RealSee3D
收藏github2025-11-28 更新2025-11-29 收录
下载链接:
https://github.com/realsee-developer/RealSee3D
下载链接
链接失效反馈官方服务:
资源简介:
RealSee3D是一个大规模多视角RGB-D数据集,包含10,000个室内场景,结合了3D激光雷达相机捕获的真实世界住宅场景和程序生成的场景。数据集包含95,962个房间和299,073个视点/RGB-D对,提供全景RGB-D捕获、完整的房间级覆盖、CAD图纸、平面图、语义分割、3D检测标签等全面注释。
RealSee3D is a large-scale multi-view RGB-D dataset encompassing 10,000 indoor scenes, integrating real-world residential scenes captured by 3D LiDAR cameras and procedurally generated scenes. The dataset comprises 95,962 rooms and 299,073 viewpoint/RGB-D pairs, and provides comprehensive annotations including panoramic RGB-D captures, complete room-level coverage, CAD drawings, floor plans, semantic segmentation annotations, and 3D detection labels.
创建时间:
2025-11-12
原始信息汇总
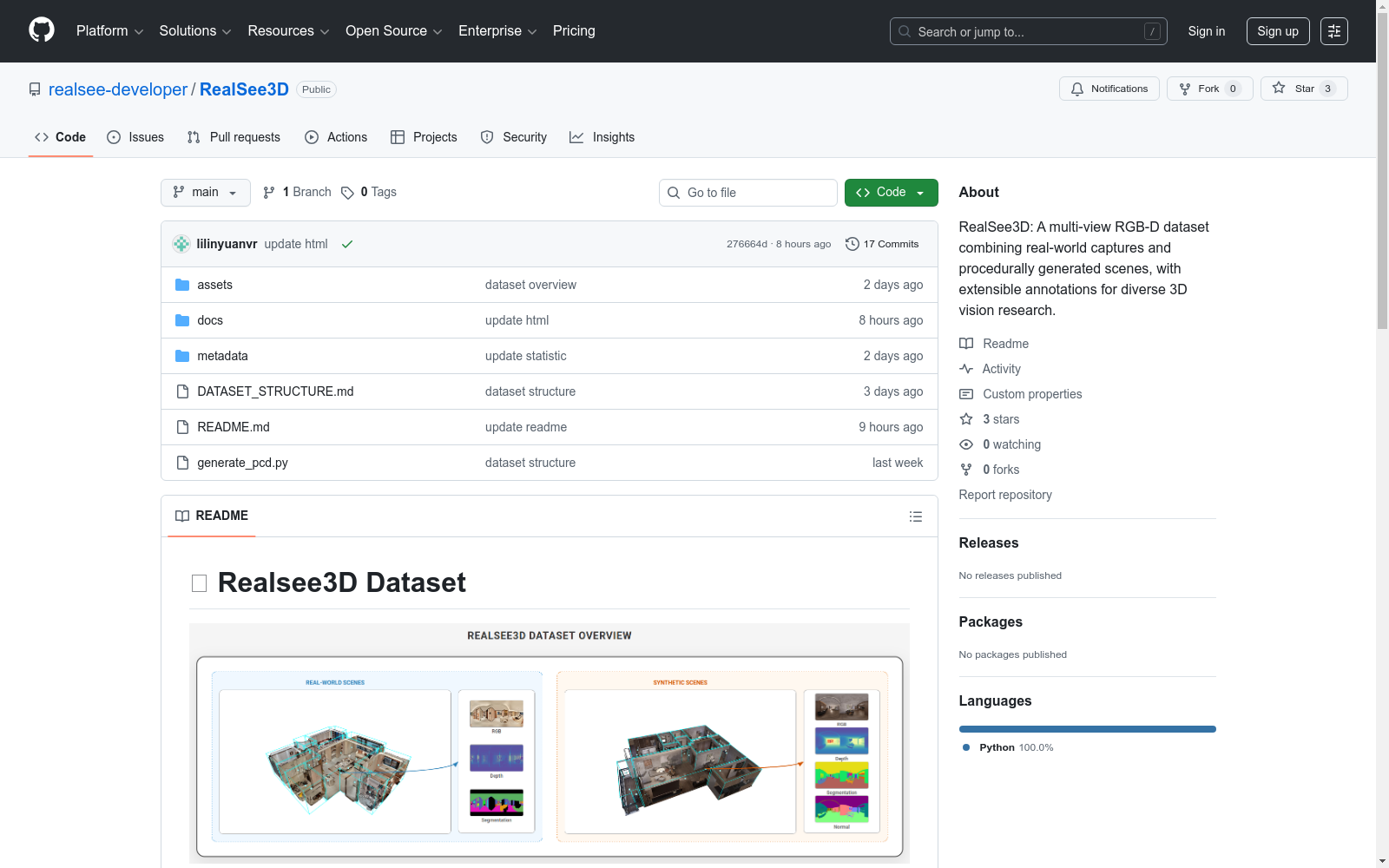
Realsee3D 数据集概述
数据集简介
Realsee3D 是一个大规模多视角 RGB-D 数据集,包含 10,000 个室内场景,由 3D LiDAR 相机采集的真实住宅场景和程序生成的场景组成。
核心特征
- 大规模数据:包含 10,000 个独特室内场景,95,962 个房间和 299,073 个视点/RGB-D 对
- 丰富数据类型:具有完整房间覆盖度的全景 RGB-D 采集数据
- 全面标注:包含 CAD 图纸、平面图、语义分割、3D 检测标签等(即将发布)
- 多样化场景:包含 1,000 个具有不同布局和装饰风格的真实场景,以及 9,000 个使用 100 多种设计师策划风格模板程序生成的场景
数据组织与访问
数据结构
数据集按单个场景组织,每个场景包含详细的多视角 RGB-D 数据
下载方式
访问数据集需要签署数据使用协议(PDF 格式)。请将使用意图说明发送至 developer@realsee.com,申请通过后将收到数据使用协议 PDF、下载说明和链接
数据集统计
详细的数据集统计信息请参考:https://github.com/realsee-developer/RealSee3D/blob/main/metadata/README.md
版本更新
- 2025-11-28:数据集介绍和官方网站发布
引用规范
bibtex @inproceedings{realsee3d, title={Realsee3D: A Large-Scale Multi-View RGB-D Dataset of Indoor Scenes}, author={Linyuan Li, Cihui Pan, Tong Rao, Jie Zhou, Yan Wu, Xi Li, Lingli Wang et al.}, booktitle={}, year={2026} }
许可证信息
