RVD-UPL
收藏github2025-02-12 更新2025-03-04 收录
下载链接:
https://github.com/wuhuateng/AVP_Dataset
下载链接
链接失效反馈官方服务:
资源简介:
这是一个地下停车场的实时车辆数据集,用于自动泊车任务。它包括一个ROS bag,3000+ BEV(鸟瞰图)图片,这些图片是通过IPM(逆向透视图)获得的。支持以下任务:视觉SLAM、激光雷达SLAM、语义分割、语义回归/点回归、深度估计、停车位检测等。
This is a real-time vehicle dataset for underground parking lots, tailored for automatic parking tasks. It contains one ROS bag and over 3,000 BEV (Bird's Eye View) images acquired via IPM (Inverse Perspective Mapping). It supports the following tasks: visual SLAM, LiDAR SLAM, semantic segmentation, semantic regression/point regression, depth estimation, parking space detection, etc.
创建时间:
2025-02-12
原始信息汇总
RVD-UPL: 地下停车场自动代客泊车真实车辆数据集
数据集概述
- 目的:为自动代客泊车任务提供地下停车场数据集
- 数据类型:ROS bag、3000+张鸟瞰图(BEV)
- 应用任务:视觉SLAM、激光雷达SLAM、语义分割、语义回归/点回归、深度估计、停车位检测等
场景描述
- 面积:约50000平方米
- 停车位数量:超过250个
- 道路长度:约1公里
- 包含元素:墙壁、柱子、静态车辆、停车位、禁停区标志、减速带、箭头、车道线等
传感器配置
- 4个鱼眼摄像头(环绕)
- 1个IMU
- 1个激光雷达
- 1个车轮速度编码器
数据组织
RVD-UPL
| README.md
|
⌊__BEV_picture
| |0.png
| |0.json
| |...
⌊__bag_file
| |all_avm_imu_pix_lidar_4.bag
⌊__config_file
| |instances_train2017.json
| |instances_val2017.json
⌊__Intrinsic_file
| |0_intrinsic.yaml
| |...
⌊__Extrinsic_file
| |0_extrinsic.yaml
| |...
⌊__Model_file
| |model_last.pth
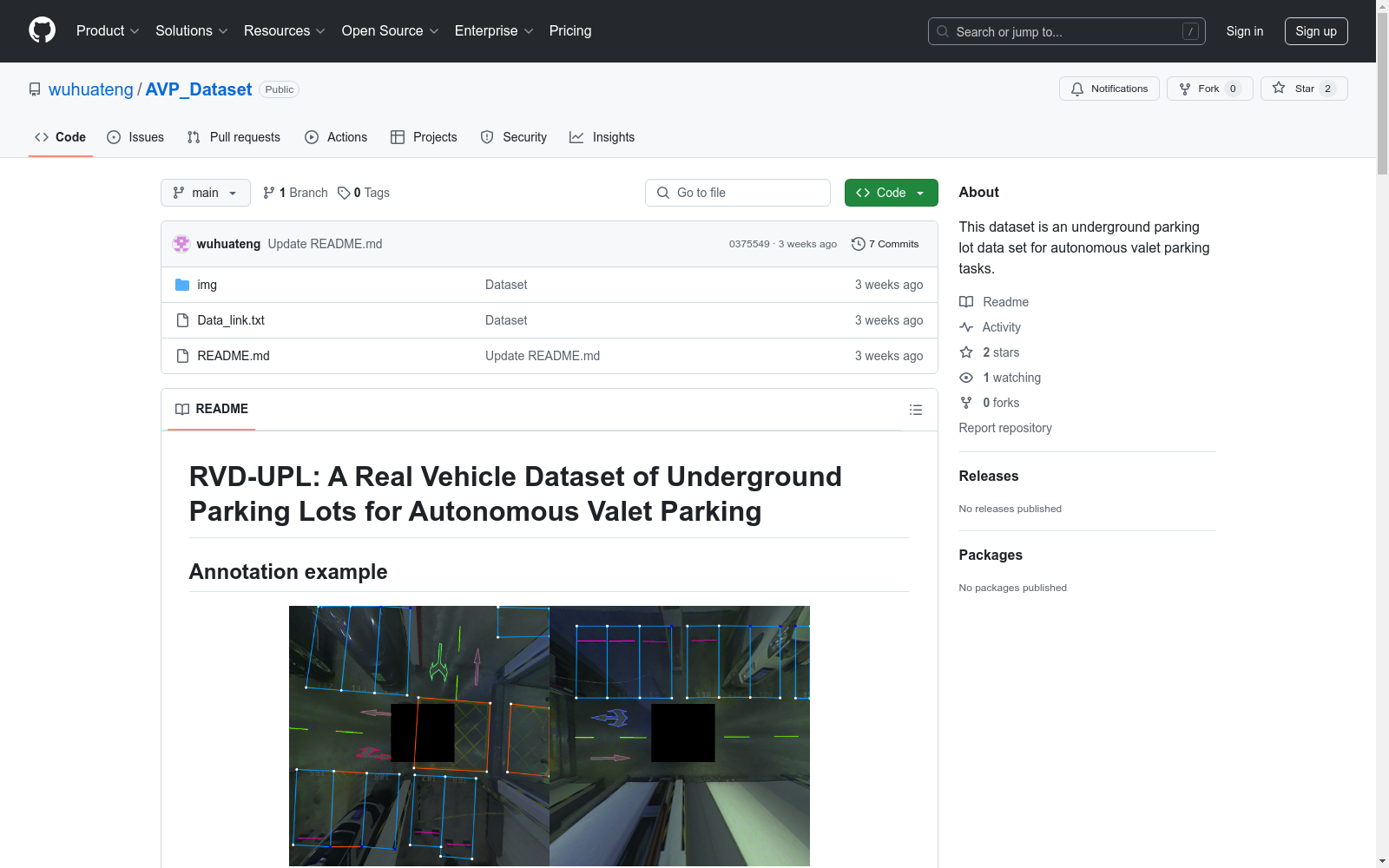
标注详情
- 标注元素:停车位、车道线、禁停区标志、减速带、箭头(共7种类型)
- 停车位标注:四个角落和箭头轮廓按相同顺序标注
- 属性:停车位角落具有可见和不可见属性
下载
- 下载链接:Data_link.txt
语义回归示例
- 模型:Centernet
- 预训练模型:提供model_last.pth用于测试
训练要求
- opencv-python
- Cython
- numba
- progress
- matplotlib
- easydict
- scipy
训练命令
python export CUDA_VISIBLE_DEVICES=0 python main.py ctdet --exp_id c --batch_size 64 --lr 2e-3
测试命令
