AquaticVision
收藏arXiv2025-05-06 更新2025-05-08 收录
下载链接:
https://sites.google.com/view/aquaticvision-lias
下载链接
链接失效反馈官方服务:
资源简介:
AquaticVision是一个包含事件相机数据和传统相机帧的海洋环境下的视觉SLAM数据集,用于水下视觉定位的基准测试。数据集由香港中文大学(深圳)数据科学学院的研究人员创建,包括9个数据序列,每个序列均包含事件相机数据、传统相机帧以及IMU测量数据。数据集的创建目的是为了提供更可靠的真实轨迹,以帮助研究人员验证水下视觉SLAM算法的定位准确性和性能。
AquaticVision is a visual SLAM dataset designed for underwater visual localization benchmarking, collected in marine environments and encompassing event camera data and conventional camera frames. Developed by researchers from the School of Data Science, The Chinese University of Hong Kong, Shenzhen (CUHK-Shenzhen), the dataset comprises 9 data sequences, each of which includes event camera data, conventional camera frames, and IMU measurement data. This dataset is constructed to provide more reliable ground-truth trajectories, enabling researchers to validate the localization accuracy and performance of underwater visual SLAM algorithms.
提供机构:
香港中文大学(深圳)数据科学学院
创建时间:
2025-05-06
原始信息汇总
AquaticVision-LIAS 数据集概述
数据集简介
- 首个包含事件、帧和IMU数据的水下数据集
