baihu-dataset
收藏魔搭社区2026-05-15 更新2026-05-17 收录
下载链接:
https://modelscope.cn/datasets/OpenLoong-Community/baihu-dataset
下载链接
链接失效反馈官方服务:
资源简介:
<a href="https://www.openloong.org.cn/cn?utm_source=referral&utm_medium=gitcode&utm_campaign=data&utm_content=baihu_251223" target="_blank">
<img src="https://raw.atomgit.com/openloong/openloong-dyn-control/files/main/assets/logo.png" width = "30%" height = "30%" />
</a>
***
OpenLoong 项目由国家地方共建人形机器人创新中心发起,是业内首个全栈开源的全尺寸通用人形机器人项目,目前已正式纳入开放原子开源基金会孵化体系,并以 OpenLoong 开源社区作为对外协作与生态共建的核心载体,持续汇聚开发者、企业与科研机构参与共建。
🥳更多信息请访问 [社区官网 ->](https://www.openloong.org.cn/cn?utm_source=referral&utm_medium=gitcode&utm_campaign=data&utm_content=baihu_251223)
<br>
***
<div style="display: flex; justify-content: space-between; align-items: center; width: 100%;">
<div>
<a href="https://www.modelscope.cn/datasets/OpenLoong-Community/baihu-dataset">
<img height="30" src="https://img.shields.io/badge/ModelScope-333333?style=for-the-badge&logo=modelscope&labelColor=624AFF" alt="Modelscope">
</a>
<a href="https://ai.atomgit.com/openloong/baihu-dataset">
<img height="30" src="https://img.shields.io/badge/AtomGit-333333?style=for-the-badge&logo=gitcode&labelColor=E91E3F" alt="Gitcode">
</a>
</div>
</div>
# 白虎数据集
白虎数据集是一个综合性的机器人操作数据集,针对多个机器人平台系统构建。
## 主要特点✨
* 涵盖了多款机器人本体,包括国地中心青龙、傅利叶GR-2、智元A2-D。这些平台涵盖了全尺寸人形机器人、类人形轮式机器人以及机械臂等多种具身平台,展现了其广泛适用性。
* 围绕家具家政、餐饮服务、工业制造、商超药店这些应用场景系统构建,全面覆盖机器人在现实生活和生产中的关键应用领域。
