VIMA
收藏github2025-03-21 收录
下载链接:
https://vimalabs.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
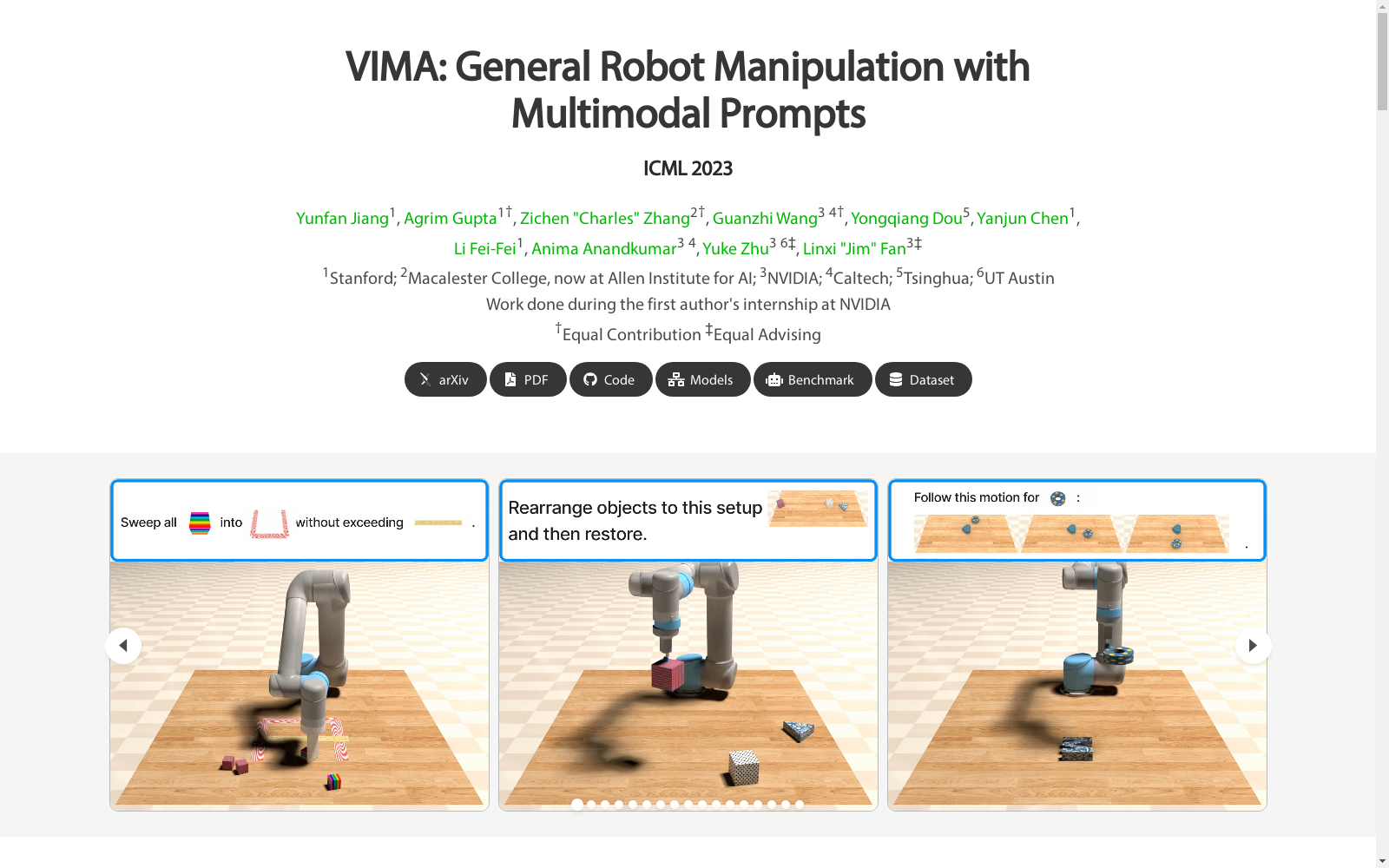
VIMA-BENCH 是由斯坦福大学、NVIDIA 等机构联合开发的多模态机器人操作任务基准数据集,旨在推动机器人在多样化任务中的泛化能力研究。该数据集基于 Ravens 模拟器构建,包含 17 个任务模板,涵盖简单物体操作、视觉目标达成、新概念理解、单次视频模仿、视觉约束满足和视觉推理等六类任务。通过程序化生成,可扩展出数千个任务实例,搭配多模态提示,包括文本、图像和视频帧,为机器人提供丰富的任务描述形式。数据集包含 600K+ 专家轨迹,用于模仿学习,涵盖多种任务场景和操作方式。其创建过程充分考虑了任务多样性和泛化能力测试,设计了从随机化物体放置到全新任务的四层评估协议,系统性地衡量机器人在不同难度下的零样本泛化能力。VIMA-BENCH 主要应用于机器人学习领域,致力于解决机器人在面对多样化任务时的泛化难题,使机器人能够通过少量示例快速适应新任务,提升其在复杂环境中的适应性和灵活性。
VIMA-BENCH is a multimodal robotic manipulation task benchmark dataset jointly developed by Stanford University, NVIDIA and other institutions, aiming to advance research on the generalization capability of robots across diverse tasks. Built on the Ravens simulator, this dataset includes 17 task templates covering six categories of tasks: simple object manipulation, visual goal achievement, novel concept understanding, one-shot video imitation, visual constraint satisfaction, and visual reasoning. Generated through procedural methods, it can be scaled to produce thousands of task instances, and is equipped with multimodal prompts including text, images and video frames to provide rich task description modalities for robotic systems. The dataset contains over 600,000 expert trajectories for imitation learning, covering a wide range of task scenarios and manipulation approaches. Its development fully accounts for task diversity and generalization capability testing, and designs a four-layer evaluation protocol spanning from randomized object placement to entirely novel tasks, which systematically evaluates the zero-shot generalization ability of robots across varying difficulty levels. VIMA-BENCH is primarily applied in the field of robotic learning, dedicated to addressing the generalization challenges of robots when facing diverse tasks, enabling robots to rapidly adapt to new tasks with limited demonstrations, and enhancing their adaptability and flexibility in complex environments.
