lerobot/unitreeh1_fold_clothes
收藏Hugging Face2025-02-20 更新2024-06-29 收录
下载链接:
https://hf-mirror.com/datasets/lerobot/unitreeh1_fold_clothes
下载链接
链接失效反馈官方服务:
资源简介:
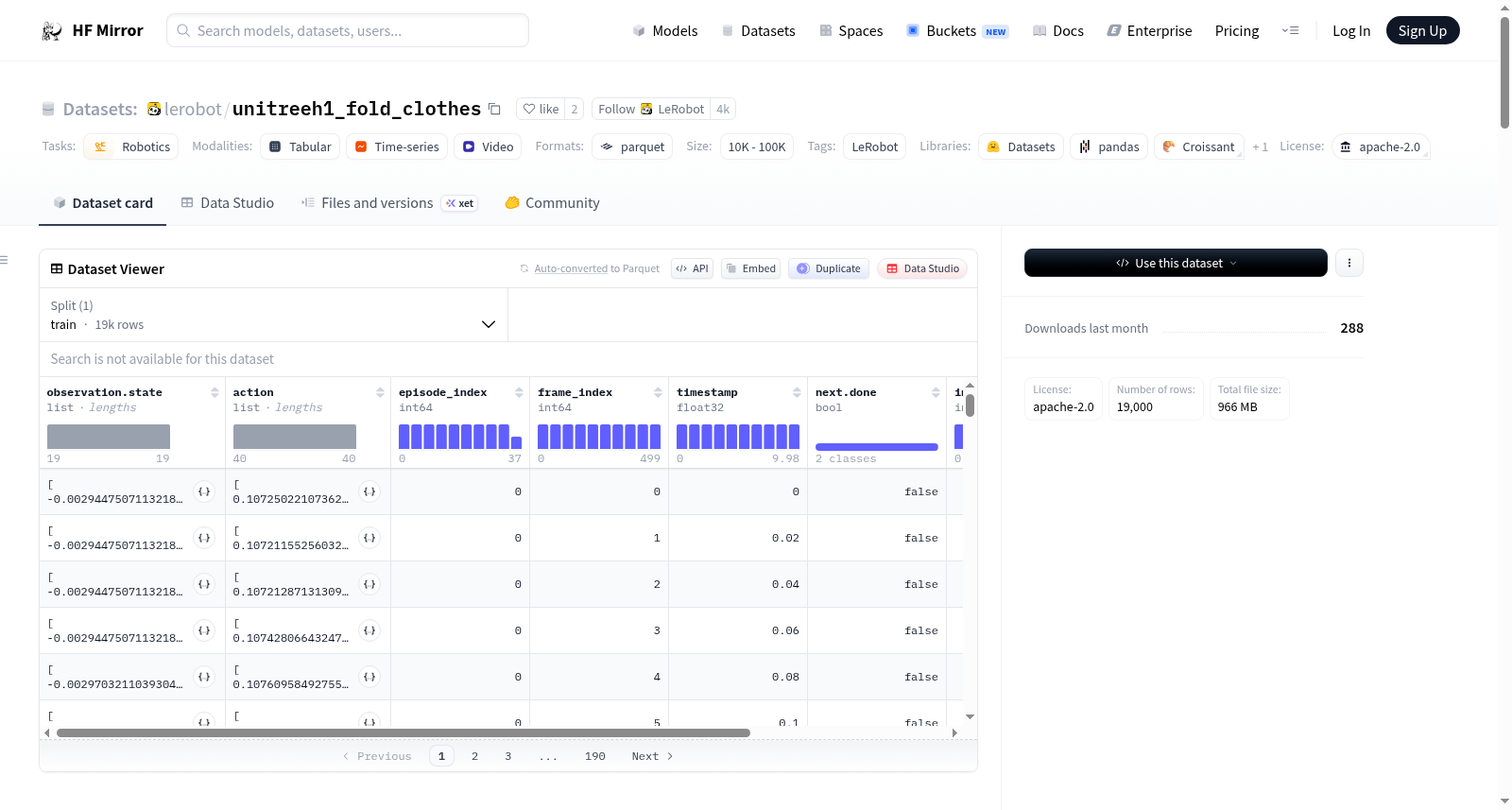
该数据集包含多个特征字段,包括左右摄像头的视频帧图像、观察状态、动作序列、episode索引、帧索引、时间戳、下一个状态是否完成标志以及索引。数据集被分割为训练集,包含19000个样本,总大小为7355375字节。
该数据集包含多个特征字段,包括左右摄像头的视频帧图像、观察状态、动作序列、episode索引、帧索引、时间戳、下一个状态是否完成标志以及索引。数据集被分割为训练集,包含19000个样本,总大小为7355375字节。
提供机构:
lerobot
原始信息汇总
数据集概述
数据集信息
特征
- observation.images.cam_left: 视频帧数据
- observation.images.cam_right: 视频帧数据
- observation.state: 序列数据,长度为19,数据类型为float32
- action: 序列数据,长度为40,数据类型为float32
- episode_index: 整数数据,数据类型为int64
- frame_index: 整数数据,数据类型为int64
- timestamp: 浮点数数据,数据类型为float32
- next.done: 布尔数据,数据类型为bool
- index: 整数数据,数据类型为int64
数据分割
- train: 包含19000个样本,总字节数为7355375
数据集大小
- 下载大小: 5521351字节
- 数据集大小: 7355375字节
配置
- config_name: default
- data_files:
- split: train
- path: data/train-*
- data_files:
搜集汇总
数据集介绍
背景与挑战
背景概述
该数据集是一个机器人折叠衣服的任务数据集,包含机器人的状态观测、动作、时间戳和视频数据,适用于机器人控制和视觉任务的研究。数据集规模为19,000行,总文件大小为966MB,采用Apache 2.0许可证。
以上内容由遇见数据集搜集并总结生成