* 构建了多维度任务体系,依托抓取、放置、递交等多种原子技能,通过组合调度实现任务的结构化拆解,从而形成多层级、可跨场景复用的机器人能力框架。
* 数据采集横跨多个具有代表性的机器人本体,每个平台均执行多种任务类型,并在不同真实场景中完成高质量采集,实现了多本体、多任务、跨场景的系统性数据构建。这些数据集系统性地标注了百余种原子技能(如抓取、推动、拉取、递交、放置、插入等),这些技能作为具身智能机器人复杂操作的基础单元,可为模型理解与生成复杂任务行为提供关键的操作表征。
## 数据格式
白虎数据集按照 “场景”- “任务”-"Episode" 结构来存储,基本存储格式为HDF5格式文件。数据集提供了成熟的数据处理工具链,可通过配套的白虎数据集SDK来解析数据,也可以通过配套的可视化工具查看每项详细数据。
| 左手相机 | 头部相机 | 右手相机 |
|----------|----------|----------|
|  |  |  |
## 数据统计
| 末端类型 | 应用场景 |
|----------|----------|
|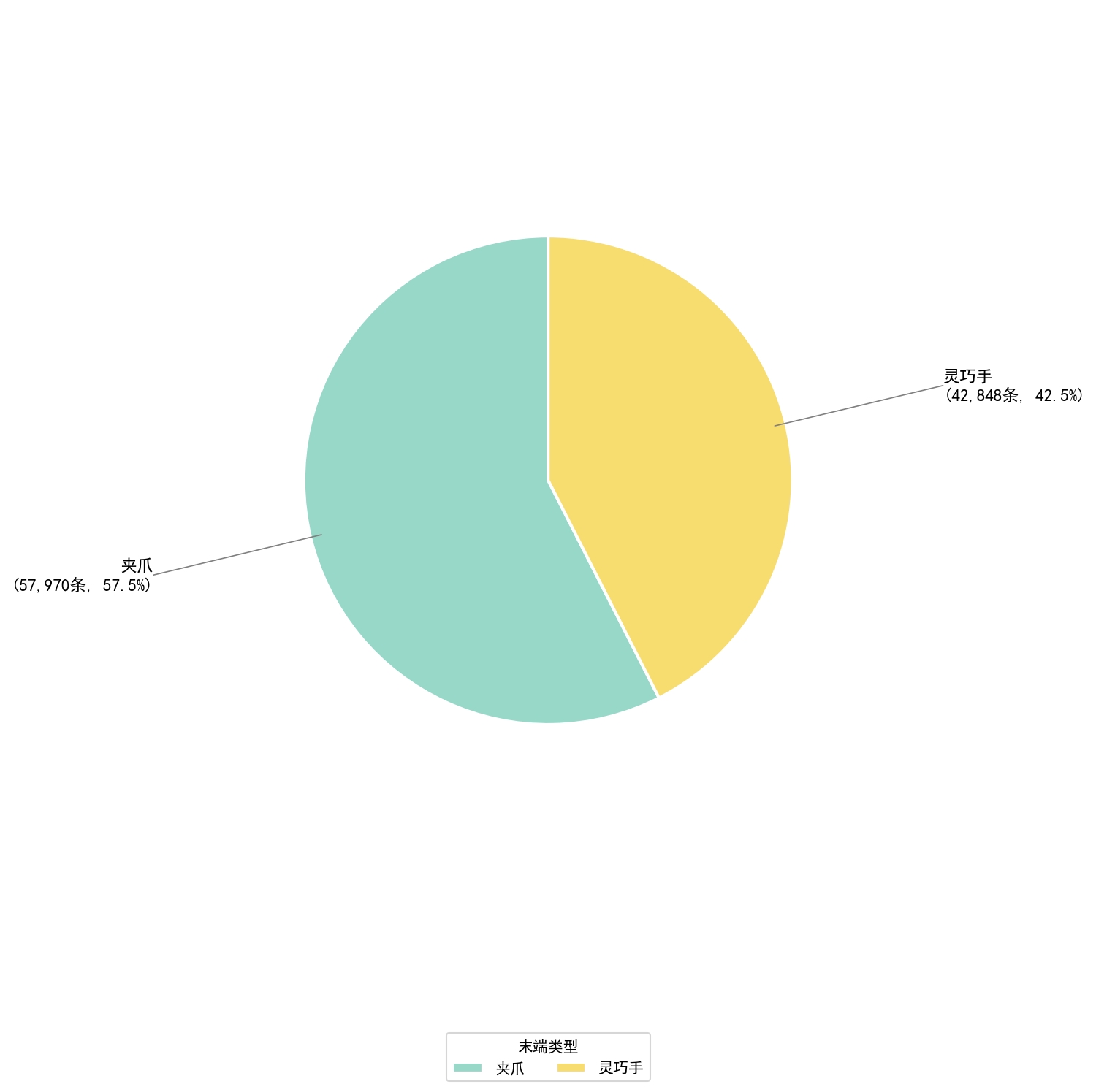|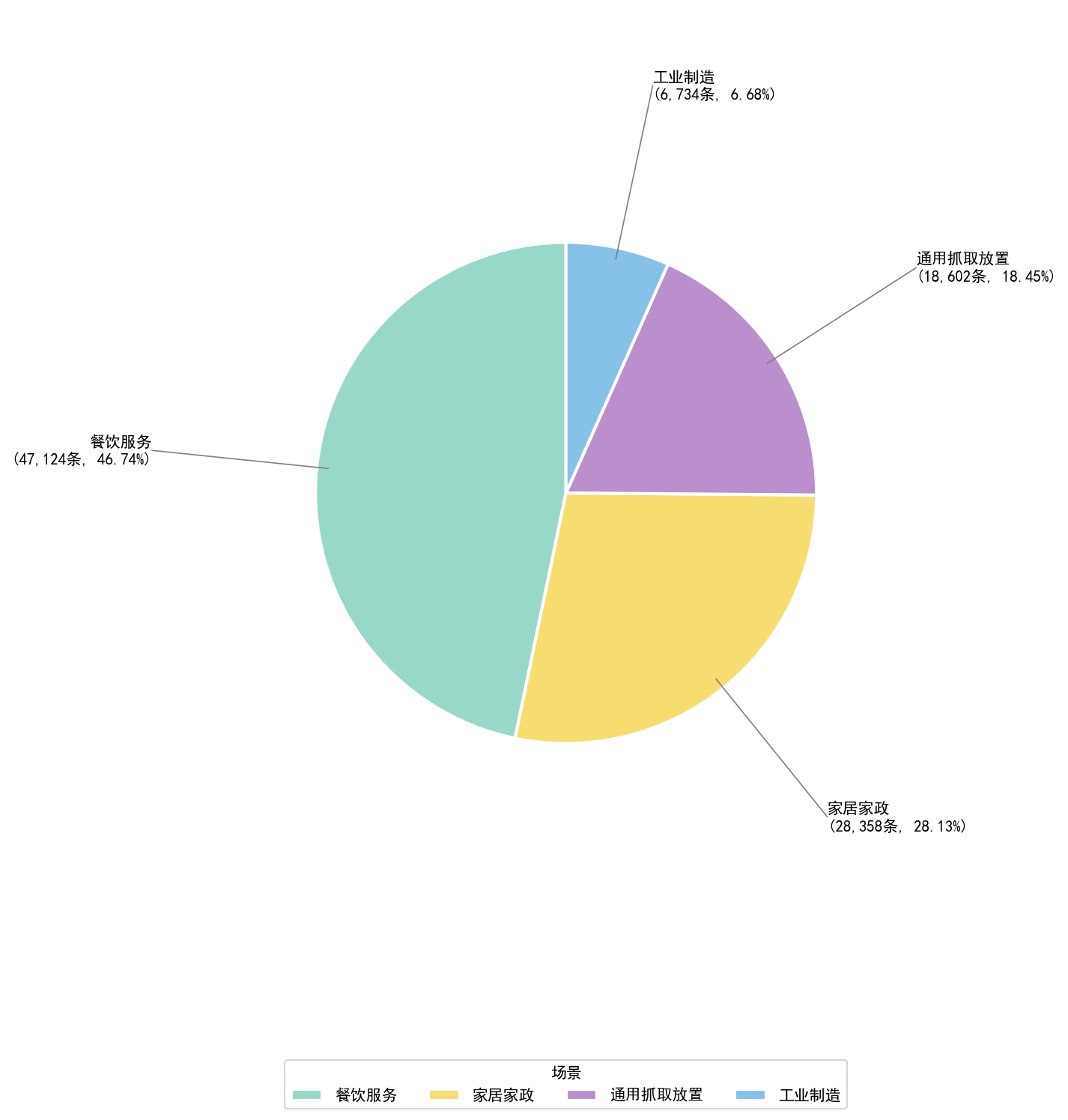|
| 数据量统计(GB) |
|----------|
|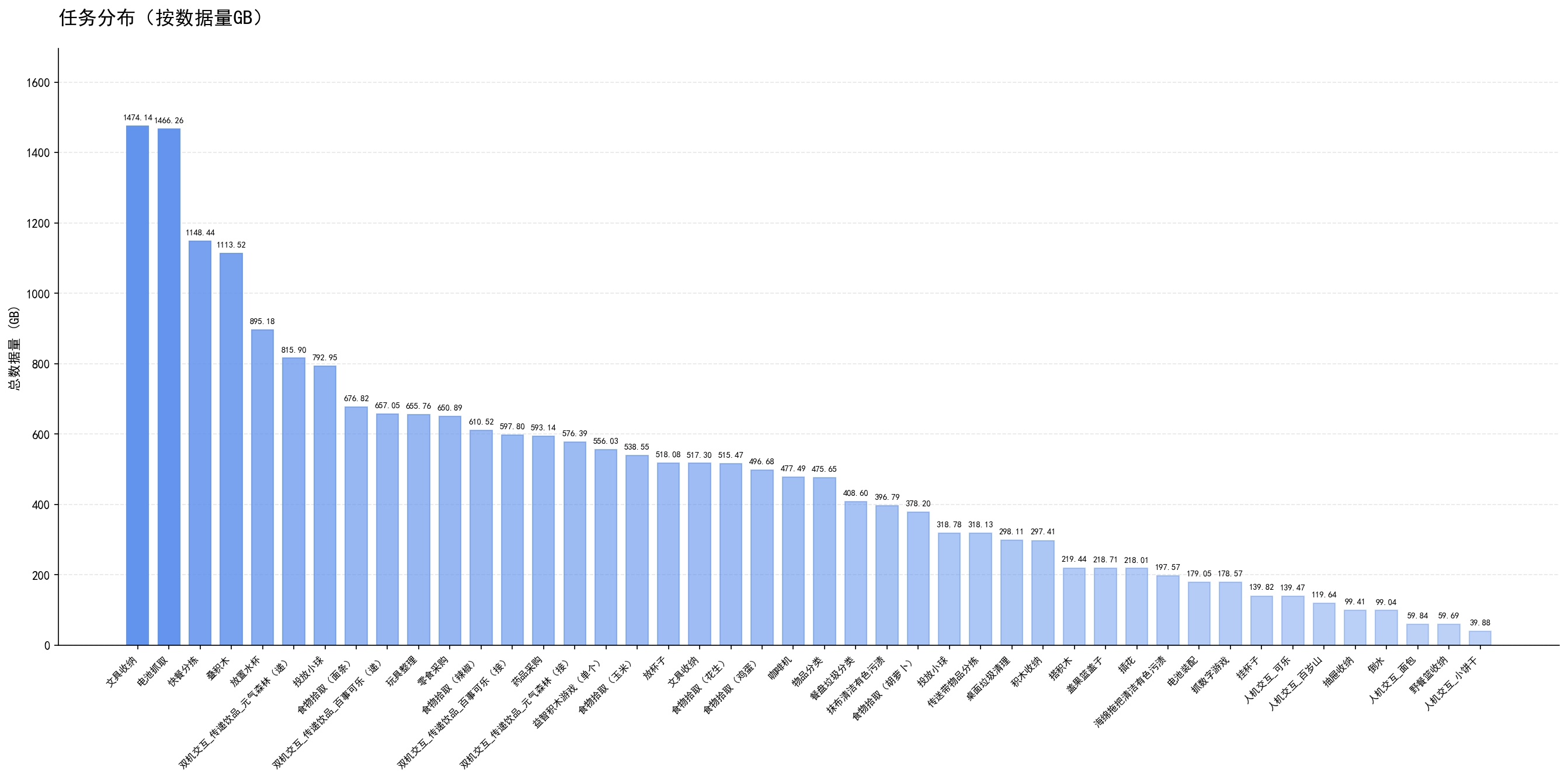|
| 数据量统计(条) |
|----------|
|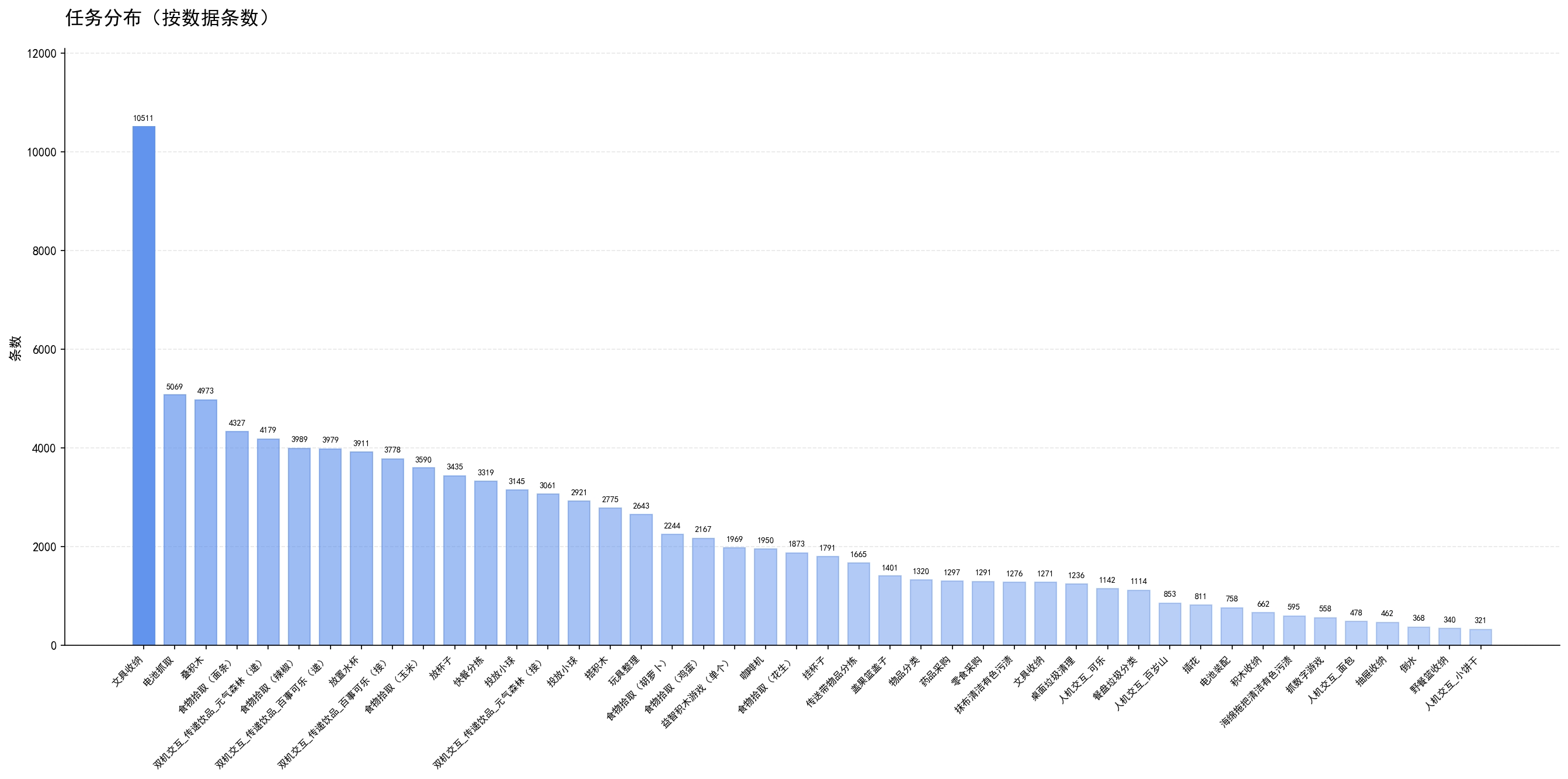|
## 数据集格式说明🔥
### 国地中心青龙
```
cameras // 相机数据
│ ├── hand_left // 左手
│ │ ├── color // 图像信息
│ │ │ ├── data // 图像数组
│ ├── hand_right // 右手
│ │ ├── color // 图像信息
│ │ │ ├── data // 图像数组
│ ├── head // 头部
│ │ ├── color // 图像信息
│ │ │ ├── data // 图像数组
joints // 关节数据
│ ├── action // 关节期望值
│ │ ├── effector // 末端夹爪
│ │ | ├── position // N(行)*2(列);N代表帧数,2代表左右2个末端夹爪
│ │ ├── arm // 臂
│ │ | ├── postion // N(行)*14(列);N代表帧数,14代表左右2个臂的自由度(单臂7自由度)
│ ├── state // 关节实际值
│ │ ├── effector // 末端夹爪
│ │ | ├── position // N(行)*2(列);N代表帧数,2代表左右2个末端夹爪
│ │ ├── arm // 臂
│ │ | ├── postion // N(行)*14(列);N代表帧数,14代表左右2个臂的自由度(单臂7自由度)
│ ├── parameters // 参数信息
│ │ ├── camera // 相机
│ │ │ ├── hand_left.json // 左手相机参数
