CODrone
收藏github2025-04-29 更新2025-04-30 收录
下载链接:
https://github.com/AHideoKuzeA/CODrone-A-Comprehensive-Oriented-Object-Detection-benchmark-for-UAV
下载链接
链接失效反馈官方服务:
资源简介:
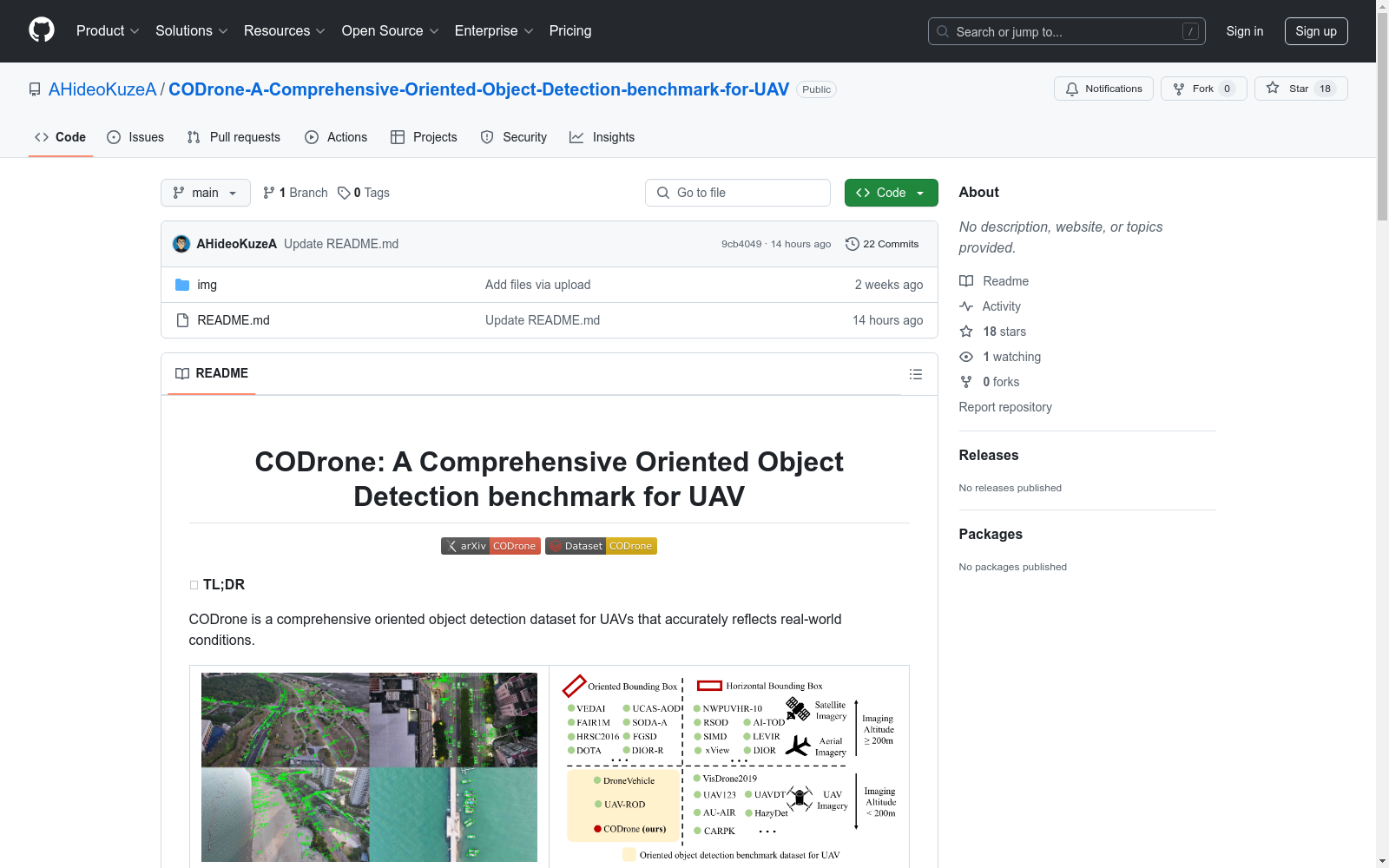
CODrone是一个面向无人机的综合定向物体检测数据集,准确反映了真实世界条件。它包括超过一万张无人机拍摄的图像,具有精确的定向边界框注释和多样化的物体类别。该数据集考虑了多个影响因素,包括图像采集高度、相机视角、光照条件和地理位置。
CODrone is a comprehensive oriented object detection dataset tailored for drones, which accurately reflects real-world scenarios. It contains over 10,000 images captured by drones, with precisely annotated oriented bounding boxes and diverse object categories. This dataset takes into account multiple influencing factors, including image acquisition altitude, camera perspective, lighting conditions, and geographic location.
