GTA-UAV
收藏arXiv2024-09-25 更新2024-09-27 收录
下载链接:
https://yux1angji.github.io/game4loc
下载链接
链接失效反馈官方服务:
资源简介:
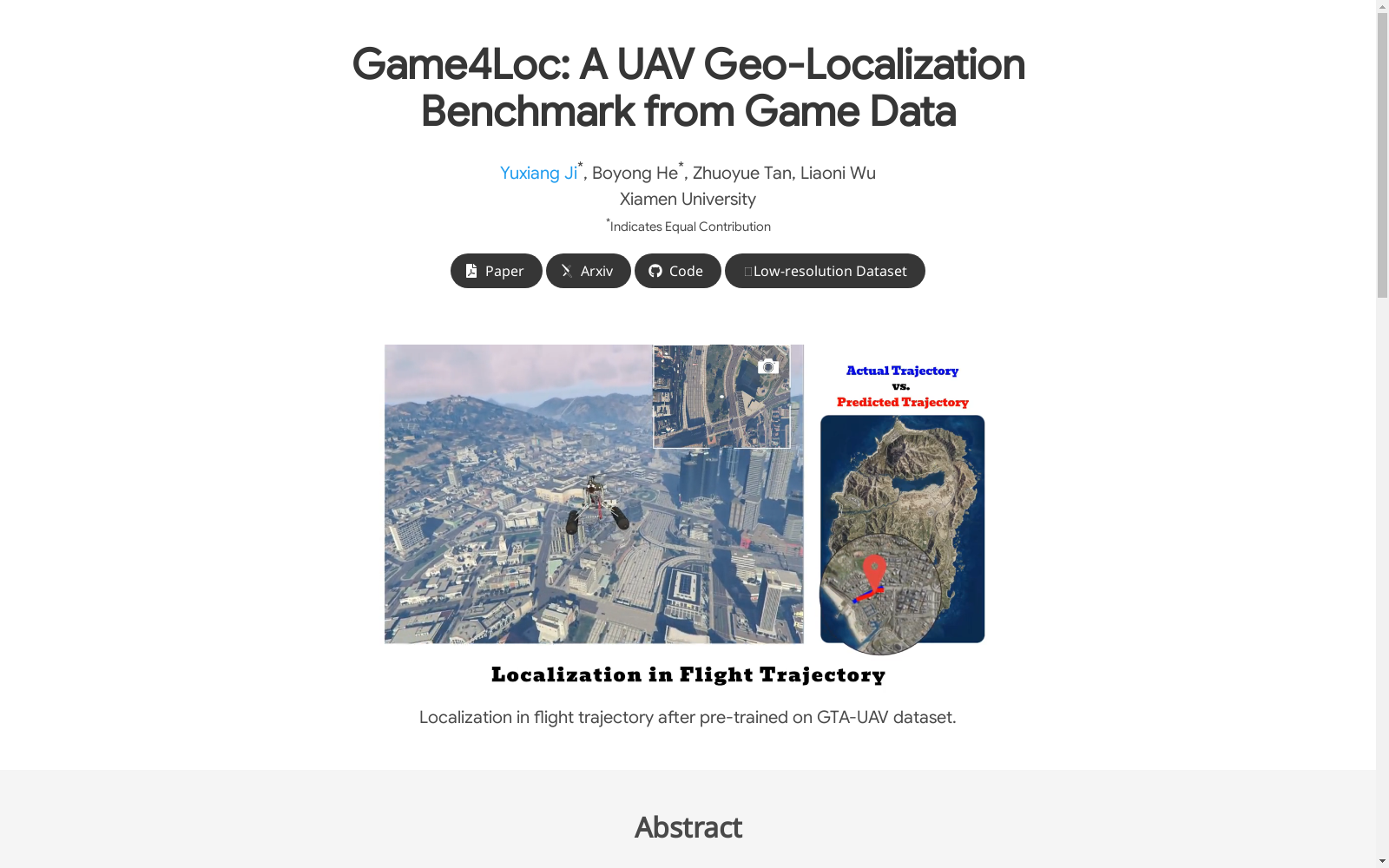
GTA-UAV数据集是由厦门大学人工智能研究所创建的一个大型无人机地理定位数据集,旨在解决无人机在GPS失效环境下的视觉定位问题。该数据集包含33,763张无人机视角图像,覆盖了城市、山地、沙漠、森林、田野和海岸等多种场景,模拟了多种飞行高度和姿态。数据集的创建过程利用了现代计算机游戏进行模拟,通过对比学习方法构建了部分匹配的无人机和卫星视角图像对。该数据集的应用领域主要集中在无人机视觉定位和地理定位任务,旨在提高无人机在复杂环境中的自主定位能力。
The GTA-UAV dataset is a large-scale UAV geolocalization dataset developed by the Artificial Intelligence Institute of Xiamen University, which aims to solve the visual localization problem of UAVs in GPS-denied environments. This dataset contains 33,763 UAV perspective images, covering diverse scenarios such as urban areas, mountains, deserts, forests, fields, coasts and more, and simulates various flight altitudes and attitudes. The dataset was created using modern computer games for simulation, and partially matched UAV and satellite perspective image pairs were constructed via contrastive learning methods. The primary application areas of this dataset focus on UAV visual localization and geolocalization tasks, with the goal of improving the autonomous localization capability of UAVs in complex environments.