│ │ │ ├── hand_right.json // 右手相机参数
│ │ │ ├── head.json // 头部相机参数
metadata.json //元数据信息,包含采集设备、末端类型、相机帧率、关节信息等
```
### 傅利叶GR-2
```
cameras // 相机数据
│ ├── head_right //头部右侧相机
│ │ ├── color // 图像信息
│ │ │ ├── data // 图像数组
│ ├── head_left // 头部左侧相机
│ │ ├── color // 图像信息
│ │ │ ├── data // 图像数组
joints // 关节数据
│ ├── action // 关节期望值
│ │ ├── arm // 臂
│ │ | ├── position // N(行)*14(列)
│ │ ├── effector // 手
│ │ | ├── position // N(行)*12(列);N代表帧数,12代表左右2个手的自由度(每只手6自由度)
│ │ ├── end // 腕部末端
│ │ | ├── orientation //末端位姿;
│ │ | ├── position // (N,2,3),三维坐标
│ │ ├── head // 头部
│ │ | ├── position // N(行)*2(列)
│ │ ├── leg // 腿
│ │ | ├── postion // N(行)*12(列);
│ │ ├── robot // 机体
│ │ | ├── angular //角度; N(行)*3(列);
│ │ | ├── orientation //机体姿态;
│ │ | ├── position // N(行)*3(列)
│ │ | ├── velocity // 速度; N(行)*3(列);
│ │ ├── waist // 腰部
│ │ | ├── position // N(行)*1(列);
│ ├── state // 关节实际值
│ │ ├── arm // 臂
│ │ | ├── position // N(行)*14(列)
│ │ ├── effector // 手
│ │ | ├── position // N(行)*12(列);N代表帧数,12代表左右2个手的自由度(每只手6自由度)
│ │ ├── end // 腕部末端
│ │ | ├── orientation //末端位姿;
│ │ | ├── position // (N,2,3),三维坐标
│ │ ├── head // 头部
│ │ | ├── position // N(行)*2(列)
│ │ ├── leg // 腿
│ │ | ├── postion // N(行)*12(列);
│ │ ├── robot // 机体
│ │ | ├── angular //角度; N(行)*3(列);
│ │ | ├── orientation //机体姿态;
│ │ | ├── position // N(行)*3(列)
│ │ | ├── velocity // 速度; N(行)*3(列);
│ │ ├── waist // 腰部
│ │ | ├── position // N(行)*1(列);
