LIBERO
收藏arXiv2023-10-14 更新2024-06-21 收录
下载链接:
https://libero-project.github.io
下载链接
链接失效反馈官方服务:
资源简介:
LIBERO是一个专为机器人操作设计的终身学习基准数据集,由德克萨斯大学奥斯汀分校的研究团队创建。数据集包含130个任务,旨在通过模拟人类活动,测试机器人在不同任务间的知识和技能转移能力。数据集通过一个可扩展的程序生成管道创建,支持高效学习,并提供了高质量的人类远程操作演示数据。LIBERO的应用领域主要集中在机器人学习和决策制定,特别是在需要程序性和声明性知识转移的场景中。
LIBERO is a lifelong learning benchmark dataset dedicated to robotic manipulation, developed by a research team at The University of Texas at Austin. The dataset encompasses 130 tasks, which are designed to test robots' capability of transferring knowledge and skills across diverse tasks by simulating human activities. Built upon a scalable programmatic generation pipeline, it supports efficient learning and provides high-quality human teleoperation demonstration data. The primary application domains of LIBERO lie in robotic learning and decision-making, especially in scenarios that demand procedural and declarative knowledge transfer.
提供机构:
德克萨斯大学奥斯汀分校
创建时间:
2023-06-06
搜集汇总
数据集介绍
构建方式
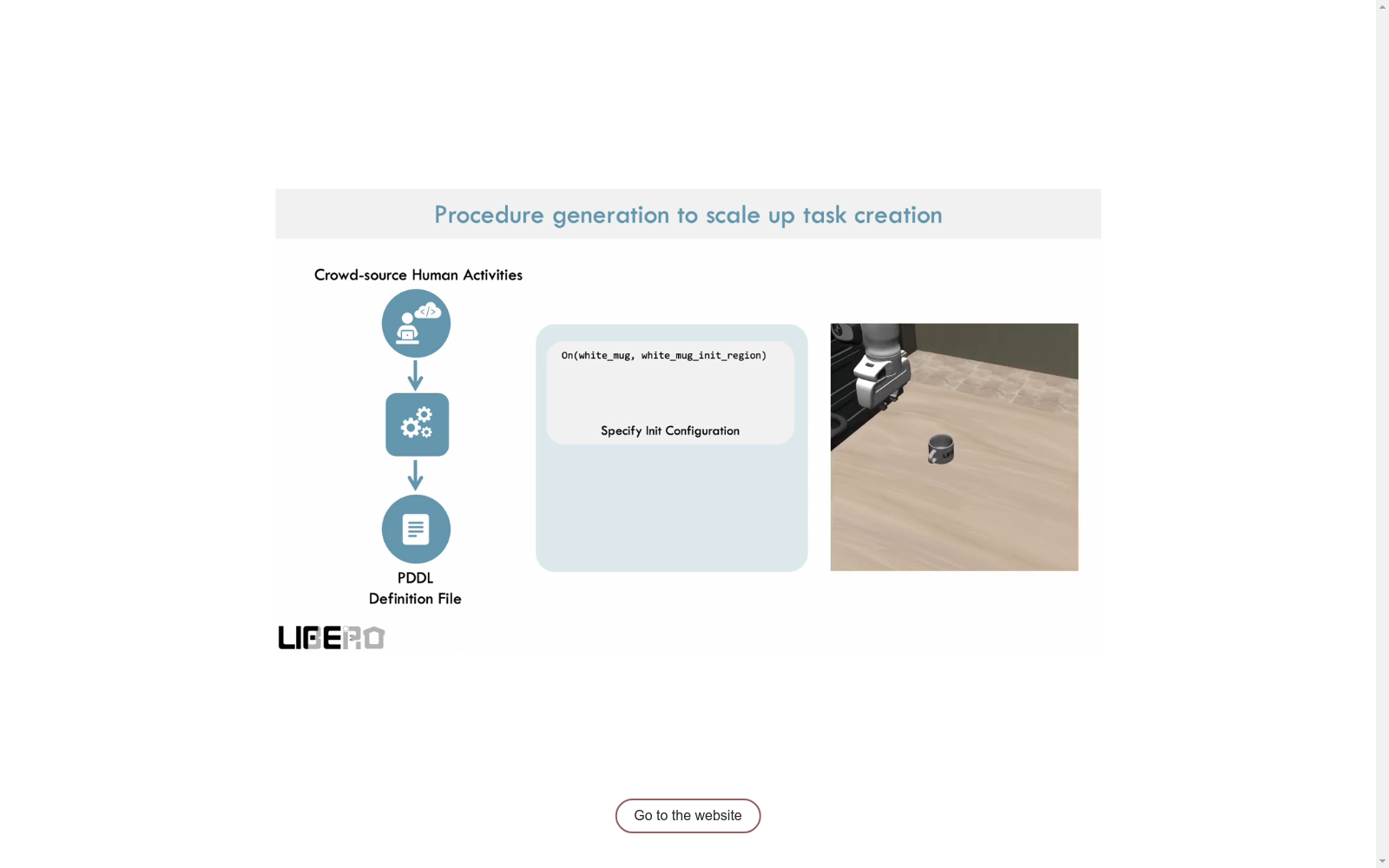
LIBERO 数据集通过一个可扩展的程序生成管道构建,该管道能够原则上生成无限多的任务。为了基准测试的目的,我们创建了四个任务套件(总共 130 个任务),用于研究上述提到的五个关键研究主题。为了支持高效的学习,我们为所有任务提供了高质量的由人类远程操作演示的数据。
特点
