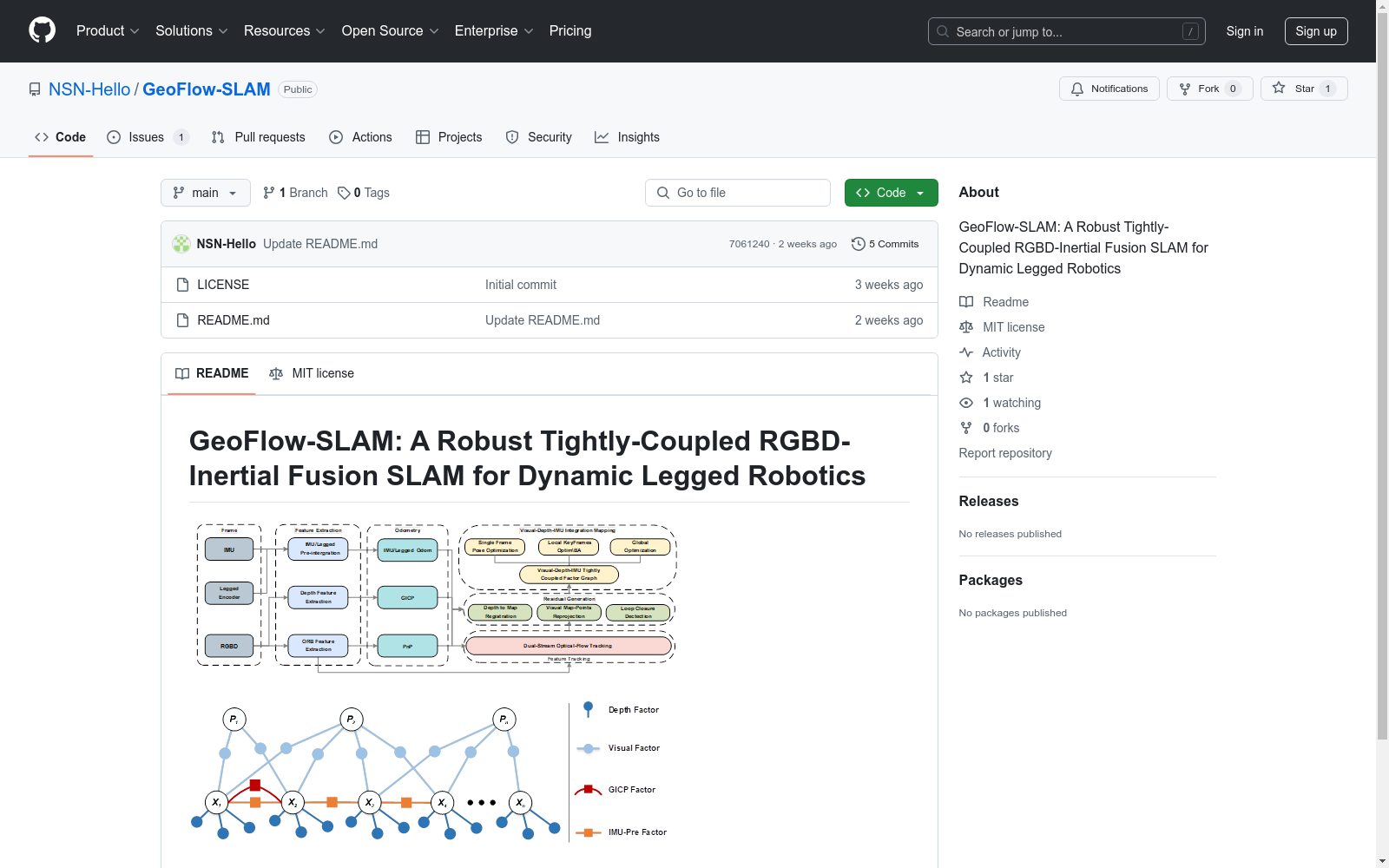
GeoFlow-SLAM数据集的构建基于RGB-D相机、IMU(惯性测量单元)以及腿式机器人的编码器数据。通过整合几何一致性、腿式里程计约束和双流光流(GeoFlow),该数据集在高度动态环境中实现了鲁棒的SLAM(同步定位与地图构建)。具体而言,数据采集过程中,RGB-D相机提供了RGB和深度信息,IMU和腿式编码器则用于捕捉机器人的运动状态。通过双流光流技术,结合先验地图点和姿态信息,显著提升了快速运动场景下的特征匹配能力。此外,数据集还引入了基于IMU/腿式里程计、帧间PnP(Perspective-n-Point)和GICP(Generalized Iterative Closest Point)的姿态初始化方法,确保了在快速运动和纹理缺失环境中的鲁棒性。
特点
GeoFlow-SLAM数据集的特点在于其高度动态环境下的鲁棒性和精确性。数据集通过双流光流技术显著提升了特征匹配的准确性,尤其是在快速运动场景下。此外,数据集引入了深度到地图的几何约束和GICP优化框架,进一步增强了在长时间运行和纹理缺失环境中的定位精度。数据集还包含了腿式机器人在复杂环境中的运动数据,能够有效应对快速运动抖动和IMU失真问题。这些特点使得GeoFlow-SLAM在动态环境下的表现优于现有的RGB-D SLAM系统。
使用方法
GeoFlow-SLAM数据集的使用方法主要围绕其多传感器融合的SLAM框架展开。用户可以通过RGB-D相机、IMU和腿式编码器的数据,结合双流光流技术和GICP优化框架,进行实时的定位与地图构建。具体步骤包括:首先,提取深度平面特征和ORB特征,并通过IMU/腿式里程计进行预积分;其次,利用GICP、PnP和IMU/腿式里程计进行姿态初始化;最后,通过视觉-深度-IMU紧耦合的因子图优化框架,进行单帧、局部关键帧和全局关键帧的优化。该数据集特别适用于腿式机器人在动态和纹理缺失环境中的定位与导航研究。
背景与挑战
背景概述
GeoFlow-SLAM数据集由北京地平线机器人和D-Robotics的研究团队于2024年提出,旨在解决四足机器人在高度动态环境中的视觉惯性SLAM问题。该数据集的核心研究问题是通过几何一致性、四足里程计约束和双流光流(GeoFlow)的结合,提升四足机器人在快速运动和无纹理场景中的定位精度与鲁棒性。GeoFlow-SLAM通过引入双流光流跟踪、基于IMU/四足里程计的位姿初始化方法以及深度到地图的几何约束优化框架,显著提升了SLAM系统的性能。该数据集在开源数据集和四足机器人采集数据上达到了业界领先水平,推动了四足机器人SLAM领域的研究与发展。