提供机构:
斯坦福大学
搜集汇总
数据集介绍
构建方式
VIMA数据集的构建基于多模态交互任务的设计,旨在模拟真实世界中的复杂操作场景。数据采集过程中,研究人员通过虚拟环境生成器创建了多样化的任务场景,涵盖了从简单到复杂的操作序列。每个任务场景均包含视觉、动作和语言指令的多模态数据,确保数据集的多样性和丰富性。数据标注通过半自动化工具完成,结合人工校验,保证了数据的准确性和一致性。
使用方法
使用VIMA数据集时,研究人员可通过加载预定义的任务场景数据,提取视觉、动作和语言指令的多模态信息。数据集支持多种格式的数据读取,便于与深度学习框架集成。用户可根据研究需求,选择特定任务或组合多个任务进行实验。数据集中提供的标注信息可用于训练和验证多模态模型,例如视觉-语言联合建模或动作预测。此外,数据集还提供了评估工具,便于对模型性能进行定量分析。
背景与挑战
背景概述
VIMA数据集是一个专注于视觉与语言多模态任务的数据集,旨在推动视觉与语言交互领域的研究。该数据集由一支跨学科研究团队于2022年创建,主要研究人员来自顶尖人工智能实验室和大学。VIMA的核心研究问题在于如何通过多模态数据(如图像、文本和视频)实现更高效的语义理解和任务执行。该数据集的发布为视觉问答、图像描述生成以及多模态推理等任务提供了丰富的资源,显著提升了相关领域的研究水平。
当前挑战
VIMA数据集在解决多模态任务时面临诸多挑战。首先,多模态数据的对齐与融合是一个关键问题,如何有效地将图像、文本和视频信息整合以实现精确的语义理解仍需深入研究。其次,数据集的构建过程中,高质量的多模态数据采集与标注耗费了大量资源,且需要克服数据噪声和不一致性等问题。此外,多模态任务的复杂性使得模型的泛化能力和鲁棒性成为重要挑战,如何在多样化场景中保持高性能仍是一个亟待解决的问题。
常用场景
经典使用场景
VIMA数据集广泛应用于视觉与语言交互任务的研究中,特别是在多模态学习领域。研究者利用该数据集进行视觉问答、图像描述生成以及视觉推理等任务的模型训练与评估。通过结合视觉和语言信息,VIMA为开发能够理解和生成自然语言描述的智能系统提供了丰富的实验数据。
解决学术问题
VIMA数据集解决了多模态学习中的关键问题,如视觉与语言的对齐、跨模态信息的融合以及复杂场景的理解。通过提供高质量的标注数据,VIMA帮助研究者开发出能够同时处理视觉和语言信息的模型,推动了多模态人工智能的发展。
实际应用
在实际应用中,VIMA数据集被用于开发智能助手、自动驾驶系统以及医疗影像分析工具。这些应用场景需要系统能够准确理解视觉信息并生成相应的语言描述,VIMA数据集为这些系统的训练和优化提供了重要支持。
数据集最近研究
最新研究方向
在机器人操作与视觉感知领域,VIMA数据集的最新研究方向聚焦于多模态学习与任务泛化能力的提升。通过整合视觉、语言和动作数据,研究者们致力于开发能够理解和执行复杂指令的智能系统。近期,基于VIMA的研究在零样本学习和跨领域任务迁移方面取得了显著进展,特别是在家庭服务机器人和工业自动化场景中的应用。这些研究不仅推动了机器人自主决策能力的发展,还为多模态人工智能系统的实际部署提供了重要参考。VIMA数据集的开放共享,进一步加速了相关技术的创新与突破,为未来智能机器人的普及奠定了坚实基础。
以上内容由遇见数据集搜集并总结生成


