NL2SpaTiaL
收藏arXiv2025-12-16 更新2025-12-17 收录
下载链接:
https://sites.google.com/view/nl2spatial
下载链接
链接失效反馈官方服务:
资源简介:
NL2SpaTiaL数据集由加利福尼亚大学河滨分校和利哈伊大学团队构建,旨在解决机器人操作任务中自然语言与时空逻辑的语义对齐问题。该数据集通过自动化框架生成,包含自然语言指令与分层SpaTiaL逻辑规范的配对,覆盖几何空间关系(如接近、方位、包含)及时间约束。数据生成采用确定性回译流程,确保语言与逻辑的精确映射,适用于机器人指令理解、可解释性规划及时空推理研究,显著提升了复杂操作任务的组合式语义 grounding 能力。
The NL2SpaTial dataset was constructed by teams from the University of California, Riverside and Lehigh University, aiming to address the semantic alignment issue between natural language and spatio-temporal logic in robotic manipulation tasks. Generated via an automated framework, the dataset contains pairs of natural language instructions and hierarchical spatial logical specifications, covering geometric spatial relationships such as proximity, orientation, and containment, as well as temporal constraints. The dataset utilizes a deterministic back-translation workflow during the generation process to ensure precise alignment between language and logic, making it suitable for research on robotic instruction understanding, explainable planning, and spatio-temporal reasoning, and significantly enhancing the compositional semantic grounding capabilities for complex manipulation tasks.
提供机构:
加利福尼亚大学河滨分校, 利哈伊大学
创建时间:
2025-12-16
原始信息汇总
NL2SpaTiaL 数据集概述
数据集名称
NL2SpaTiaL
核心目标
生成用于机器人操作任务的几何时空逻辑(SpaTiaL)规范,并将其与自然语言描述对齐。
关键特性
- 逻辑形式:基于SpaTiaL(Spatio-Temporal Logic),这是一种用于表达物体、区域和机器人轨迹上几何感知关系和时序约束的时空逻辑。
- 数据集内容:包含自然语言指令与结构化SpaTiaL规范配对的数据集(NL-SpaTiaL数据集)。
- 结构化表示:数据实例包含分层注释,将语言片段与对应逻辑树中的节点对齐,而非扁平公式。