当前挑战
GeoFlow-SLAM数据集在解决四足机器人SLAM问题时面临多重挑战。首先,四足机器人在快速运动时会产生图像模糊和IMU失真,导致特征匹配和位姿初始化失败,尤其是在无纹理场景中,视觉特征的稀缺性进一步加剧了这一问题。其次,构建数据集时需应对四足机器人独特的运动特性,如速度变化和形态变化对IMU数据的干扰,这增加了数据采集和处理的复杂性。此外,如何在长时间运行的无纹理环境中保持系统的鲁棒性和精度,也是数据集构建中的关键挑战。GeoFlow-SLAM通过双流光流跟踪和深度到地图的几何约束优化,部分缓解了这些挑战,但仍需进一步研究以应对更复杂的动态环境。
常用场景
经典使用场景
GeoFlow-SLAM数据集在动态环境下的四足机器人定位与建图中展现了其经典应用场景。通过结合几何一致性、四足里程计约束和双流光流(GeoFlow),该数据集能够有效应对快速运动中的特征匹配失败、姿态初始化失败以及纹理缺失场景中的视觉特征稀缺问题。特别是在快速运动场景中,双流光流显著提升了特征匹配的准确性,结合先验地图点和姿态信息,确保了系统在复杂环境中的鲁棒性。
实际应用
GeoFlow-SLAM数据集在实际应用中,特别是在四足机器人的室内外导航与建图中展现了强大的实用性。例如,在纹理缺失的走廊、地下停车场以及户外广场等复杂环境中,该数据集能够通过深度信息和几何约束实现高精度的定位与建图。其双流光流跟踪机制有效应对了快速运动导致的图像模糊问题,确保了机器人在动态环境中的稳定运行。此外,该数据集还为机器人自主导航、环境探索等实际任务提供了可靠的技术支持。
衍生相关工作
GeoFlow-SLAM数据集的发布推动了多传感器融合SLAM系统的研究与发展。基于该数据集,许多经典工作得以衍生,例如结合LiDAR和视觉的紧耦合SLAM系统、面向纹理缺失环境的优化算法等。这些工作进一步扩展了GeoFlow-SLAM的应用范围,提升了其在复杂环境中的性能。此外,该数据集的开源特性也促进了学术界和工业界的广泛合作,推动了机器人定位与建图技术的持续进步。
以上内容由遇见数据集搜集并总结生成


