UniOcc
收藏arXiv2025-04-01 更新2025-04-03 收录
下载链接:
https://huggingface.co/datasets/tasl-lab/uniocc
下载链接
链接失效反馈官方服务:
资源简介:
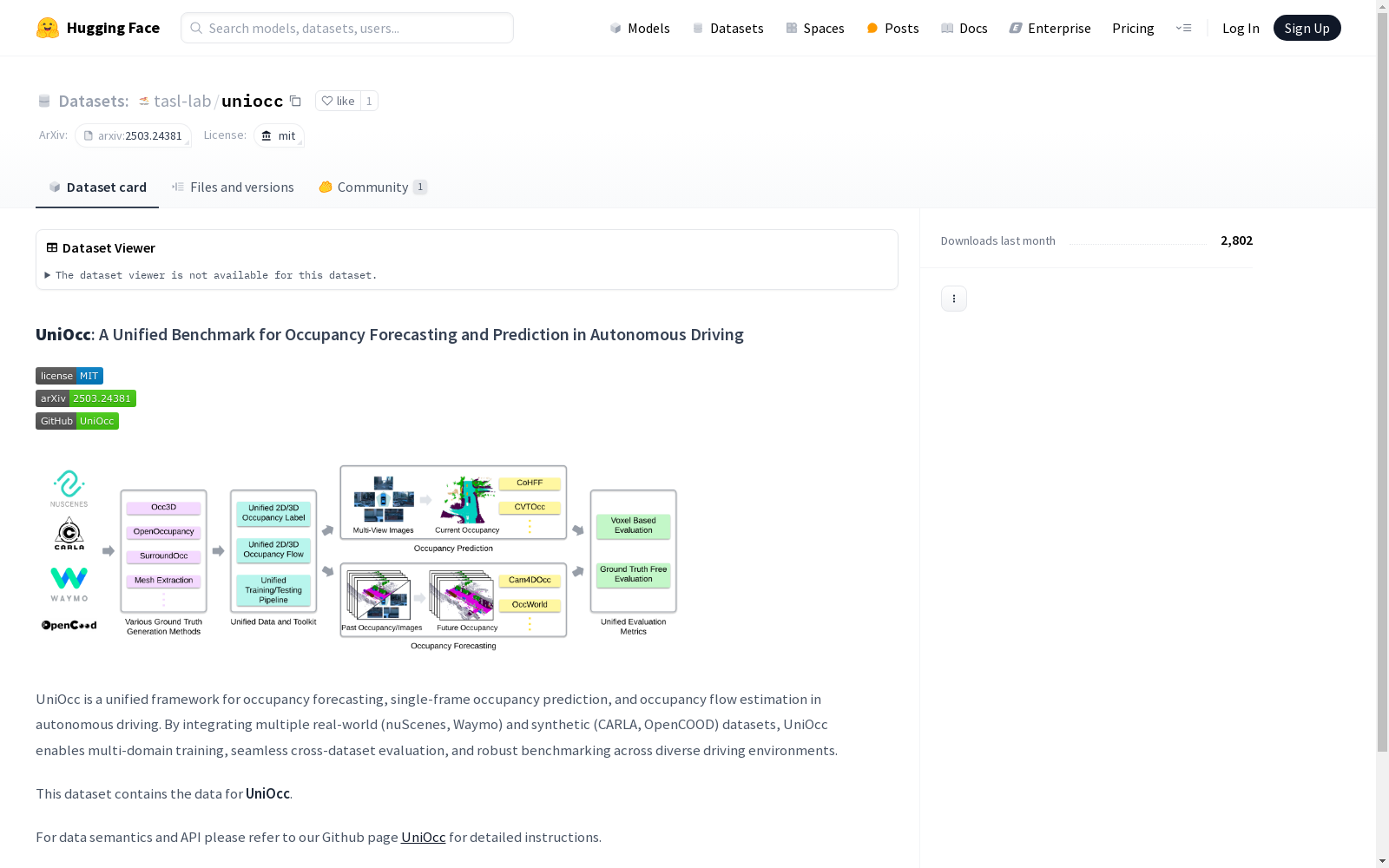
UniOcc是一个综合统一的车载占用预测和当前帧占用预测基准,它统一了来自多个现实世界数据集(如nuScenes、Waymo)和高保真驾驶模拟器(如CARLA、OpenCOOD)的数据。该数据集提供了2D/3D占用标签和每体素流注解,支持合作自动驾驶。数据集包含了丰富的场景类型和多样的采样率,适用于多种占用任务,如占用预测和占用预测。
UniOcc is a comprehensive and unified benchmark for both in-vehicle occupancy prediction and current-frame occupancy prediction. It unifies data from multiple real-world datasets (e.g., nuScenes, Waymo) and high-fidelity driving simulators (e.g., CARLA, OpenCOOD). This dataset provides 2D/3D occupancy labels and per-voxel flow annotations, supporting cooperative autonomous driving. The dataset features rich scene types and diverse sampling rates, making it applicable to various occupancy-related tasks such as occupancy prediction and occupancy prediction.
