ScanObjectNN
收藏arXiv2019-08-19 更新2024-06-21 收录
下载链接:
https://hkust-vgd.github.io/scanobjectnn/
下载链接
链接失效反馈官方服务:
资源简介:
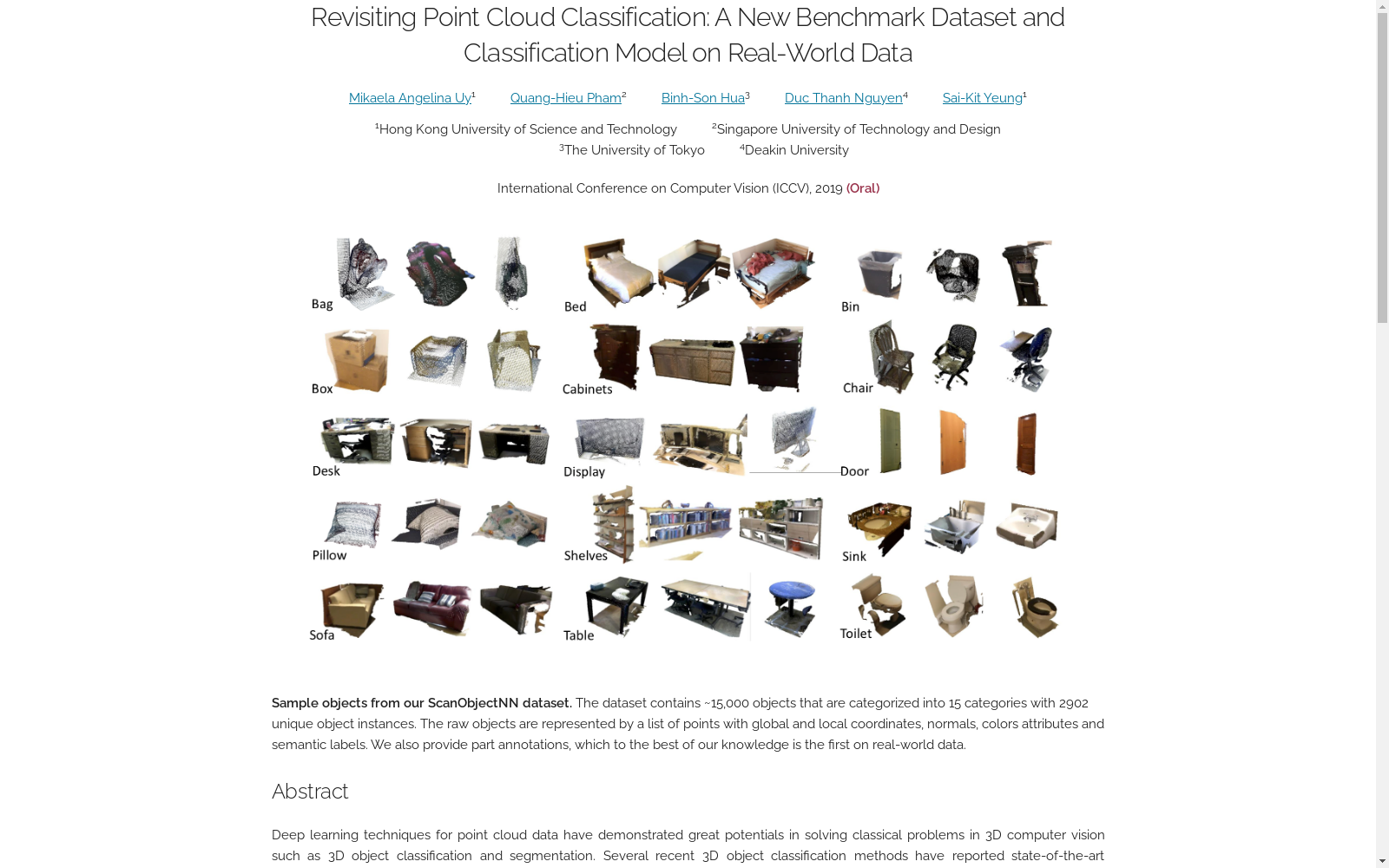
ScanObjectNN是由香港科技大学等机构创建的一个新的真实世界点云对象数据集,基于扫描的室内场景数据。该数据集包含2902个对象,分为15个常见类别,数据来源于SceneNN和ScanNet两个场景网格数据集。创建过程中,研究者手动筛选和选择对象,并考虑额外的对象扰动以丰富数据集。ScanObjectNN旨在解决真实世界对象分类的挑战,如背景杂乱和部分遮挡,适用于3D计算机视觉中的对象分类和分割任务。
ScanObjectNN is a novel real-world point cloud object dataset developed by institutions including the Hong Kong University of Science and Technology, based on scanned indoor scene data. This dataset contains 2902 objects, categorized into 15 common classes, and is sourced from two scene mesh datasets, SceneNN and ScanNet. During its creation, researchers manually screened and selected objects, and introduced additional object perturbations to enrich the dataset. ScanObjectNN aims to address the challenges of real-world object classification, such as background clutter and partial occlusion, and is applicable to object classification and segmentation tasks in 3D computer vision.