- 数据集许可证:知识共享署名-非商业性使用-相同方式共享 4.0 国际许可证 (https://creativecommons.org/licenses/by-nc-sa/4.0/)
- 代码许可证:数据解析、可视化和评估的配套代码基于 MIT 许可证发布 (https://opensource.org/licenses/MIT)
搜集汇总
数据集介绍
构建方式
在室内三维感知研究领域,RealSee3D数据集通过融合真实采集与程序生成技术构建而成。该数据集包含一万个室内场景,其中一千个场景利用三维激光雷达相机对真实住宅环境进行全景扫描,完整捕捉了多样化的空间布局与装饰风格;其余九千个场景则采用程序化生成方法,基于百余种设计师精心设计的风格模板,系统化地组合家具模型与材质,确保了场景的多样性与数据分布的广泛性。
特点
作为大规模多视角RGB-D数据集,RealSee3D展现出显著的数据完备性与标注深度。其囊括近三十万组视点数据与九万余个房间单元,每个场景均配备全景RGB-D采集数据及完整的房间级覆盖。数据集不仅提供CAD图纸与平面布局等基础标注,还包含语义分割与三维检测标签等多维度注释,真实场景与程序生成场景的有机结合,为模型训练提供了兼具真实性与泛化能力的测试平台。
使用方法
研究者可通过签署数据使用协议获取该数据集,具体流程需向指定邮箱提交使用申请说明。数据集按场景单元进行组织,每个场景包含多视角RGB-D数据及配套标注文件,详细的数据结构说明与使用指南可通过项目文档获取。该数据集遵循非商业性共享许可,适用于室内三维理解、场景重建等研究方向,为计算机视觉算法验证提供了标准化数据基准。
背景与挑战
背景概述
三维视觉领域在室内场景理解方面长期面临真实数据稀缺的瓶颈,RealSee3D数据集于2025年由Li Linyuan、Pan Cihui等学者联合发布,通过融合激光雷达采集的真实场景与程序化生成的合成场景,构建了包含十万间室内空间的多视角RGB-D数据库。该数据集以全景深度感知与完整空间覆盖为特色,为三维目标检测、语义分割等任务提供了前所未有的数据支撑,显著推动了智能家居、机器人导航等应用领域的技术发展。
当前挑战
室内三维重建需应对复杂光照反射与遮挡关系带来的深度感知误差,RealSee3D在解决此问题时面临多视角数据对齐与语义标注一致性的技术难题。数据集构建过程中,真实场景采集需克服激光雷达在狭小空间的扫描盲区,而程序化生成则需平衡风格模板多样性与其物理合理性,同时大规模数据的存储结构与隐私保护机制亦构成系统性挑战。
常用场景
经典使用场景
在室内场景理解领域,RealSee3D数据集凭借其万级室内场景规模与多视角RGB-D数据,成为三维视觉研究的基准测试平台。该数据集通过融合真实采集与程序生成的双重数据源,为场景重建、语义分割等任务提供密集的立体视觉标注,其全景深度信息与房间级覆盖特性,使研究者能够构建精确的室内几何模型并解析复杂空间结构。
衍生相关工作
该数据集的发布催生了多项三维视觉领域的创新研究。基于其多视角RGB-D序列开发的神经辐射场技术,实现了照片级真实感的室内场景新视图合成;部分团队利用其语义标注体系构建了层次化场景图生成模型,推动了场景理解与推理的深度融合。在跨模态学习方向,结合CAD图纸与实景数据的联合建模方法,已成为室内场景生成领域的重要技术路线。
数据集最近研究
最新研究方向
在室内三维感知领域,Realsee3D数据集凭借其大规模真实与合成场景融合的特性,正推动多模态学习与生成式模型的前沿探索。研究者们聚焦于利用其全景RGB-D数据与丰富标注,开发跨视图几何一致性算法,以提升三维重建的精度与效率。同时,该数据集支持室内场景理解任务的突破,如语义分割与物体检测的联合优化,为智能家居与机器人导航提供关键数据支撑。其风格多样的合成场景进一步促进了领域自适应方法的研究,确保模型在复杂现实环境中的泛化能力,对计算机视觉与增强现实应用产生深远影响。
以上内容由遇见数据集搜集并总结生成