- 生成方法:通过确定性、保持语义的回译过程,将SpaTiaL规范转换为自然语言描述。
- 支持任务:支持分层指令理解和逐步监督。
数据集生成流程
- 规范生成:将自然语言指令分解为分层逻辑树(HLT),其中节点代表与特定语言跨度对齐的子意图。
- 基础化:将层次结构中的叶节点基础化为由物体、区域和时间窗口参数化的SpaTiaL原语。
- 组合:使用逻辑和时序运算符组合基础化的子公式,形成最终的SpaTiaL规范。
- 回译:通过受控、确定性的过程将结构化SpaTiaL规范转换回自然语言,确保语言与逻辑在各个层面的一致性。
- 多样化:使用大语言模型生成多样化的释义,同时保留底层语义。
应用与评估
- 应用环境:在多个机器人操作环境中进行评估,包括原始SpaTiaL基准环境、ReKep(多任务操作场景套件)和openpi0环境。
- 使用方式:视觉语言动作模型可以生成多个候选轨迹,使用SpaTiaL规范进行评估,以识别最一致和可靠的执行方案。
相关资源
- 论文:标题为“NL2SpaTiaL: Generating Geometric Spatio-Temporal Logic Specifications from Natural Language for Manipulation Tasks”。
- 作者:Luo, Licheng; Xia, Yu; Liang, Kaier; Cai, Mingyu。
- 出处:arXiv preprint arXiv:2512.13670 (2025)。
- 论文地址:https://arxiv.org/abs/2512.13670
- 代码状态:即将发布。
搜集汇总
数据集介绍
构建方式
在机器人操作领域,将自然语言指令精确转化为形式化逻辑表示是提升任务执行可靠性的关键挑战。NL2SpaTiaL数据集的构建采用了一种逻辑优先的合成框架,首先生成具有层次结构的时空逻辑公式骨架,随后通过确定性的语义保持回译过程,将每个逻辑节点转换为规范的自然语言描述。该流程确保了从高层任务目标到原子空间谓词的逐层对齐,并通过大型语言模型进行语言多样化以增强数据集的表达丰富性,最终形成了逻辑公式、规范描述及多样化文本变体紧密对应的数据对。
使用方法
在机器人学与形式化方法的交叉研究中,NL2SpaTiaL数据集为训练和评估自然语言到时空逻辑的翻译模型提供了标准基准。研究者可利用其层次对齐的数据结构,开发能够理解复杂操作指令、并生成可解释、可验证的SpaTiaL规范的模型。具体而言,该数据集支持对翻译模型进行端到端训练,也可用于分阶段监督学习,例如先识别高层任务结构,再逐步细化生成空间谓词。此外,其内置的语义对齐信息可用于构建翻译-验证框架,确保生成的形式化规范忠实于原始语言指令的语义。
背景与挑战
背景概述
在语言条件机器人学领域,将自然语言指令精确地映射为结构化空间推理形式,一直是核心挑战。传统时序逻辑虽能刻画任务序列与安全约束,却难以表达机器人操作任务所依赖的几何空间关系。为填补这一空白,加州大学河滨分校与利哈伊大学的研究团队于2025年提出了NL2SpaTiaL数据集。该数据集旨在构建自然语言与时空逻辑(SpaTiaL)规范之间的对齐关系,其核心研究问题聚焦于如何从自然语言指令中生成具有层次化结构的几何时空逻辑规范,以支持机器人操作任务中对象位置、邻域关系、姿态约束等精细空间需求的表达。该工作通过引入确定性语义保持的回译流程,生成了首个大规模对齐自然语言与多层次空间关系的基准,为提升机器人指令跟随的可解释性与可验证性提供了关键数据基础。