- 提供地面真实文件用于评估水下视觉SLAM或里程计性能
- 旨在帮助研究人员验证算法在水下环境中的定位精度和性能
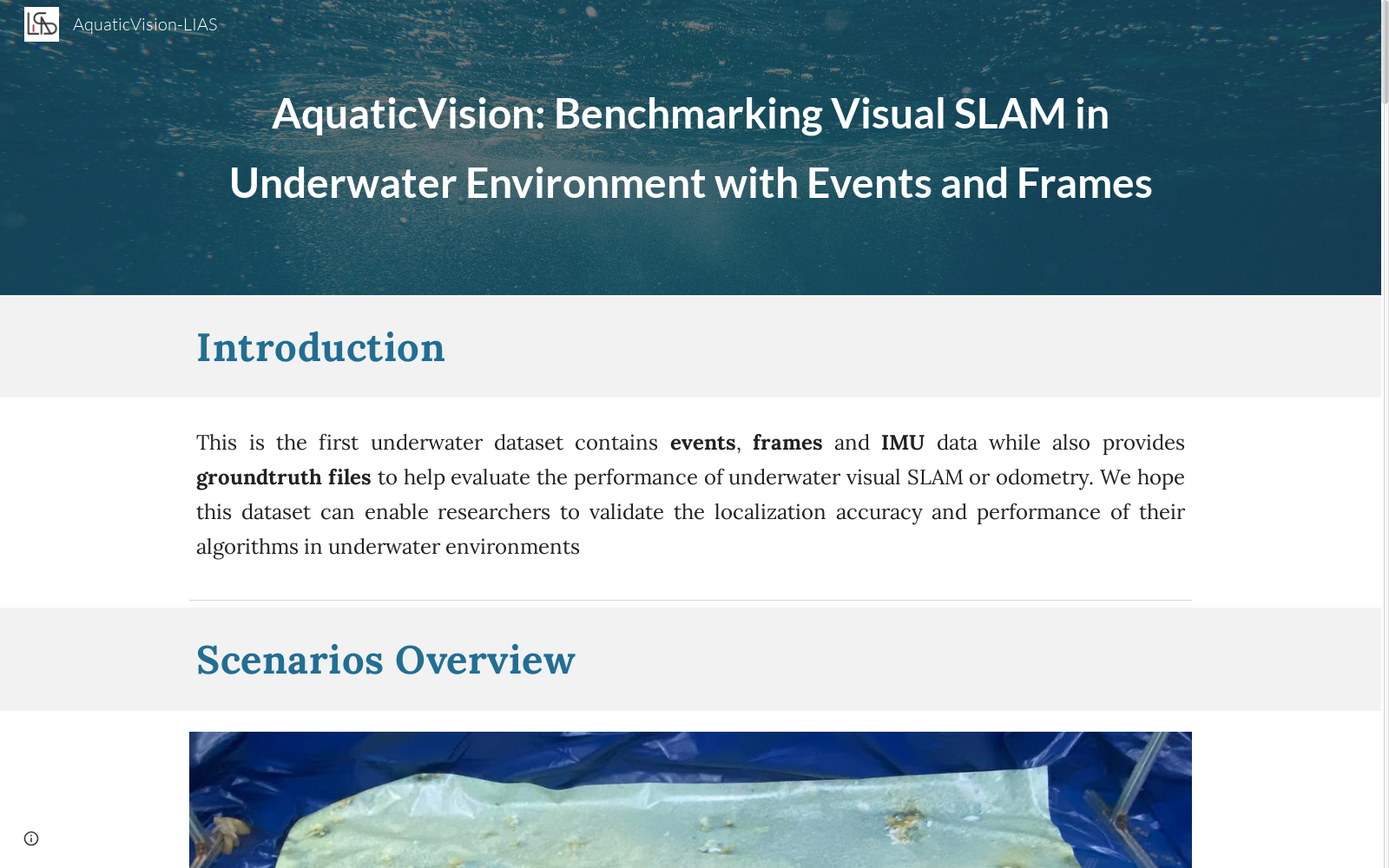
场景概述
- 实验池底部用于数据收集
- 包含多种实验场景
数据集下载
简单序列
-
01_Scan_with_board
- 环境:清水,珊瑚均匀分布,轨迹覆盖水下区域
- 下载:01.mp4
-
02_Cross1_with_board
- 环境:清水,珊瑚集中分布,十字形轨迹
- 下载:02.mp4
-
03_Cross2_no_board
- 环境:清水,珊瑚均匀分布,十字形轨迹
- 下载:03.mp4
-
04_Loop1_with_board
- 环境:清水,珊瑚均匀分布,环形轨迹
- 下载:04.mp4
-
05_Loop2_no_board
- 环境:清水,珊瑚集中分布,环形轨迹
- 下载:05.mp4
困难序列
-
06_Dark1_with_board
- 环境:清水,低光照条件
- 下载:06.mp4
-
07_Dark2_with_board
- 环境:清水,低光照条件
- 下载:07.mp4
-
08_HDR
- 环境:高动态范围光照条件,具有挑战性的曝光变化
- 下载:08.mp4
-
09_Blur
- 环境:水体浑浊影响图像清晰度和特征检测
- 下载:09.mp4
时间表面(TS)图像
- 事件相机在复杂水下场景的视觉表示中具有独特优势
- 提供不同数据序列生成的TS视频:
- 清水(简单序列02):02TS.mp4
- 低光照条件(困难序列06):06TS.mp4
- HDR场景(困难序列08):08TS.mp4
- 模糊水体(困难序列09):09TS.mp4
校准
- 使用Kalibr获取内在和外在参数
联系方式
- Yifan Peng: effunwayj@njust.edu.cn
- Yuze Hong: 224045004@link.cuhk.edu.cn
- Prof. Ziyang Hong: hongziyang@cuhk.edu.cn
- Prof. Junfeng Wu: junfengwu@cuhk.edu.cn
相关出版物
- AquaticVision: Benchmarking Visual SLAM in Underwater Environment with Events and Frames.