│ ├── parameters // 参数信息
│ │ ├── camera // 相机
│ │ │ ├── head_left.json // 头部左侧相机参数
│ │ │ ├── head_right.json // 头部右侧相机参数
metadata.json //元数据信息,包含采集设备、末端类型、相机帧率、关节信息等
```
### 智元A2-D
```
cameras // 相机数据
│ ├── hand_left // 左手相机
│ │ ├── color // RGB图像信息
│ │ │ ├── data // 图像数组
│ ├── hand_right // 右手相机
│ │ ├── color // RGB图像信息
│ │ │ ├── data // 图像数组
│ ├── head // 头部相机
│ │ ├── color // RGB图像信息
│ │ │ ├── data // 图像数组
│ │ └── depth // 深度信息
│ │ │ ├── data // 图像数组
joints // 关节数据
│ ├── action // 关节期望值
│ │ ├── arm // 机械臂
│ │ | ├── position // N(行)*14(列);N代表帧数,14代表左右2个臂的自由度(单臂7自由度)
│ │ ├── effector // 末端
│ │ | ├── position // N(行)*2(列);N代表帧数,2代表左右2个末端
│ │ ├── head // 头部
│ │ | ├── postion // N(行)*2(列);N代表帧数,2代表2个自由度(俯仰和周转)
│ │ ├── robot // 除臂+末端+执行器外的其他关节数据
│ │ | ├── velocity // 机体速度 ,N(行)*2(列);N代表帧数,2代表2个自由度(前进和转向)
│ │ ├── waist // 腰部
│ │ | ├── postion // N(行)*2(列);N代表帧数,2代表2个自由度(俯仰和升程)
│ ├── state // 关节实际值
│ │ ├── arm // 机械臂
│ │ | ├── position // N(行)*14(列);N代表帧数,14代表左右2个臂的自由度(单臂7自由度)
│ │ ├── effector // 末端
│ │ | ├── position // N(行)*2(列);N代表帧数,2代表左右2个末端
│ │ ├── head // 头部
│ │ | ├── postion // N(行)*2(列);N代表帧数,2代表2个自由度(俯仰和周转)
│ │ ├── robot // 除臂+末端+执行器外的其他关节数据
│ │ | ├── velocity // 机体速度 ,N(行)*2(列);N代表帧数,2代表2个自由度(前进和转向)
│ │ ├── waist // 腰部
│ │ | ├── postion // N(行)*2(列);N代表帧数,2代表2个自由度(俯仰和升程)
parameters // 传感器外参
│ ├── camera //
│ | ├── hand_left_params.json // 左手相机参数,包括内参、外参
│ | ├── hand_right_params.json // 右手相机参数,包括内参、外参