创建时间:
2025-04-14
原始信息汇总
CODrone数据集概述
数据集简介
- 名称: CODrone (A Comprehensive Oriented Object Detection benchmark for UAV)
- 类型: 无人机(UAV)定向目标检测数据集
- 特点: 大规模、高分辨率、多场景、多角度
关键贡献
- 提出大规模高分辨率无人机定向目标检测数据集
- 包含精确的定向边界框标注和多样化对象类别
- 考虑多种影响因素:
- 图像采集高度
- 相机视角
- 光照条件
- 地理位置
数据集特性
基础信息
- 分辨率: 3840×2160
- 类别数: 12
- 图像数量: 10.0k
- 对象数量: 596.7k
- 标注类型: 定向边界框(OBB)
比较优势
| 维度 | CODrone | 其他数据集 |
|---|---|---|
| 分辨率 | 3840×2160 | 最高2000×1500 |
| 类别数 | 12 | 最多10 |
| 高度差 | 70m | 最高60m |
| 相机角度 | 60° | 最高45° |
数据特点
-
高分辨率优势
- 采用3840×2160高分辨率机载相机
- 与现代无人机硬件能力匹配
-
多高度多角度采集
- 飞行高度: 30m/60m/100m
- 相机角度: 30°/90°
- 共6种独特视点组合
-
多样化场景
- 覆盖城市区域、乡村城镇、港口和工业区等
- 包含现实无人机应用中大多数场景类型
数据集结构
CODrone/ ├── test/ │ ├── annfile/ # DOTA格式标注 │ ├── images/ │ └── labels/ # VOC格式标注 ├── train/ │ ├── annfile/ │ ├── images/ │ └── labels/ └── val/ ├── annfile/ ├── images/ └── labels/
下载链接
引用格式
bibtex @misc{ye2025clearflexibleprecisecomprehensive, title={More Clear, More Flexible, More Precise: A Comprehensive Oriented Object Detection benchmark for UAV}, author={Kai Ye and Haidi Tang and Bowen Liu and Pingyang Dai and Liujuan Cao and Rongrong Ji}, year={2025}, eprint={2504.20032}, archivePrefix={arXiv}, primaryClass={cs.CV}, url={https://arxiv.org/abs/2504.20032}, }
许可协议
- CC BY-NC-SA 4.0 (署名-非商业性使用-相同方式共享 4.0 国际)
- 仅限学术研究使用
搜集汇总
数据集介绍
构建方式
CODrone数据集构建采用无人机搭载3840×2160高分辨率摄像头,在30°和90°两种相机角度及30米、60米、100米三种飞行高度下采集图像,形成6种视角组合。数据覆盖城市、乡村、港口等多样化场景,通过专业标注团队对12类目标进行旋转框标注,同时记录每张图像的飞行高度和相机角度参数,构建过程严格遵循航空摄影测量规范。
特点
该数据集以3840×2160超高分辨率呈现无人机航拍图像,显著优于同类数据集。其核心优势在于多维度飞行参数标注、丰富场景覆盖及精细目标标注:包含12类旋转目标共计59.67万实例,每个样本均标注飞行高度与相机角度,支持姿态感知研究。数据采集跨越70米高度差与60°视角变化,真实模拟复杂飞行工况,为算法鲁棒性验证提供理想测试平台。
使用方法
数据集按DOTA和VOC两种格式组织,用户可通过test/train/val目录获取图像及对应标注文件。研究者可利用旋转框标注开展定向目标检测算法开发,结合飞行高度和角度元数据进行多模态感知研究。高分辨率图像支持细粒度分析任务,建议采用滑动窗口或金字塔策略处理。基准测试表明,该数据集对现有SOTA方法构成显著挑战,特别适合评估算法在尺度变化和视角变异下的性能表现。
背景与挑战
背景概述
CODrone数据集由厦门大学的研究团队于2025年提出,旨在解决无人机视角下定向目标检测的关键问题。该数据集以3840×2160的超高分辨率图像为基础,覆盖12类常见目标,包含超过59万实例标注,显著超越了VisDrone、UAVDT等现有无人机数据集。研究团队创新性地引入了多高度(30-100米)和多角度(30°/90°)采集策略,真实模拟了城市、港口等复杂场景下无人机感知的挑战。作为首个系统性考虑飞行姿态参数的大规模定向检测基准,CODrone为无人机自主导航、广域监控等应用提供了重要数据支撑,其多维度标注体系推动了计算机视觉与机器人感知的交叉研究。
当前挑战
在领域问题层面,CODrone需应对无人机视角特有的三大挑战:低空目标的密集遮挡导致检测模糊、大俯仰角引发的目标形变、以及跨高度检测的尺度敏感性。数据构建过程中,研究团队克服了超高分辨率图像标注效率低下、多角度目标方向一致性验证困难等技术瓶颈,创新开发了半自动标注流水线。此外,为保持数据多样性,需平衡12类目标在6种飞行配置下的分布,这对采样策略提出了严苛要求。数据集最终实现的70米高度差与60度视角跨度,为后续研究建立了极具挑战性的评估基准。
常用场景
经典使用场景
在无人机视觉感知领域,CODrone数据集以其高分辨率和多角度拍摄特性,成为评估定向目标检测算法的黄金标准。该数据集通过模拟真实飞行场景中的多样化条件,如不同海拔高度、光照变化及复杂地理环境,为算法在复杂背景下的鲁棒性测试提供了理想平台。其标注的定向边界框尤其适用于研究旋转敏感的目标识别任务,如交通监控中的车辆姿态分析。
衍生相关工作
基于CODrone的基准测试催生了多项创新研究,包括基于视角不变性的检测框架VPDet、融合海拔信息的自适应网络AltNet等。其多模态特性启发了跨传感器融合研究,如激光雷达与视觉数据的联合标注方法。数据集构建方法论也被扩展至卫星图像分析领域,形成系列衍生数据集如SatDrone。
数据集最近研究
最新研究方向
随着无人机技术的飞速发展,面向无人机平台的定向目标检测技术正成为计算机视觉领域的前沿热点。CODrone数据集以其高分辨率、多视角和多样化的场景覆盖,为这一领域的研究提供了重要支撑。当前研究主要聚焦于如何利用该数据集的高分辨率特性提升小目标检测精度,以及探索多高度和多角度条件下的模型泛化能力。与此同时,结合无人机特有的飞行姿态感知任务,研究人员正在开发能够自适应不同拍摄条件的智能检测算法。这一方向的研究不仅推动了无人机在智慧城市、交通监控等领域的应用,也为复杂场景下的目标检测提供了新的技术路线。
以上内容由遇见数据集搜集并总结生成