提供机构:
香港科技大学
创建时间:
2019-08-13
搜集汇总
数据集介绍
构建方式
ScanObjectNN数据集的构建基于扫描的真实室内场景数据。研究人员从SceneNN和ScanNet两个场景网格数据集中选取了700个独特的场景,并对每个场景中的物体进行了手动检查和分类,最终得到了2902个物体,这些物体被归类为15个类别。为了模拟真实世界中的场景,研究人员还引入了背景数据和部分物体的变形,以此来丰富数据集的多样性。
使用方法
使用ScanObjectNN数据集进行点云对象分类时,首先需要将数据集分为训练集和测试集。然后,可以使用现有的点云对象分类方法对训练集进行训练,并对测试集进行评估。为了更好地模拟真实世界场景,研究人员还引入了背景数据和部分物体的变形,这使得分类任务更具挑战性。此外,ScanObjectNN数据集还提供了部分注释,可以用于部分分割任务,从而提高部分物体分类的准确性。
背景与挑战
背景概述
在三维计算机视觉领域,点云数据的深度学习技术已经展示了在解决经典问题,如三维物体分类和分割方面的巨大潜力。尽管在CAD模型数据集(如ModelNet40)上取得了令人印象深刻的高准确率(约92%),但在现实世界场景中,物体分类仍然是一个具有挑战性的任务。为了证明这一点,研究人员引入了ScanObjectNN,这是一个基于扫描室内场景数据的新现实世界点云物体数据集。通过对现有点云分类技术的全面基准测试,研究人员发现,ScanObjectNN数据集对现有技术提出了巨大挑战,因为现实世界扫描的物体经常被背景杂乱无章地遮挡或部分遮挡。此外,研究人员还确定了三个关键开放性问题,并提出了新的点云分类神经网络,这些网络在分类具有杂乱背景的物体方面取得了最先进的性能。
当前挑战
ScanObjectNN数据集的主要挑战包括:1) 对现实世界数据的分类模型的泛化能力不足;2) 现实世界物体经常由于遮挡和重建误差而出现上下文和部分观察;3) 如何有效处理由于现实场景中的杂乱而与物体一起出现的背景。
常用场景
经典使用场景
ScanObjectNN 数据集主要用于点云数据的分类任务,特别是在现实世界的场景下。这个数据集包含了从扫描的室内场景中提取的约 15,000 个物体,分为 15 个类别。数据集的挑战性在于物体常常与背景杂乱无章地交织在一起,或者由于遮挡而部分可见。这使得 ScanObjectNN 成为测试和训练点云分类模型的一个理想选择。
解决学术问题
ScanObjectNN 数据集解决了现实世界中物体分类的挑战。现有的点云分类模型在合成数据集上取得了很高的准确率,但在现实世界的数据上表现不佳。ScanObjectNN 通过提供具有背景杂乱和部分可见物体的数据,帮助研究人员探索如何提高模型在现实世界场景下的性能。此外,数据集还支持部分物体分类和分割任务,为未来的研究提供了更多的可能性。
实际应用
ScanObjectNN 数据集在实际应用中有着广泛的应用前景。例如,在机器人领域,ScanObjectNN 可用于训练机器人识别和分类现实世界中的物体。在自动驾驶汽车中,ScanObjectNN 可用于训练车辆识别道路上的障碍物。此外,ScanObjectNN 还可用于智能家居系统,帮助系统识别和分类家中的物体,从而实现更加智能的家居控制。
数据集最近研究
最新研究方向
ScanObjectNN数据集作为现实世界点云对象分类的基准数据集,为研究者在点云分类领域提供了新的研究方向。该数据集包含了约15,000个对象,涵盖了15个常见类别,并考虑了额外的对象扰动,如背景干扰、物体部分可见等。研究者在ScanObjectNN数据集上进行了广泛的基准测试,发现现有模型在现实世界数据上的表现远不如在合成数据上的表现,这表明现实世界点云分类仍然是一个具有挑战性的任务。研究者们提出了三个关键开放性问题:1) 如何有效地利用背景信息进行分类,同时避免背景噪声的干扰;2) 如何处理由于遮挡和重建误差导致的物体部分可见性问题;3) 如何在杂乱的现实世界场景中有效地处理背景。此外,研究者们还提出了一种新的点云分类网络,通过联合学习分类和分割任务,在ScanObjectNN数据集上取得了最先进的性能。这些研究为点云分类领域提供了新的思路和方法,有助于推动该领域的发展。
相关研究论文
- 1Revisiting Point Cloud Classification: A New Benchmark Dataset and Classification Model on Real-World Data香港科技大学 · 2019年
以上内容由遇见数据集搜集并总结生成


