UIUC D3Field
收藏github2025-03-21 收录
下载链接:
https://robopil.github.io/d3fields/
下载链接
链接失效反馈官方服务:
资源简介:
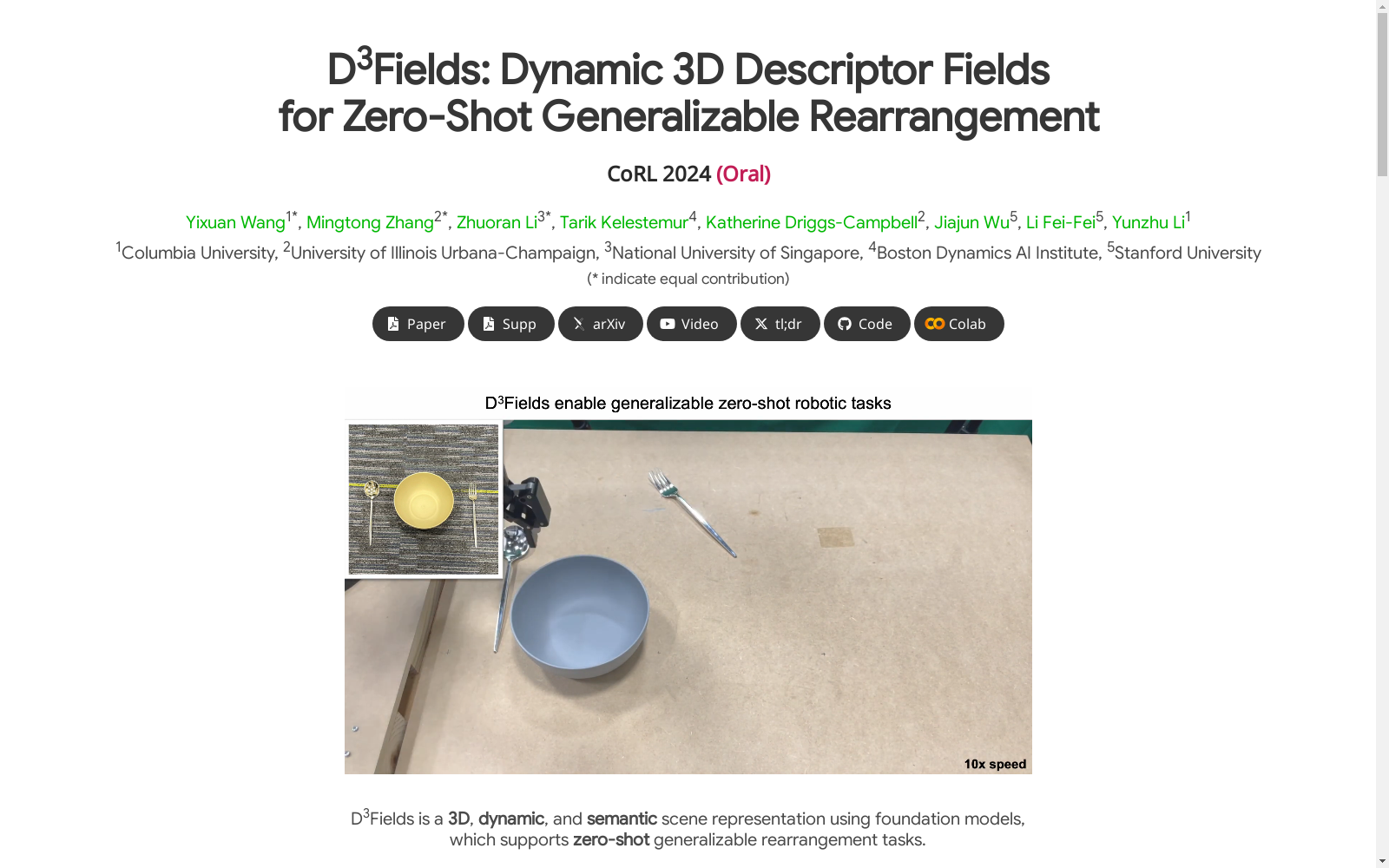
D3Fields 是由伊利诺伊大学厄巴纳-香槟分校和斯坦福大学联合开发的一种新型动态三维描述场(Dynamic 3D Descriptor Fields)数据集,旨在为机器人操作任务提供零样本(zero-shot)泛化能力。该数据集通过多视角 RGB-D 图像输入,利用基础模型(如 Grounding-DINO、SAM 等)提取语义特征和实例掩码,并将这些信息映射到三维空间中的任意点,形成动态、语义化的三维描述场。数据集内容丰富,涵盖多种日常操作任务(如整理鞋子、收集碎片、整理办公桌等)的场景表示和目标图像,数据来源为真实世界和模拟环境中的机器人操作实验。创建过程通过多视角融合和插值技术,无需额外训练即可生成描述场。该数据集的应用领域是机器人操作任务的零样本泛化,旨在解决传统方法在新任务和场景下的泛化难题,支持机器人根据二维目标图像完成多样化、动态化的三维操作任务。
D3Fields is a novel Dynamic 3D Descriptor Fields dataset co-developed by the University of Illinois Urbana-Champaign and Stanford University, which aims to provide zero-shot generalization capabilities for robotic manipulation tasks. This dataset takes multi-view RGB-D images as input, utilizes foundation models such as Grounding-DINO and SAM to extract semantic features and instance masks, and maps this information to arbitrary points in 3D space to form dynamic, semantic 3D descriptor fields. The dataset is rich in content, covering scene representations and target images for various daily manipulation tasks including sorting shoes, collecting debris, tidying desks and more. Its data is sourced from real-world and simulated robotic manipulation experiments. The creation process adopts multi-view fusion and interpolation techniques to generate descriptor fields without requiring additional training. The application scenario of this dataset focuses on zero-shot generalization for robotic manipulation tasks, aiming to address the generalization challenges faced by traditional methods in novel tasks and scenarios, and enables robots to complete diverse and dynamic 3D manipulation tasks based on 2D target images.
