VKITTI3D Dataset
收藏github2024-01-05 更新2024-05-31 收录
下载链接:
https://github.com/VisualComputingInstitute/vkitti3D-dataset
下载链接
链接失效反馈官方服务:
资源简介:
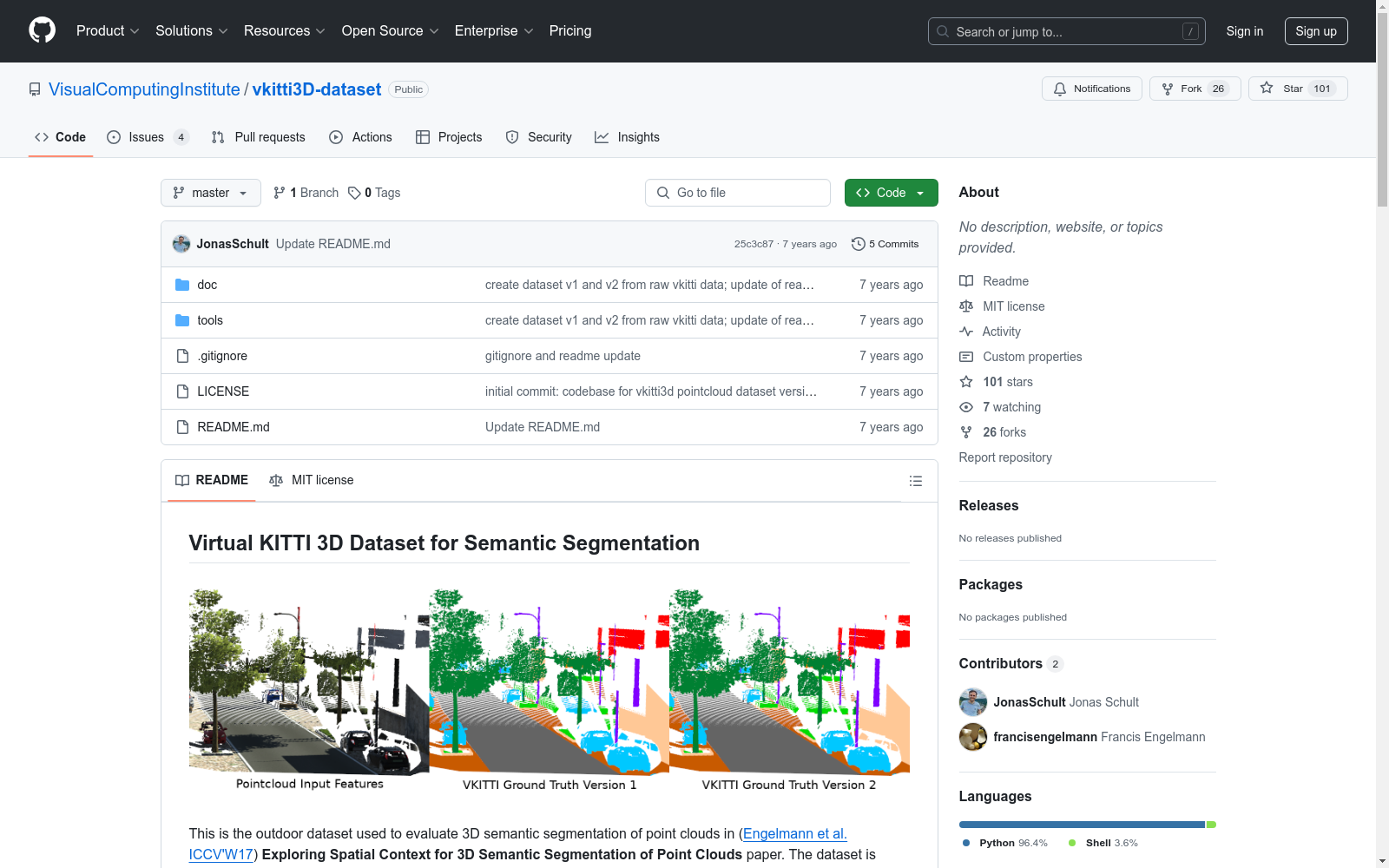
用于评估户外场景中点云的三维语义分割的数据集,直接衍生自Virtual KITTI Dataset。数据集包含多种场景和对象,用于研究和开发三维视觉技术。
A dataset for evaluating 3D semantic segmentation of point clouds in outdoor scenes, directly derived from the Virtual KITTI Dataset. The dataset encompasses a variety of scenes and objects, intended for research and development in 3D vision technologies.