当前挑战
NL2SpaTiaL数据集致力于解决机器人操作任务中自然语言到形式化逻辑的翻译难题,其核心挑战在于如何精确捕捉并表达指令中复杂的几何空间关系与时间演化。具体而言,所解决的领域问题挑战包括:克服大型语言模型在生成精确空间结构和时序依赖上的不足,避免产生语义正确但违反几何或顺序约束的动作规划;同时,需将人类指令固有的层次化结构(如高层目标分解为子目标和细粒度约束)映射为可组合、可解释的逻辑公式。在构建过程中,面临的挑战则体现为:如何设计一个可扩展的框架,以合成涵盖组合性空间关系的SpaTiaL规范,并确保通过回译生成的自然语言描述与逻辑语义严格对齐;此外,还需应对空间关系以组合方式相互作用可能带来的逻辑矛盾或几何不可行布局,从而生成高质量、语义一致的数据对。
常用场景
经典使用场景
在机器人操作任务的自然语言指令形式化领域,NL2SpaTiaL数据集提供了将复杂的人类指令转换为时空逻辑规范的经典应用场景。该数据集通过其层次化逻辑树结构,将诸如“先将红色方块放入分拣区,然后在10秒内确保其位于蓝色方块左侧”的复合指令,系统性地分解为一系列几何空间谓词与时间算子的组合。这种结构化转换使得机器人能够超越语言本身的模糊性,对物体位置、邻接关系、姿态约束等关键几何要素进行精确推理,为后续的规划与控制提供了可验证的语义基础。
解决学术问题
该数据集核心解决了机器人学与形式化方法交叉领域的一个关键学术问题:如何将富含几何空间关系与时间依赖的自然语言指令,无歧义地转换为机器可执行且可验证的形式化规范。传统时序逻辑方法仅能刻画机器人轨迹,而忽略了物体层面的空间交互。NL2SpaTiaL通过引入时空逻辑,并构建层次化的语义对齐数据,使得模型能够同时学习时间顺序与多层次空间关系(如接触、包含、左右方位等)的组合结构。这为语言条件机器人实现可解释、可组合的指令遵循奠定了数据基础,弥合了自然语言表达与机器人精确几何推理之间的语义鸿沟。
实际应用
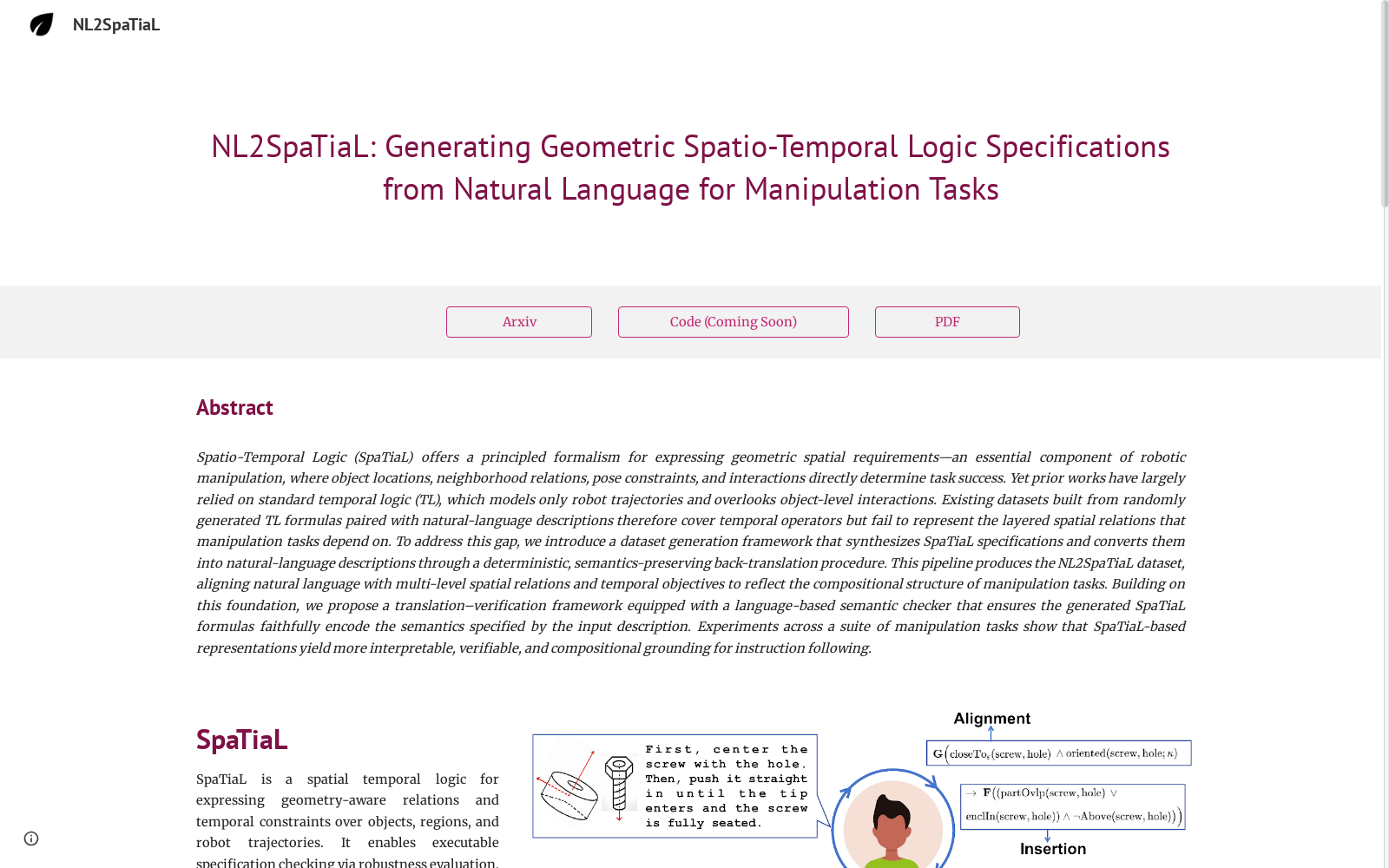
该数据集的实际应用场景主要集中于需要高精度空间理解和时序协调的智能机器人操作任务。例如,在工业装配线上,操作员下达“将螺丝对准孔洞中心,然后垂直推入直至完全贴合”的指令,系统可利用NL2SpaTiaL生成的SpaTiaL规范,实时监控螺丝与孔洞的对齐度、插入深度等几何约束的满足情况。在家庭服务机器人场景中,诸如“将水杯放在餐盘上,并确保在移动过程中远离障碍物”的复杂指令,也能被转化为包含空间关系与安全约束的形式化规范,从而指导机器人生成安全、可靠的动作序列。
数据集最近研究
最新研究方向
在机器人操作领域,自然语言指令与精确几何时空逻辑的语义对齐是提升任务执行可靠性的核心挑战。NL2SpaTiaL数据集通过引入层次化逻辑树结构与语义一致性检查机制,将自然语言指令转化为可解释、可验证的时空逻辑规范,有效弥补了传统时序逻辑在表达复杂空间关系上的不足。该数据集推动了基于大语言模型的神经符号推理研究,促进了形式化方法与具身智能的深度融合,为机器人理解并执行包含多层空间约束与时间依赖的复杂操作指令提供了结构化基准。
相关研究论文
- 1NL2SpaTiaL: Generating Geometric Spatio-Temporal Logic Specifications from Natural Language for Manipulation Tasks加利福尼亚大学河滨分校, 利哈伊大学 · 2025年
以上内容由遇见数据集搜集并总结生成


