LaRS
收藏arXiv2023-08-18 更新2024-06-21 收录
下载链接:
https://lojzezust.github.io/lars-dataset
下载链接
链接失效反馈官方服务:
资源简介:
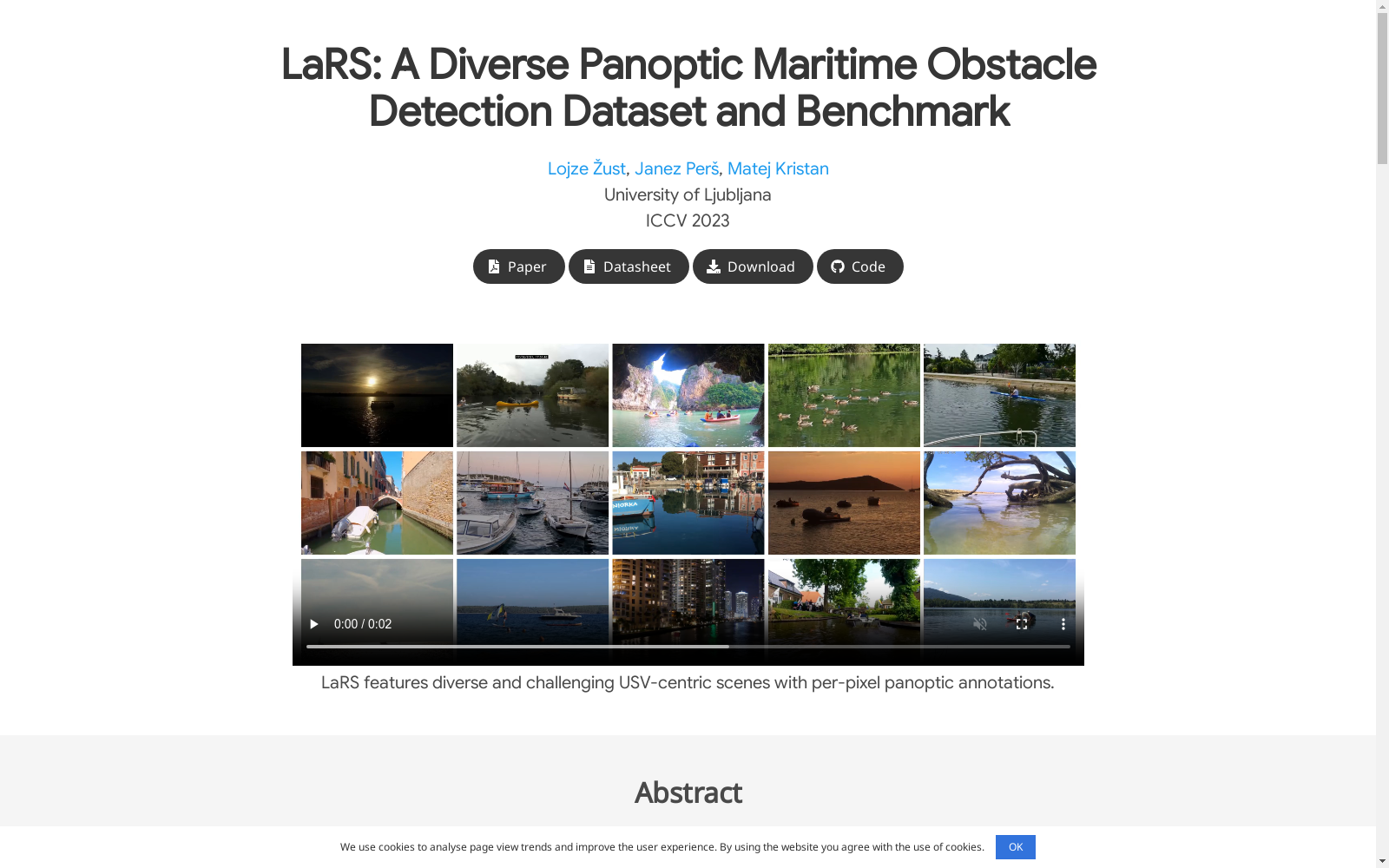
LaRS数据集由卢布尔雅那大学的ViCoS实验室创建,旨在解决海上障碍物检测领域的数据多样性和复杂性问题。该数据集包含超过4000个关键帧,每个关键帧都配有全景分割标注,涵盖8个物体类别和3个背景类别,以及19个描述环境类型、光照条件、反射水平等的全局场景属性。此外,每个关键帧还附带了前9帧,以支持利用时间纹理的方法开发。LaRS数据集的应用领域包括自主无人水面舰艇(USV)的障碍物检测,旨在提高检测的准确性和鲁棒性,特别是在复杂和多变的海上环境中。
The LaRS dataset was developed by the ViCoS Laboratory at the University of Ljubljana, with the aim of addressing the challenges of data diversity and complexity in maritime obstacle detection. This dataset includes over 4,000 key frames, each annotated with panoptic segmentation labels, covering 8 object categories, 3 background categories, and 19 global scene attributes that describe environmental types, lighting conditions, reflection levels and other relevant characteristics. Furthermore, each key frame is accompanied by its preceding 9 consecutive frames to support the development of methods leveraging temporal texture information. The LaRS dataset is applied to obstacle detection for autonomous unmanned surface vehicles (USV), with the objective of improving detection accuracy and robustness, especially in complex and dynamic maritime environments.