提供机构:
加州大学河滨分校, 威斯康星大学麦迪逊分校, 德克萨斯A&M大学
创建时间:
2025-04-01
搜集汇总
数据集介绍
构建方式
UniOcc数据集通过整合多个真实世界数据集(如nuScenes、Waymo)和高保真驾驶模拟器(如CARLA、OpenCOOD)构建而成,提供了2D/3D占用标签以及每个体素的流动注释。数据集采用统一的格式,支持协作式自动驾驶。其构建过程包括从多个伪标签生成管道(如Occ3D、OpenOccupancy和SurroundOcc)合成占用地面真实值,以增强标签的多样性和鲁棒性。此外,数据集还通过模拟引擎生成无限多样的虚拟驾驶场景,以提供完美的3D占用标签。
特点
UniOcc数据集的特点在于其全面性和统一性。它不仅提供了2D/3D占用标签,还包含了每个体素的流动信息,这在现有数据集中是罕见的。数据集支持多种任务,包括占用预测、占用预测以及流动估计。此外,UniOcc还引入了不依赖于地面真实标签的新型评估指标,能够更全面地评估占用质量。数据集的多源整合特性使其能够覆盖更广泛的场景和运动模式,从而提升了模型的跨域泛化能力。
使用方法
UniOcc数据集的使用方法灵活多样,适用于多种占用相关任务。用户可以通过统一的训练和测试管道进行跨数据集训练,只需简单命令即可实现。数据集支持当前帧占用预测任务,模型可以基于历史相机帧预测当前3D占用网格。此外,数据集还支持占用预测任务,模型可以基于历史占用网格或相机图像预测未来占用情况。对于协作式自动驾驶,数据集提供了多车辆协作场景,支持共享传感器观测和中间特征,以增强场景理解。用户还可以利用数据集提供的工具包进行对象分割和跟踪,以支持更高级的任务如形状分析或运动规划。
背景与挑战
背景概述
UniOcc是由加州大学河滨分校、威斯康星大学麦迪逊分校和德州农工大学的研究团队于2025年提出的自动驾驶领域创新性基准数据集。该数据集通过整合nuScenes、Waymo等真实驾驶数据与CARLA、OpenCOOD高保真仿真数据,首次实现了2D/3D占据栅格预测与占据流预测任务的统一评估框架。其核心研究价值在于解决了动态环境建模中时空连续性的表征难题,通过体素级运动流标注和协同驾驶支持,为占据栅格地图在运动规划、端到端驾驶系统等关键应用提供了标准化评估体系。该数据集通过引入不依赖真实标签的评估指标,显著提升了占据预测模型在跨域泛化能力验证方面的可靠性,已成为自动驾驶环境理解领域的重要基准。
当前挑战
UniOcc面临的挑战主要体现在两方面:在领域问题层面,现有占据预测方法受限于单数据集训练导致的域适应性问题,不同传感器配置与标注标准使得模型难以跨数据集迁移;同时传统基于LiDAR点云启发的伪标签存在表面反射局限,无法准确反映真实3D占据空间。在构建过程层面,数据集需解决多源数据时空对齐难题,包括仿真与真实数据的语义一致性映射、不同采样频率数据的时序同步等问题。此外,体素级运动流标注需要精确计算复杂场景中旋转与平移的复合运动,这对多目标跟踪算法的鲁棒性提出了极高要求。协同占据预测中多车视角的时空注册误差,也增加了数据融合的复杂度。
常用场景
经典使用场景
UniOcc数据集在自动驾驶领域中被广泛用于3D占用预测和占用预测任务。通过整合来自nuScenes、Waymo等真实世界数据集和CARLA、OpenCOOD等高保真驾驶模拟器的数据,UniOcc提供了一个统一的基准,支持从历史信息预测未来占用情况以及从相机图像预测当前帧的占用情况。该数据集特别适用于多视角图像处理和3D场景重建任务,为自动驾驶系统提供了丰富的环境感知能力。
实际应用
在实际应用中,UniOcc数据集为自动驾驶系统的环境感知和路径规划提供了重要支持。其多源数据整合和统一的训练/测试流程使得模型能够在不同传感器配置和数据格式的场景中无缝切换。此外,UniOcc的逐体素流注释为动态场景中的物体跟踪和运动预测提供了关键信息,进一步增强了自动驾驶系统在复杂环境中的鲁棒性和安全性。
衍生相关工作
UniOcc数据集衍生了许多经典工作,例如OccWorld和Cam4DOcc等占用预测和预测模型。这些工作利用UniOcc的统一数据格式和评估工具,进一步推动了自动驾驶领域的研究。特别是,OccWorld通过结合UniOcc提供的流信息,显著提升了占用预测的准确性。此外,UniOcc还促进了多智能体协同感知的研究,为自动驾驶系统的协同决策提供了新的可能性。
以上内容由遇见数据集搜集并总结生成