提供机构:
厦门大学
创建时间:
2024-09-25
搜集汇总
数据集介绍
构建方式
GTA-UAV数据集的构建基于现代计算机游戏,通过模拟无人机在不同飞行高度、姿态和场景下的视角,收集了大量连续区域的无人机视图图像。具体而言,数据集包含了33,763张无人机视图图像,覆盖了城市、山脉、沙漠、森林、田野和海岸等多种场景。为了确保数据的多样性和实用性,数据集还模拟了从80米到650米不等的飞行高度,以及多种相机角度。此外,数据集采用了基于权重的对比学习方法,通过计算无人机视图与卫星视图之间的地面区域重叠率,构建了部分匹配的数据对,从而避免了传统数据集中完美匹配的假设。
特点
GTA-UAV数据集的主要特点在于其大规模、连续区域覆盖和多样化的飞行条件。数据集不仅包含了丰富的场景和高度变化,还引入了部分匹配的数据对,这使得数据集更贴近实际应用场景。此外,数据集通过游戏模拟的方式,有效降低了数据采集的成本和隐私问题。通过引入加权对比学习方法,数据集能够在训练过程中更好地处理部分匹配的数据对,从而提高模型的泛化能力和实际应用效果。
使用方法
GTA-UAV数据集适用于无人机视觉地理定位任务的研究和开发。研究者可以利用该数据集进行模型训练和验证,特别是在处理部分匹配的跨视图数据对时。数据集提供了详细的元数据,包括GPS信息、相机姿态和视场角,这有助于在实际应用中进行精确的地理定位。此外,数据集还支持多种评估指标,如Recall@K、AP和SDM@K,帮助研究者全面评估模型的性能。通过使用GTA-UAV数据集,研究者可以开发出更适应实际应用需求的无人机视觉地理定位系统。
背景与挑战
背景概述
GTA-UAV数据集由厦门大学人工智能研究所和航天工程学院的研究团队创建,旨在解决无人机视觉地理定位中的关键问题。该数据集利用现代计算机游戏生成大规模连续区域的无人机视图和卫星视图图像对,涵盖多种飞行高度、姿态和场景。GTA-UAV数据集的构建标志着从传统的完美匹配假设向更实际的部分匹配任务的转变,这对于提升无人机在GPS拒绝环境中的自主定位能力具有重要意义。
当前挑战
GTA-UAV数据集面临的挑战主要包括:1) 解决无人机视图与卫星视图之间的部分匹配问题,这在实际应用中更为常见;2) 构建过程中需要克服高成本和隐私问题,确保数据集的规模和多样性;3) 需要开发新的训练方法,如加权对比学习,以有效利用部分匹配数据进行模型训练。这些挑战不仅推动了数据集的创新,也为无人机视觉地理定位技术的发展提供了新的方向。
常用场景
经典使用场景
在无人机视觉地理定位领域,GTA-UAV数据集的经典应用场景主要集中在无人机在GPS信号受限或失效的环境中,通过视觉匹配技术获取地理位置信息。该数据集通过模拟多种飞行高度、姿态和场景,提供了丰富的无人机视角图像与地理标记的卫星图像对,使得研究者能够训练和验证基于深度学习的图像匹配和检索算法,从而实现无人机在复杂环境中的自主定位。
实际应用
在实际应用中,GTA-UAV数据集为无人机在城市、山区、沙漠等多种复杂环境中的自主导航提供了技术支持。例如,在灾害救援、农业监测和城市规划等领域,无人机需要在没有GPS信号的情况下,通过视觉匹配技术确定自身位置。GTA-UAV数据集的广泛场景和多样化的飞行条件,使得训练出的模型具有更强的泛化能力,能够在不同环境中实现精确的地理定位。
衍生相关工作
基于GTA-UAV数据集,研究者们开发了多种先进的图像匹配和检索算法,如加权对比学习方法weighted-InfoNCE,显著提升了模型在部分匹配场景下的性能。此外,该数据集还促进了跨视图地理定位技术的研究,推动了如VIGOR和DenseUAV等数据集的发展。这些工作不仅在学术界引起了广泛关注,也为实际应用中的无人机视觉地理定位技术提供了坚实的基础。
以上内容由遇见数据集搜集并总结生成


