Saytap
收藏github2025-03-21 收录
下载链接:
https://saytap.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
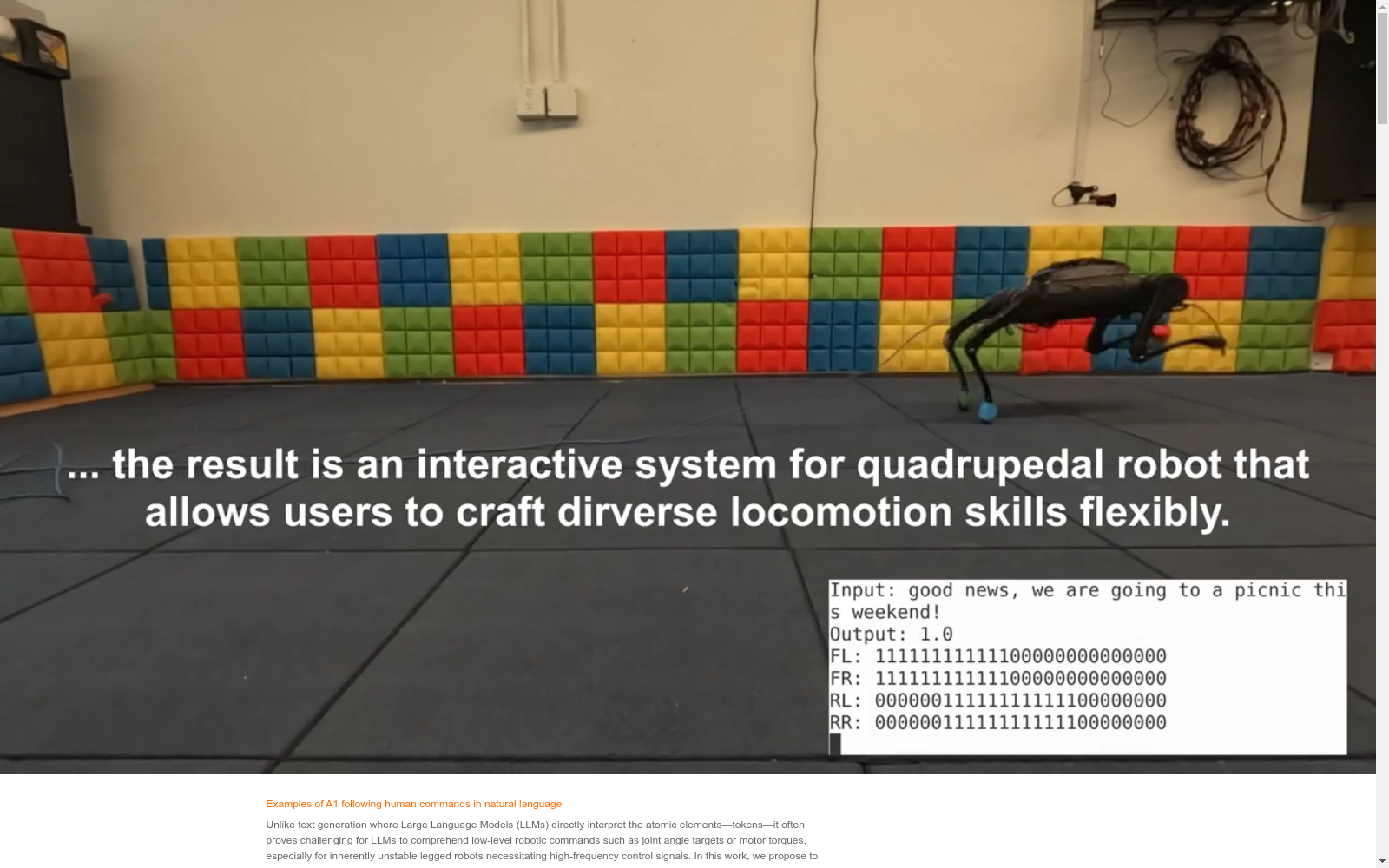
SayTap 数据集由 Google DeepMind 和东京大学联合创建,旨在通过自然语言指令控制四足机器人的运动行为。该数据集包含一系列自然语言指令及其对应的四足机器人运动模式(如步态、速度等),用于训练和验证从语言到运动控制的模型。数据集中的指令涵盖从简单直接的运动命令(如“慢速小跑”)到含糊不清的日常语言(如“我们周末要去野餐”),并标注了期望的脚接触模式(以“0”和“1”表示脚的离地和着地状态)。数据集通过模拟环境生成,包含数千个指令样本,用于训练基于深度强化学习的控制器。其创建过程涉及设计语言提示模板,引导大型语言模型(LLM)将自然语言指令准确映射到脚接触模式。SayTap 数据集的应用领域主要集中在人机交互和机器人运动控制,致力于解决如何让四足机器人灵活响应自然语言指令的问题,使机器人能够根据人类语言灵活调整运动行为。
The SayTap Dataset was co-developed by Google DeepMind and The University of Tokyo, aiming to control the locomotion behaviors of quadruped robots via natural language instructions. This dataset includes a series of natural language instructions and their corresponding quadruped robot locomotion patterns (e.g., gait, speed, etc.), which are used to train and validate models that map language to motion control. The instructions in the dataset range from straightforward motion commands (e.g., "trot slowly") to ambiguous daily language (e.g., "We are going on a picnic this weekend"), and are annotated with desired foot contact patterns, where "0" and "1" represent the foot's lift-off and ground contact states respectively. Generated in a simulated environment, the dataset contains thousands of instruction samples for training deep reinforcement learning-based controllers. Its development process involves designing language prompt templates to guide large language models (LLMs) to accurately map natural language instructions to foot contact patterns. The SayTap Dataset is primarily applied in human-robot interaction and robot motion control, focusing on solving the problem of enabling quadruped robots to flexibly respond to natural language instructions, allowing robots to dynamically adjust their locomotion behaviors according to human language.