其他资源
- 实验室:香港中文大学(深圳)数据科学学院智能自主系统实验室(LIAS)
搜集汇总
数据集介绍
构建方式
AquaticVision数据集的构建采用了多传感器融合的策略,通过集成DAVIS346 Stereo Kit设备同步采集事件流、灰度图像及IMU数据。实验场景模拟真实水下环境,包含不同光照和水质条件的数据序列。运动捕捉系统CHINGMU-U4提供了120Hz的高精度地面真实轨迹,确保了数据集的可靠性。传感器间的时间戳通过硬件同步,数据格式采用rosbag和CSV等标准化形式,便于后续算法验证与比较。
特点
该数据集首次同时包含事件相机数据、传统相机帧和IMU测量,填补了水下视觉SLAM研究的数据空白。九组数据序列分为‘简单’和‘困难’两类,涵盖清晰水域、低光照、高动态范围和浑浊水质等典型水下挑战场景。事件数据具有1000Hz的高时间分辨率,与传统20-30Hz图像形成互补,为研究水下环境中的动态视觉感知提供了独特视角。地面真实轨迹通过非水下安装的运动捕捉系统获取,避免了水下标记物对机器人运动范围的限制。
使用方法
研究者可通过下载rosbag文件获取原始传感器数据,利用配套的YAML校准文件进行传感器标定。数据集支持多种评估方式:使用CSV或TUM格式的地面真实轨迹与算法输出进行ATE误差分析;通过提取的30Hz立体图像进行传统视觉SLAM测试;结合事件数据开发新型混合SLAM算法。针对不同水下条件,建议采用自适应的事件表示方法(如Time Surface或Voxel Grid)以提升特征提取鲁棒性。数据集网页提供了完整的文档和基线SLAM算法的性能基准。
背景与挑战
背景概述
AquaticVision数据集由香港中文大学(深圳)的彭一凡、洪宇泽、洪子阳等研究人员于2025年发布,旨在推动水下视觉SLAM技术的发展。该数据集首次同步整合了事件相机数据、传统相机帧和IMU测量数据,并提供了基于运动捕捉系统的真实轨迹数据,填补了水下环境中高精度SLAM算法验证的空白。其核心研究问题聚焦于解决水下复杂环境(如低光照、高动态范围和浑浊水质)对视觉定位的干扰,为海洋机器人巡检、海底三维重建等应用提供了关键基准工具。数据集通过模拟真实海底场景的泳池实验环境,设置了9组不同难度的数据序列,显著提升了水下SLAM算法在传感器融合和极端条件下的评估可靠性。
当前挑战
AquaticVision数据集面临双重挑战:在领域问题层面,水下视觉SLAM需克服低光照、悬浮颗粒散射和动态纹理缺失等难题,传统帧式相机在浑浊水域中特征提取稳定性不足,而事件相机对折射校准误差敏感;在构建过程中,多传感器时空同步精度要求极高,水-玻璃-空气界面的光学折射导致相机标定失真,且运动捕捉系统需解决水面浮动引起的位姿参考系漂移问题。此外,事件数据在强浑浊场景中出现信号衰减,需开发新型事件表征方法以提升算法鲁棒性。
常用场景
经典使用场景
AquaticVision数据集作为水下环境中视觉SLAM研究的基准工具,其经典使用场景主要体现在对多模态传感器数据的融合分析。该数据集通过同步采集事件相机数据、传统相机帧和IMU测量值,为研究水下复杂环境中的定位与建图算法提供了标准化测试平台。在模拟真实水下条件的实验池中,研究人员能够利用其提供的九种不同难度序列(包括清晰水域、低光照、高动态范围和浑浊水质场景),系统评估SLAM算法在光线衰减、悬浮颗粒干扰等挑战下的鲁棒性。
衍生相关工作
基于AquaticVision数据集衍生的研究呈现出多方向拓展趋势。在传感器融合领域,香港科技大学团队开发了EVI-SLAM系统,创造性结合事件流与视觉惯性数据;MIT提出的Hydra框架利用该数据集验证了事件相机在湍流环境中的运动去模糊算法。数据集推动的跨学科合作还催生了新型水下校准方法,如苏黎世联邦理工开发的RefracCalib工具,专门解决水-玻璃-空气界面的折射校准难题。这些工作共同构成了水下感知技术发展的里程碑。
数据集最近研究
最新研究方向
随着水下机器人技术的快速发展,AquaticVision数据集为水下视觉SLAM研究提供了全新的基准平台。该数据集融合了事件相机、传统帧相机和IMU数据,并首次引入运动捕捉系统获取的高精度轨迹真值,为算法性能评估提供了可靠依据。当前研究热点集中在事件相机与传统视觉的融合方法探索,以应对水下环境特有的低光照、高动态范围和浑浊水质等挑战。在海洋资源勘探、海底设施巡检等应用场景推动下,如何利用事件相机的高动态特性和低延迟优势提升SLAM系统的鲁棒性成为前沿方向。该数据集的发布填补了水下多模态SLAM评估体系的空白,为开发适应复杂水下环境的下一代自主导航系统奠定了重要基础。
相关研究论文
- 1AquaticVision: Benchmarking Visual SLAM in Underwater Environment with Events and Frames香港中文大学(深圳)数据科学学院 · 2025年
以上内容由遇见数据集搜集并总结生成