│ | ├── head_params.json // 头部相机参数,包括内参、外参
metadata.json //元数据信息,包含采集设备、末端类型、相机帧率、关节信息等
```
<a href="https://www.openloong.org.cn/cn?utm_source=referral&utm_medium=gitcode&utm_campaign=data&utm_content=baihu_251223" target="_blank">
<img src="https://raw.atomgit.com/openloong/openloong-dyn-control/files/main/assets/logo.png" width = "30%" height = "30%" />
</a>
***
OpenLoong项目由国家地方共建人形机器人创新中心牵头发起,是行业内首个全栈开源的全尺寸通用人形机器人项目。目前该项目已正式纳入开放原子开源基金会孵化体系,以OpenLoong开源社区作为对外协作与生态共建的核心平台,持续汇聚开发者、企业及科研机构共同参与建设。
🥳更多信息请访问 [社区官网 ->](https://www.openloong.org.cn/cn?utm_source=referral&utm_medium=gitcode&utm_campaign=data&utm_content=baihu_251223)
<br>
***
<div style="display: flex; justify-content: space-between; align-items: center; width: 100%;">
<div>
<a href="https://www.modelscope.cn/datasets/OpenLoong-Community/baihu-dataset">
<img height="30" src="https://img.shields.io/badge/ModelScope-333333?style=for-the-badge&logo=modelscope&labelColor=624AFF" alt="Modelscope">
</a>
<a href="https://ai.atomgit.com/openloong/baihu-dataset">
<img height="30" src="https://img.shields.io/badge/AtomGit-333333?style=for-the-badge&logo=gitcode&labelColor=E91E3F" alt="Gitcode">
</a>
</div>
</div>
# 白虎数据集(Baihu Dataset)
白虎数据集是一款面向多机器人平台的综合性机器人操作数据集。
## 主要特点✨
* **覆盖多类型具身机器人平台**:涵盖国地中心青龙、傅利叶GR-2、智元A2-D三款机器人本体,包含全尺寸人形机器人、类人形轮式机器人与机械臂等多种形态,充分体现数据集的广泛适配性。
* **覆盖多核心应用场景**:围绕家居家政、餐饮服务、工业制造、商超零售与医药服务等典型场景系统搭建,全面覆盖机器人在民生服务与工业生产中的关键应用赛道。