创建时间:
2018-10-01
原始信息汇总
数据集概述
- 名称: Virtual KITTI 3D Dataset for Semantic Segmentation
- 用途: 用于评估户外场景的3D语义分割点云数据
- 来源: 直接衍生自Virtual KITTI Dataset (v.1.3.1)
- 版本: 主要使用版本1,版本2正在更新中
数据集下载
- 版本1: VKITTI3D Dataset v1
- 版本2: VKITTI3D Dataset v2 (即将发布)
数据集生成
- 步骤:
- 从Virtual KITTI Website下载并提取原始数据
- 使用
create_npy.py脚本将原始数据转换为numpy文件 - 使用
create_sets.py脚本创建数据集分割
数据格式
- 文件类型: numpy
.npy文件 - 数据结构: 每个文件包含一个
N x F矩阵,其中N是场景中的点数,F=7是每个点的特征数 - 特征:
XYZRGBL,包括3D位置XYZ,颜色RGB和语义标签L
标签信息
| Label ID | Semantics | RGB | Color |
|---|---|---|---|
| 0 | Terrain | [200, 90, 0] | brown |
| 1 | Tree | [0, 128, 50] | dark green |
| 2 | Vegetation | [0, 220, 0] | bright green |
| 3 | Building | [255, 0, 0] | red |
| 4 | Road | [100, 100, 100] | dark gray |
| 5 | GuardRail | [200, 200, 200] | bright gray |
| 6 | TrafficSign | [255, 0, 255] | pink |
| 7 | TrafficLight | [255, 255, 0] | yellow |
| 8 | Pole | [128, 0, 255] | violet |
| 9 | Misc | [255, 200, 150] | skin |
| 10 | Truck | [0, 128, 255] | dark blue |
| 11 | Car | [0, 200, 255] | bright blue |
| 12 | Van | [255, 128, 0] | orange |
| 13 | Dont care | [0, 0, 0] | black |
训练与评估
- 方法: 使用6-fold交叉验证进行模型训练和评估
- 评估指标: 平均交并比(IoU),总体准确率,平均类别准确率
数据集生成细节
- 分割方法: 将原始序列分割为非重叠的子序列,每个子序列选择15个场景/帧
- 版本2更新: 修复了版本1中由于错误的车辆窗户深度导致的投影错误,并引入新的语义类别“Dont care”以提高数据质量
搜集汇总
数据集介绍
构建方式
VKITTI3D数据集基于Virtual KITTI Dataset(v.1.3.1)构建,旨在评估点云的3D语义分割任务。数据集的生成过程包括从Virtual KITTI网站下载原始数据,并通过脚本将其转换为numpy格式的文件。为了确保数据的多样性和非重叠性,原始序列被分割为多个子序列,并在每个子序列中选取15个等距时间步长的场景帧。此外,数据集还通过6折交叉验证的方式进行划分,以支持模型的训练与评估。
特点
VKITTI3D数据集以点云形式呈现,每个点包含7个特征,分别是3D坐标(XYZ)、RGB颜色信息以及语义标签(L)。数据集涵盖了多种语义类别,如地形、树木、建筑物、道路等,共计13类。特别地,版本2中引入了“don't care”类别,用于修正因车窗深度投影错误导致的标签问题,进一步提升了数据集的标注质量。此外,数据集提供了详细的RGB颜色与语义标签的对应关系,便于用户直观理解数据。
使用方法
使用VKITTI3D数据集时,用户需首先下载并解压原始数据,随后通过提供的脚本将其转换为numpy格式。数据集支持6折交叉验证,用户可根据需求划分训练集与测试集。加载数据时,可通过numpy库读取.npy文件,获取点云的特征矩阵。此外,数据集还提供了可视化工具,用户可通过安装相关依赖并运行脚本,查看点云的RGB信息及语义标签。在模型训练与评估中,建议采用平均交并比(IoU)、整体准确率及类别平均准确率作为评价指标。
背景与挑战
背景概述
VKITTI3D数据集是专为点云三维语义分割任务而设计的户外场景数据集,由Engelmann等人在2017年ICCV会议上首次提出。该数据集基于Virtual KITTI Dataset(v1.3.1)构建,旨在通过虚拟环境生成的高质量数据,推动三维语义分割算法的研究与应用。其核心研究问题在于如何有效利用空间上下文信息,提升点云数据的语义分割精度。VKITTI3D数据集不仅为学术界提供了标准化的评估基准,还通过其丰富的场景和多样化的语义标签,显著推动了自动驾驶、机器人导航等领域的发展。
当前挑战
VKITTI3D数据集在解决三维语义分割问题时面临多重挑战。首先,点云数据的稀疏性和不规则性使得模型难以捕捉完整的空间上下文信息,从而影响分割精度。其次,数据集中存在标签噪声,尤其是车辆玻璃等透明物体导致的错误标签,进一步增加了模型训练的难度。在数据集构建过程中,研究人员还需克服虚拟环境与真实场景之间的差异,确保生成数据的真实性和多样性。此外,如何高效处理大规模点云数据并优化计算资源,也是该领域亟待解决的技术难题。
常用场景
经典使用场景
VKITTI3D数据集在3D语义分割领域具有广泛的应用,特别是在自动驾驶和机器人导航系统中。该数据集通过提供丰富的点云数据,帮助研究人员开发和评估复杂的3D语义分割算法。其经典使用场景包括在虚拟环境中模拟真实世界的道路和建筑物,从而为自动驾驶系统提供高精度的环境感知能力。
衍生相关工作
VKITTI3D数据集衍生了许多经典的研究工作,特别是在3D语义分割和点云处理领域。例如,基于该数据集的Engelmann等人的研究提出了利用空间上下文信息进行3D语义分割的创新方法。此外,该数据集还启发了许多后续研究,如点云特征提取和语义分割算法的优化,进一步推动了3D视觉技术的发展。
数据集最近研究
最新研究方向
在自动驾驶与计算机视觉领域,VKITTI3D数据集作为虚拟KITTI数据集的三维扩展,近年来在点云语义分割研究中扮演了重要角色。该数据集通过模拟真实世界的复杂场景,为研究者提供了丰富的三维点云数据,涵盖了地形、植被、建筑物、道路等多种语义类别。当前的研究热点主要集中在如何利用空间上下文信息提升点云语义分割的精度与鲁棒性。随着深度学习技术的快速发展,基于VKITTI3D的模型训练与评估方法不断优化,特别是在多尺度特征提取与上下文建模方面取得了显著进展。此外,数据集的最新版本V2通过修正投影误差并引入‘无关类’标签,进一步提升了数据质量,为更精确的语义分割任务提供了可靠的基础。这些研究不仅推动了自动驾驶环境感知技术的发展,也为虚拟现实与增强现实等领域的应用提供了重要参考。
以上内容由遇见数据集搜集并总结生成


