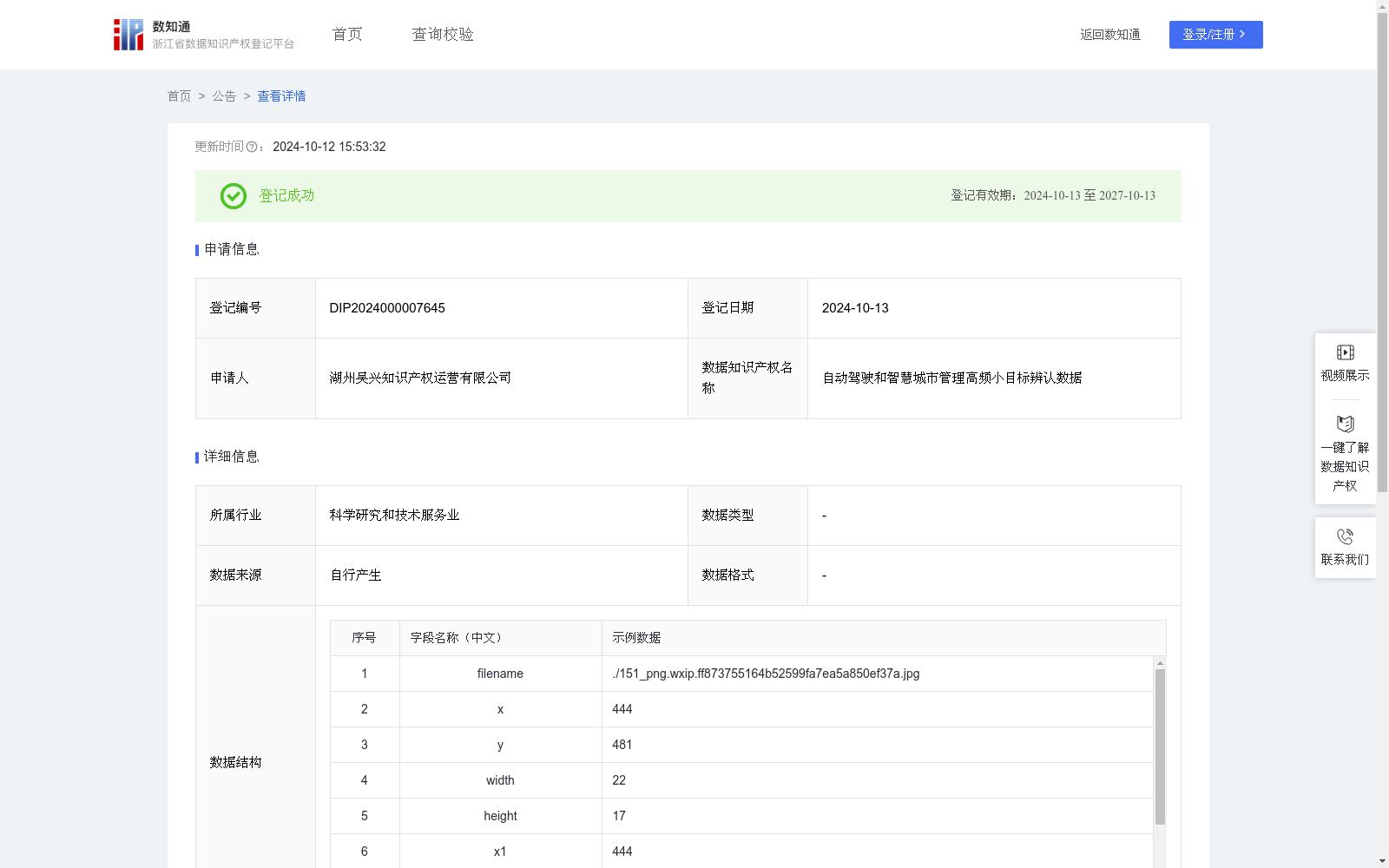
自动驾驶和智慧城市管理高频小目标辨认数据
收藏浙江省数据知识产权登记平台2024-10-12 更新2024-10-14 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/70472
下载链接
链接失效反馈官方服务:
资源简介:
数据集包含了不同时间(白天/夜晚)、不同天气条件下的图像,可用于自动驾驶和智慧城市管理相关的目标检测模型训练。可以训练模型准确识别并跟踪道路上的行人、自行车骑行者等高频小目标,这对于避免碰撞、保障行人安全至关重要。数据采集与标注阶段使用内部测试场景中行车记录仪在不同时间和天气条件下抓拍城市室外场景。图像预处理保留场景完整特征。考虑自然场景高频小目标特性,采用随机裁剪-随机旋转-随机翻转-亮度和对比度调整-高斯噪声对图像增强。使用CVAT进行标注,采用包围框(x,y,width,height)格式进行多类别目标检测标注,"obstacles"类别包括除车辆外任何影响行车的障碍物,标注时目测估计目标高度,例如纸箱,不低于20cm。对于远处难以辨认的小目标目标,当最窄边未超过20像素,不予标注,避免obstacles训练错误;"plant"类别涵盖各种植被;"smallobject"指图像中可驶过的较小的物体(如石块、路面脏污)。
将包围框转换为CSV格式。转换公式:
x1=x,y1=y,x2=x+width,y2=y+height,cls∈{"obstacles","plant","smallobject"}
filenam为图像,x1,y1,x2,y2是坐标,cls为类别,obstacles,plant,smallobject分别代表路障、行道树/绿化带/草坪、石块。
This dataset comprises images captured across varying times (day/night) and weather conditions, which can be utilized for training object detection models for autonomous driving and smart city management applications. It enables trained models to accurately identify and track high-frequency small targets such as pedestrians and cyclists on roadways, which is critical for collision avoidance and pedestrian safety assurance.
The dataset was collected and annotated using dashcams deployed in internal test scenarios, capturing urban outdoor scenes under diverse times and weather conditions. Full scene features of the original images are preserved during preprocessing.
Given the prevalence of high-frequency small targets in natural scenes, image augmentation is performed via a pipeline of random cropping, random rotation, random flipping, brightness and contrast adjustment, and Gaussian noise addition.
Annotation was conducted using CVAT, with multi-class object detection annotations formatted as (x, y, width, height). The "obstacles" category encompasses any obstacles impeding driving except motor vehicles; during annotation, the target height is estimated visually, e.g., cardboard boxes with a height of no less than 20 cm. For distant small targets that are difficult to discern, those with their narrowest side measuring no more than 20 pixels are excluded from annotation to avoid training errors in the "obstacles" category. The "plant" category covers all types of vegetation; "smallobject" refers to small drivable objects in images, such as stones and road dirt.
The bounding boxes are converted to CSV format using the following conversion formula: x1 = x, y1 = y, x2 = x + width, y2 = y + height, where cls ∈ {"obstacles", "plant", "smallobject"}. Each CSV entry consists of the image filename, x1, y1, x2, y2 coordinates, and the class label cls. Specifically, obstacles, plant, and smallobject correspond to road barriers, street trees/green belts/lawns, and stones, respectively.
提供机构:
湖州吴兴知识产权运营有限公司
创建时间:
2024-09-03
搜集汇总
数据集介绍
特点
该数据集包含4315条图像数据,用于自动驾驶和智慧城市管理中的高频小目标检测,涵盖不同时间和天气条件,标注了路障、植被和小物体等类别。数据采用包围框格式标注,并通过多种图像增强方法处理,适用于模型训练以提高目标识别准确率。
以上内容由遇见数据集搜集并总结生成