* **构建多维度任务体系**:以抓取、放置、递交等基础原子技能为核心单元,通过组合调度实现任务的结构化拆解,形成多层级、可跨场景复用的机器人操作能力框架。
* **系统性多源数据采集**:针对多款代表性机器人本体采集数据,每个平台均完成多类型任务的真实场景高质量采集,实现多本体、多任务、跨场景的系统化数据构建。数据集共标注百余类原子操作技能(涵盖抓取、推动、拉取、递交、放置、插入等),此类技能作为具身智能机器人完成复杂操作的基础单元,可为大语言模型(Large Language Model, LLM)理解与生成复杂任务行为提供关键的操作表征依据。
## 数据格式
数据集采用「场景-任务-Episode」三级结构进行组织,基础存储格式为HDF5文件。配套提供完整的数据处理工具链,可通过专属的白虎数据集SDK完成数据解析,亦可通过配套可视化工具查看单条数据的详细信息。
| 左手相机 | 头部相机 | 右手相机 |
|----------|----------|----------|
|  |  |  |
## 数据统计
| 末端类型 | 应用场景 |
|----------|----------|
|||
| 数据量统计(GB) |
|----------|
||
| 数据量统计(条) |
|----------|
||
## 数据集格式说明🔥
### 国地中心青龙机器人
cameras // 相机数据
│ ├── hand_left // 左手
│ │ ├── color // 图像信息
│ │ │ ├── data // 图像数组
│ ├── hand_right // 右手
│ │ ├── color // 图像信息
│ │ │ ├── data // 图像数组
│ ├── head // 头部
│ │ ├── color // 图像信息
│ │ │ ├── data // 图像数组
joints // 关节数据
│ ├── action // 关节期望值
│ │ ├── effector // 末端夹爪
│ │ | ├── position // N(行)*2(列);N代表帧数,2代表左右2个末端夹爪
│ │ ├── arm // 臂
│ │ | ├── postion // N(行)*14(列);N代表帧数,14代表左右2个臂的自由度(单臂7自由度)
│ ├── state // 关节实际值
│ │ ├── effector // 末端夹爪
│ │ | ├── position // N(行)*2(列);N代表帧数,2代表左右2个末端夹爪
│ │ ├── arm // 臂
│ │ | ├── postion // N(行)*14(列);N代表帧数,14代表左右2个臂的自由度(单臂7自由度)
│ ├── parameters // 参数信息
│ │ ├── camera // 相机
│ │ │ ├── hand_left.json // 左手相机参数
│ │ │ ├── hand_right.json // 右手相机参数
│ │ │ ├── head.json // 头部相机参数
metadata.json //元数据信息,包含采集设备、末端类型、相机帧率、关节信息等
### 傅利叶GR-2机器人
cameras // 相机数据
