VLN-SRDF
收藏Bootstrapping Language-Guided Navigation Learning with Self-Refining Data Flywheel
数据集概述
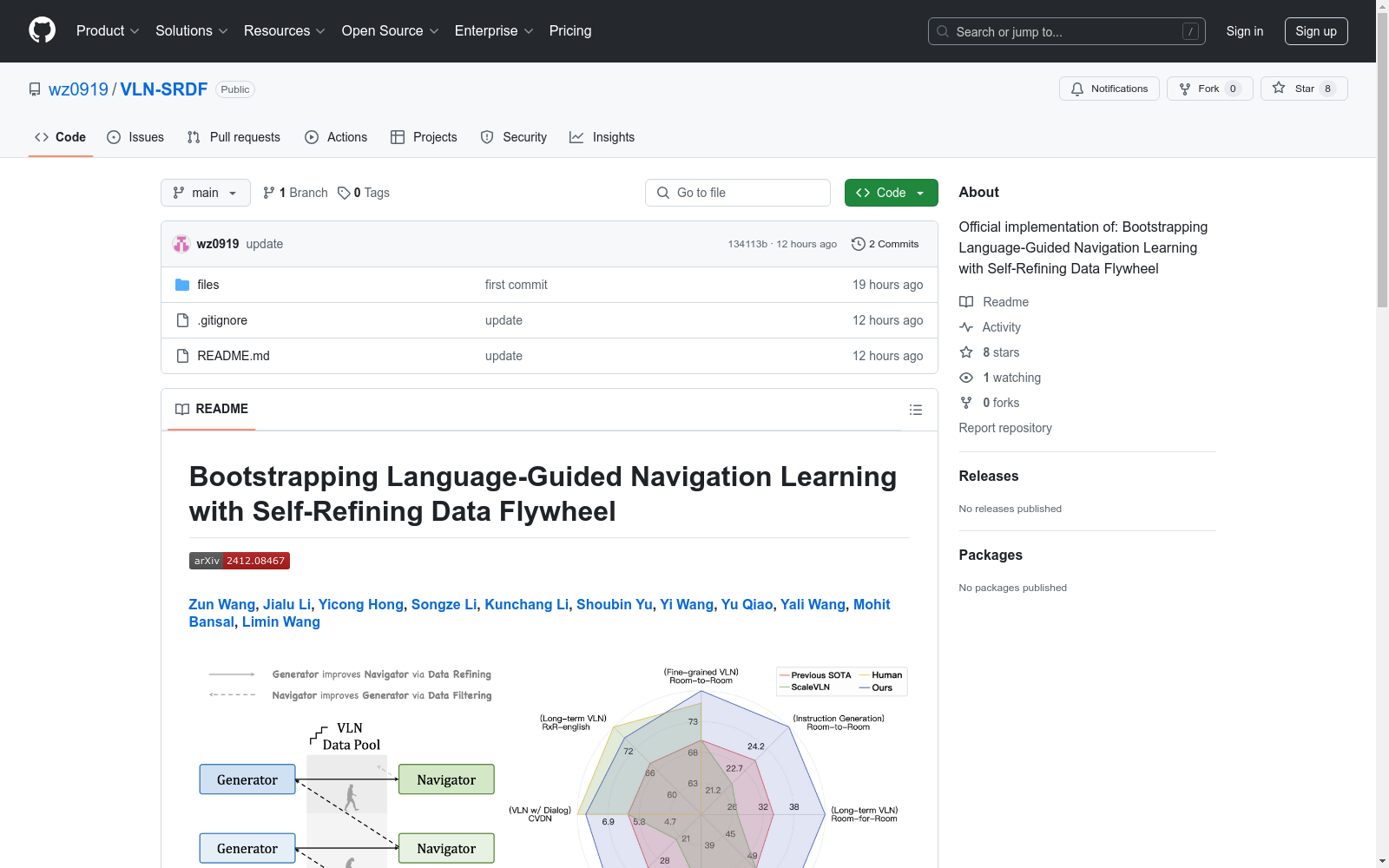
该数据集用于语言引导的导航学习,通过自精炼数据飞轮(Self-Refining Data Flywheel)方法进行训练和测试。数据集包括导航器和生成器的训练数据,以及用于数据生成的代码。
安装指南
-
安装Matterport3D模拟器:按照这里的说明进行安装,使用最新版本。
-
安装依赖项:
conda create --name vlnde python=3.9 conda activate vlnde pip install -r requirements.txt
测试结果复现
R2R导航
-
执行以下命令以复现R2R导航测试结果:
cd VLN-DUET/map_nav_src bash scripts/valid_r2r.bash
-
日志输出示例:
Env name: val_train_seen, action_steps: 5.36, steps: 5.81, lengths: 11.80, nav_error: 1.00, oracle_error: 0.56, sr: 91.33, oracle_sr: 94.00, spl: 87.94, nDTW: 89.56, SDTW: 86.45, CLS: 88.58 Env name: val_seen, action_steps: 5.30, steps: 5.57, lengths: 11.21, nav_error: 1.54, oracle_error: 0.95, sr: 86.78, oracle_sr: 90.70, spl: 83.31, nDTW: 86.67, SDTW: 81.03, CLS: 85.26 Env name: val_unseen, action_steps: 5.63, steps: 6.22, lengths: 12.00, nav_error: 1.62, oracle_error: 0.92, sr: 85.65, oracle_sr: 90.34, spl: 78.72, nDTW: 81.13, SDTW: 75.73, CLS: 79.85
R2R指令生成
-
执行以下命令以复现R2R指令生成测试结果:
cd Mantis bash mantis/train/scripts/valid_best.bash
-
日志输出示例:
bleu1: 75.32, bleu4: 31.14, meteor: 24.99, rouge: 51.37, cider: 49.16, spice: 26.18, spice_v1: 30.94, num_words: 198.00, avg_lens: 23.78
引用
如果该数据集对你的研究有帮助,请引用以下论文: bibtex @article{zun2024srdf, author = { Wang, Zun and Li, Jialu and Hong, Yicong and Li, Songze and Li, Kunchang and Yu, Shoubin and Wang, Yi and Qiao, Yu and Wang, Yali and Bansal, Mohit and Wang, Limin}, title = {Bootstrapping Language-Guided Navigation Learning with Self-Refining Data Flywheel}, journal = {arxiv}, year = {2024}, url = {https://arxiv.org/abs/2412.08467} }