提供机构:
伊利诺伊大学厄巴纳-香槟分校
搜集汇总
数据集介绍
构建方式
UIUC D3Field数据集的构建依托于伊利诺伊大学厄巴纳-香槟分校的先进研究设施,通过高精度传感器和无人机技术,对农田环境进行多维度数据采集。该数据集涵盖了土壤湿度、作物生长状态、气象条件等多个关键参数,数据采集过程严格遵循科学实验标准,确保了数据的准确性和可靠性。
特点
UIUC D3Field数据集以其全面性和高精度著称,不仅包含了丰富的农田环境数据,还通过时间序列分析,提供了作物生长周期的动态变化信息。数据集中的每一组数据都经过严格的质量控制,确保了其在农业科学研究中的高可用性。此外,数据集还提供了详细的地理信息,支持空间分析,为精准农业提供了强有力的数据支持。
使用方法
UIUC D3Field数据集的使用方法多样,研究人员可以通过API接口直接访问数据,或下载完整数据集进行本地分析。数据集支持多种数据分析工具和编程语言,如Python和R,便于进行数据挖掘和模型训练。此外,数据集还提供了详细的使用指南和示例代码,帮助用户快速上手,进行高效的农业科学研究。
背景与挑战
背景概述
UIUC D3Field数据集是由伊利诺伊大学厄巴纳-香槟分校(UIUC)的研究团队创建的,旨在推动农业自动化与精准农业领域的发展。该数据集主要聚焦于农田环境中的动态三维场景理解,涵盖了多种作物在不同生长阶段的三维点云数据。通过高精度的传感器采集,数据集为研究人员提供了丰富的农田场景信息,支持作物监测、生长预测以及自动化农业机械的路径规划等研究。自发布以来,UIUC D3Field已成为农业机器人领域的重要基准数据集,推动了相关算法的创新与应用。
当前挑战
UIUC D3Field数据集在解决农田环境三维场景理解问题时面临多重挑战。首先,农田环境的复杂性和动态性使得数据采集与标注变得极为困难,例如作物生长过程中的形态变化以及光照、天气等外部因素的干扰。其次,构建大规模且高质量的三维点云数据集需要高精度的传感器设备和复杂的后处理技术,这对数据采集的硬件和算法提出了极高要求。此外,如何从海量点云数据中提取有效的特征以支持作物监测和自动化决策,也是当前研究中的一大技术难点。
常用场景
经典使用场景
UIUC D3Field数据集广泛应用于机器人导航和环境感知领域,特别是在复杂地形和动态环境中的自主导航系统开发中。该数据集通过提供高精度的三维环境数据,使得研究人员能够在模拟环境中测试和优化导航算法,从而提高机器人在实际应用中的适应性和稳定性。
实际应用
在实际应用中,UIUC D3Field数据集被广泛用于农业机器人、搜救机器人以及工业自动化等领域。例如,在农业机器人中,该数据集帮助开发出能够精确识别和避开障碍物的导航系统,从而提高了作物管理的效率和精度。在搜救任务中,机器人利用该数据集能够在复杂地形中快速定位和救援受困人员。
衍生相关工作
基于UIUC D3Field数据集,许多经典的研究工作得以展开。例如,有研究利用该数据集开发了新型的三维环境重建算法,显著提高了环境模型的精度和实时性。此外,还有研究结合深度学习技术,提出了基于三维感知的自主导航系统,这些系统在多个实际应用场景中展现了卓越的性能和鲁棒性。
以上内容由遇见数据集搜集并总结生成