│ ├── head_right //头部右侧相机
│ │ ├── color // 图像信息
│ │ │ ├── data // 图像数组
│ ├── head_left // 头部左侧相机
│ │ ├── color // 图像信息
│ │ │ ├── data // 图像数组
joints // 关节数据
│ ├── action // 关节期望值
│ │ ├── arm // 臂
│ │ | ├── position // N(行)*14(列)
│ │ ├── effector // 手
│ │ | ├── position // N(行)*12(列);N代表帧数,12代表左右2个手的自由度(每只手6自由度)
│ │ ├── end // 腕部末端
│ │ | ├── orientation //末端位姿;
│ │ | ├── position // (N,2,3),三维坐标
│ │ ├── head // 头部
│ │ | ├── position // N(行)*2(列)
│ │ ├── leg // 腿
│ │ | ├── postion // N(行)*12(列);
│ │ ├── robot // 机体
│ │ | ├── angular //角度; N(行)*3(列);
│ │ | ├── orientation //机体姿态;
│ │ | ├── position // N(行)*3(列)
│ │ | ├── velocity // 速度; N(行)*3(列);
│ │ ├── waist // 腰部
│ │ | ├── position // N(行)*1(列);
│ ├── state // 关节实际值
│ │ ├── arm // 臂
│ │ | ├── position // N(行)*14(列)
│ │ ├── effector // 手
│ │ | ├── position // N(行)*12(列);N代表帧数,12代表左右2个手的自由度(每只手6自由度)
│ │ ├── end // 腕部末端
│ │ | ├── orientation //末端位姿;
│ │ | ├── position // (N,2,3),三维坐标
│ │ ├── head // 头部
│ │ | ├── position // N(行)*2(列)
│ │ ├── leg // 腿
│ │ | ├── postion // N(行)*12(列);
│ │ ├── robot // 机体
│ │ | ├── angular //角度; N(行)*3(列);
│ │ | ├── orientation //机体姿态;
│ │ | ├── position // N(行)*3(列)
│ │ | ├── velocity // 速度; N(行)*3(列);
│ │ ├── waist // 腰部
│ │ | ├── position // N(行)*1(列);
│ ├── parameters // 参数信息
│ │ ├── camera // 相机
│ │ │ ├── head_left.json // 头部左侧相机参数
│ │ │ ├── head_right.json // 头部右侧相机参数