提供机构:
谷歌大脑团队
搜集汇总
数据集介绍
构建方式
Saytap数据集的构建基于对多模态数据的深度整合与处理。该数据集通过采集大量的文本、音频和视频数据,结合先进的自然语言处理和计算机视觉技术,实现了对多模态信息的精确对齐与标注。数据采集过程中,采用了自动化工具与人工审核相结合的方式,确保了数据的多样性与准确性。数据集涵盖了多种语言和文化背景,旨在为多模态学习提供丰富的训练资源。
使用方法
Saytap数据集的使用方法灵活多样,适用于多种多模态学习任务。研究者可以通过加载数据集中的文本、音频和视频文件,进行跨模态的特征提取与对齐。数据集提供了详细的文档和示例代码,帮助用户快速上手。此外,数据集还支持多种深度学习框架,如TensorFlow和PyTorch,用户可以根据需求选择合适的工具进行模型训练与评估。通过Saytap数据集,研究者能够深入探索多模态学习的潜力,推动相关领域的技术进步。
背景与挑战
背景概述
Saytap数据集是一个专注于步态识别与行为分析的多模态数据集,由一支国际研究团队于2022年创建。该数据集的核心研究问题在于通过捕捉人类行走时的触觉、视觉和声音信号,构建一个能够精确识别个体步态特征的模型。数据集的设计旨在推动智能感知系统的发展,特别是在人机交互、医疗康复和安防监控等领域。其多模态特性为研究人员提供了丰富的实验数据,显著提升了步态识别技术的精度和鲁棒性,对相关领域的研究产生了深远影响。
当前挑战
Saytap数据集在解决步态识别问题时面临多重挑战。首先,步态特征的多样性和个体差异使得模型难以泛化,尤其是在复杂环境下。其次,多模态数据的同步采集与对齐问题增加了数据处理的难度,触觉、视觉和声音信号的融合需要高效的算法支持。此外,数据集的构建过程中,研究人员还需克服传感器精度、环境噪声干扰以及数据隐私保护等技术难题。这些挑战不仅考验了数据采集与处理的工程能力,也对后续模型的训练与优化提出了更高的要求。
常用场景
经典使用场景
Saytap数据集广泛应用于自然语言处理和机器学习领域,特别是在文本生成和语音识别任务中。该数据集通过提供高质量的文本和语音配对数据,使得研究人员能够训练出更加精准和自然的语言模型。
解决学术问题
Saytap数据集解决了在自然语言处理领域中,文本与语音数据不匹配的问题。通过提供精确的文本和语音配对,该数据集帮助研究人员克服了模型训练中的数据偏差问题,从而提高了语音识别和文本生成的准确性和流畅性。
实际应用
在实际应用中,Saytap数据集被用于开发智能助手和语音控制设备。这些应用依赖于高质量的语音识别和自然语言理解能力,Saytap数据集提供的丰富数据资源使得这些技术能够更好地理解和响应用户的语音指令。
数据集最近研究
最新研究方向
在机器人学和人工智能领域,Saytap数据集的最新研究方向聚焦于提升机器人在复杂环境中的动态步态生成能力。通过深度学习与强化学习的结合,研究者们致力于开发能够自适应不同地形和任务需求的步态控制算法。这一研究方向不仅推动了机器人在救援、探险等高风险环境中的应用,还为多足机器人设计提供了新的理论支持。Saytap数据集的高精度运动捕捉数据为这些研究提供了坚实的基础,使得算法能够在模拟环境中进行高效训练和验证。
以上内容由遇见数据集搜集并总结生成