提供机构:
卢布尔雅那大学
创建时间:
2023-08-18
搜集汇总
数据集介绍
构建方式
LaRS数据集的构建采用了多种来源以确保视觉多样性,包括从公共在线视频中收集场景、在多个不同地理位置手动录制新序列,以及从现有海事数据集中纳入最具挑战性的场景。数据集由超过4000个关键帧组成,每个关键帧都配备了9个前帧,以利用时间纹理。每个关键帧都进行了像素级全景标注,包括8个物体类别、3个物质类别和19个全局场景属性。为了确保属性分布的均匀性,数据集被仔细地划分为训练、验证和测试集,并实现了一个在线评估服务器以减少测试集过拟合。
使用方法
使用LaRS数据集的方法包括在训练集上训练模型,使用验证集作为停止准则,并在测试集上评估性能。评估协议包括两个任务:基于语义分割的障碍物检测和基于全景分割的障碍物检测。为了公平比较,测试集的标注信息不会公开,而是通过在线评估服务器提供自动和无偏见的评估。
背景与挑战
背景概述
随着海事行业向自动化无人水面舰船(USV)的转型,对障碍物检测能力的需求日益增长。然而,海事障碍物检测的进展受到缺乏能够充分捕捉一般海事环境复杂性的多样化数据集的阻碍。LaRS数据集应运而生,它是第一个海事全景障碍物检测基准,包含来自湖泊、河流和海洋的场景。该数据集由斯洛文尼亚卢布尔雅那大学的Lojze ˇZust、Janez Perˇs和Matej Kristan等研究人员创建,旨在提供一个具有最大多样性的数据集,包括记录位置、场景类型、障碍物类别和采集条件。LaRS由超过4000个逐像素标记的关键帧组成,每个关键帧都带有8个“thing”类别、3个“stuff”类别和19个全局场景属性的注释。该数据集的发布为研究社区提供了一个强大的工具,以促进海事障碍物检测方法的发展。
当前挑战
LaRS数据集在解决海事障碍物检测领域问题方面面临着多项挑战。首先,海事环境具有动态性,水面反射和阳光闪耀等问题给障碍物检测带来了困难。其次,障碍物的外观变化多样,使得任务更接近于异常检测。此外,现有的检测方法难以处理背景静态障碍物。为了解决这些问题,LaRS数据集采用了全景分割方法,该方法在自动驾驶地面车辆领域已证明非常有效。然而,全景分割在海事感知领域尚未得到充分探索,主要原因是缺乏多样化的、公开可用的、精心策划的全景数据集。LaRS数据集通过其多样性和复杂性,为克服这些挑战提供了新的可能性。
常用场景
经典使用场景
LaRS数据集的经典应用场景是海上障碍物检测。它包含了从湖泊、河流和海洋中提取的场景,每个关键帧都标注了8个物体类别、3个物质类别和19个全局场景属性,并配备了前9帧,以利用时间纹理信息。这使得LaRS数据集成为评估和训练海上障碍物检测算法的理想选择。
解决学术问题
LaRS数据集解决了海上障碍物检测领域缺乏多样化数据集的问题。现有的数据集要么只标注动态障碍物,要么场景多样性不足,限制了海上障碍物检测算法的发展。LaRS数据集通过提供多样化的场景、障碍物类型和获取条件,为海上障碍物检测研究提供了新的可能性。
实际应用
LaRS数据集的实际应用场景包括但不限于:无人水面艇(USV)的自动导航、海洋环境监测、海上垃圾清理、货物运输和民用交通。通过利用LaRS数据集训练的算法,无人水面艇可以更准确地检测和识别海上障碍物,从而实现及时避障,提高航行安全性。
数据集最近研究
最新研究方向
LaRS数据集在海上障碍物检测领域具有开创性意义,它提供了首个包含湖泊、河流和海洋场景的泛视场障碍物检测基准。该数据集在记录地点、场景类型、障碍物类别和采集条件等方面具有最大的多样性,为海上环境感知研究提供了宝贵资源。LaRS数据集包含了超过4000个像素级标注的关键帧,每个关键帧都标注了8种物体类别、3种物质类别和19种全局场景属性。此外,每个关键帧还配备了前9帧,以支持利用时间纹理的方法开发。研究结果表明,基于语义分割的方法在整体分割质量上略优于泛视场分割方法。然而,在处理小障碍物、动态障碍物分类和实例分割方面,现有方法仍有改进空间。LaRS数据集的发布将推动海上障碍物检测领域的发展,为研究者们提供更多机会来探索和改进相关技术。
相关研究论文
- 1LaRS: A Diverse Panoptic Maritime Obstacle Detection Dataset and Benchmark卢布尔雅那大学 · 2023年
以上内容由遇见数据集搜集并总结生成