metadata.json //元数据信息,包含采集设备、末端类型、相机帧率、关节信息等
### 智元A2-D机器人
cameras // 相机数据
│ ├── hand_left // 左手相机
│ │ ├── color // RGB图像信息
│ │ │ ├── data // 图像数组
│ ├── hand_right // 右手相机
│ │ ├── color // RGB图像信息
│ │ │ ├── data // 图像数组
│ ├── head // 头部相机
│ │ ├── color // RGB图像信息
│ │ │ ├── data // 图像数组
│ │ └── depth // 深度信息
│ │ │ ├── data // 图像数组
joints // 关节数据
│ ├── action // 关节期望值
│ │ ├── arm // 机械臂
│ │ | ├── position // N(行)*14(列);N代表帧数,14代表左右2个臂的自由度(单臂7自由度)
│ │ ├── effector // 末端
│ │ | ├── position // N(行)*2(列);N代表帧数,2代表左右2个末端
│ │ ├── head // 头部
│ │ | ├── postion // N(行)*2(列);N代表帧数,2代表2个自由度(俯仰和周转)
│ │ ├── robot // 除臂+末端+执行器外的其他关节数据
│ │ | ├── velocity // 机体速度 ,N(行)*2(列);N代表帧数,2代表2个自由度(前进和转向)
│ │ ├── waist // 腰部
│ │ | ├── postion // N(行)*2(列);N代表帧数,2代表2个自由度(俯仰和升程)
│ ├── state // 关节实际值
│ │ ├── arm // 机械臂
│ │ | ├── position // N(行)*14(列);N代表帧数,14代表左右2个臂的自由度(单臂7自由度)
│ │ ├── effector // 末端
│ │ | ├── position // N(行)*2(列);N代表帧数,2代表左右2个末端
│ │ ├── head // 头部
│ │ | ├── postion // N(行)*2(列);N代表帧数,2代表2个自由度(俯仰和周转)
│ │ ├── robot // 除臂+末端+执行器外的其他关节数据
│ │ | ├── velocity // 机体速度 ,N(行)*2(列);N代表帧数,2代表2个自由度(前进和转向)
│ │ ├── waist // 腰部
│ │ | ├── postion // N(行)*2(列);N代表帧数,2代表2个自由度(俯仰和升程)
parameters // 传感器外参
│ ├── camera //
│ | ├── hand_left_params.json // 左手相机参数,包括内参、外参
│ | ├── hand_right_params.json // 右手相机参数,包括内参、外参
│ | ├── head_params.json // 头部相机参数,包括内参、外参
metadata.json //元数据信息,包含采集设备、末端类型、相机帧率、关节信息等
提供机构:
maas
创建时间:
2026-02-07