python python demo.py --load_model ../models/model_last.pth
搜集汇总
数据集介绍
构建方式
RVD-UPL数据集旨在为自主代客泊车任务提供地下停车场的实际数据。该数据集通过ROS bag格式记录,包含3000余张BEV(俯视图)图片,这些图片通过IPM(逆向透视图变换)技术获取。数据采集过程中,使用了环绕的4个鱼眼相机、IMU、激光雷达以及车轮速度编码器等多种传感器,实现了对地下停车场场景的全面捕捉,从而构建了一个支持视觉SLAM、激光雷达SLAM、语义分割、深度估计等多种任务的数据集。
使用方法
使用RVD-UPL数据集,用户可以从提供的Data_link.txt文件中下载所需数据。数据集的结构组织清晰,包括BEV图片、ROS bag文件、配置文件、内参和外参文件以及模型文件等。用户可以根据具体任务需求,利用数据集中的预训练模型或自定义模型进行训练和测试。训练过程中,用户需要安装必要的依赖库,并使用提供的命令进行模型的训练和测试,以实现泊车相关任务的算法开发和优化。
背景与挑战
背景概述
RVD-UPL数据集,专为自动驾驶代客泊车任务而构建,其创建旨在推进地下停车场环境下的自主导航技术。该数据集由一组研究人员开发,并于近年公开,包含了ROS bag格式记录的数据、3000余张鸟瞰图(BEV),以及通过逆透视映射技术获取的图像。数据集覆盖了一个约50000平方米的地下停车场,具备超过250个停车位和约1公里的道路长度,场景中包含了墙壁、柱子、静态车辆、停车位、禁停区域标志、减速带、箭头、车道线等元素。此数据集的构建,不仅丰富了自动驾驶领域的研究资源,也为相关技术的实证研究提供了重要的基础数据。
当前挑战
在研究领域,RVD-UPL数据集面临的挑战主要在于其数据标注的精确性和多样性。首先,对于自动驾驶技术的关键任务如视觉SLAM、激光雷达SLAM、语义分割、深度估计、停车位检测等,数据标注的准确性直接关系到模型的性能。其次,地下停车场的复杂光照条件和动态环境增加了数据集构建的难度。此外,数据集在标注过程中需要处理多种元素的标注,包括停车位、车道线、箭头等,这要求高标准的标注质量以保证算法的有效训练和测试。在技术层面,数据集的多样性和大规模特性也为数据存储、管理和高效计算提出了更高的要求。
常用场景
经典使用场景
RVD-UPL数据集作为地下停车场的实时车辆数据集,其经典的使用场景主要集中于自动驾驶代客泊车任务。该数据集通过提供鸟瞰图(BEV)及其标注信息,支持视觉SLAM、激光雷达SLAM、语义分割、深度估计、停车位检测等多种任务,为研究自动驾驶系统在地下停车场环境中的感知与决策提供了丰富的数据资源。
解决学术问题
该数据集解决了自动驾驶在地下停车场环境中的多项学术研究问题,如车辆定位、环境感知、路径规划等。其详尽的标注信息,包括停车位、车道线、禁停区域标志、减速带和箭头等元素的标注,为相关算法的研发和评估提供了标准依据,对自动驾驶技术的进步具有重要的推动作用。
实际应用
在实际应用中,RVD-UPL数据集可用于自动驾驶车辆的测试与训练,通过模拟地下停车场的复杂环境,有助于提高自动驾驶系统在不同场景下的适应能力和泊车精度。此外,该数据集也可用于智能交通系统的研究,为停车场管理提供数据支持。
数据集最近研究
最新研究方向
在自动驾驶领域,RVD-UPL数据集以其对地下停车场环境的细致描绘,为自主泊车任务提供了宝贵的视觉数据资源。近期研究集中于利用该数据集进行视觉SLAM、激光雷达SLAM、语义分割、深度估计以及停车位检测等任务,旨在提升车辆在复杂停车场环境中的自主导航与决策能力。该数据集支持的研究不仅有助于推动自动驾驶技术在地下停车场这一特定场景的应用,也为智能交通系统的研究与开发提供了新的视角和数据支撑,具有显著的研究价值和实际应用潜力。
以上内容由遇见数据集搜集并总结生成