LIBERO 数据集具有以下特点:1)可扩展性:程序生成管道可以生成无限多的任务,满足研究需求。2)多样性:任务套件涵盖了空间关系、物体概念和任务目标的转移,以及混合类型的知识转移。3)高质量数据:提供由人类远程操作演示的数据,支持样本高效的学习。
使用方法
使用 LIBERO 数据集进行研究的步骤如下:1)选择合适的终身学习算法:根据研究目的选择合适的终身学习算法,例如经验回放、弹性权重整合或 PACKNET。2)选择合适的神经网络架构:根据任务特点选择合适的神经网络架构,例如 RESNET-RNN、RESNET-T 或 VIT-T。3)训练和评估:使用提供的数据和算法对模型进行训练和评估,分析模型在终身学习过程中的性能。
背景与挑战
背景概述
终身学习作为一种构建通用智能体的范式,旨在使智能体在其生命周期中不断学习和适应。与图像和文本领域的传统终身学习问题不同,决策中的终身学习 (LLDM) 还需要转移程序性知识,例如动作和行为。为了推动 LLDM 领域的研究,Bo Liu 等人于 2023 年 10 月 14 日在 arXiv 上发表了论文“LIBERO: Benchmarking Knowledge Transfer for Lifelong Robot Learning”,介绍了 LIBERO,这是一个用于机器人操作的终身学习基准。LIBERO 突出了 LLDM 中的五个关键研究主题:1) 如何有效地转移声明性知识、程序性知识或两者的混合;2) 如何设计有效的策略架构和 LLDM 算法;3) 终身学习者在任务排序方面的鲁棒性;4) 模型预训练对 LLDM 的影响。为了进行基准测试,他们创建了四个任务套件(总共 130 个任务),用于研究上述研究主题。为了支持样本高效的学习,他们为所有任务提供了高质量的由人类远程操作演示数据。他们的广泛实验呈现了几个有洞察力甚至意外的发现:顺序微调在正向迁移方面优于现有的终身学习方法,没有单一的视觉编码器架构在所有类型的知识转移中都表现出色,简单的监督预训练可能会阻碍代理在后续任务中的性能。
当前挑战
LIBERO 数据集面临的挑战主要包括:1) 如何有效地转移声明性知识和程序性知识;2) 如何设计有效的策略架构和终身学习算法;3) 如何提高终身学习者在任务排序方面的鲁棒性;4) 如何利用预训练模型来提高终身学习性能。
常用场景
经典使用场景
LIBERO 数据集旨在为终身决策学习 (LLDM) 提供一个基准,该基准涉及机器人操作任务。LLDM 是终身学习的子领域,旨在开发能够在其生命周期内学习和适应的通用智能体。与图像和文本领域的传统终身学习问题不同,LLDM 不仅涉及实体和概念的陈述性知识转移,还涉及程序性知识(如动作和行为)的转移。LIBERO 数据集通过其程序生成流程,理论上可以生成无限数量的任务,为研究人员提供了一个可扩展的平台来研究 LLDM 的各个方面。
实际应用
LIBERO 数据集的实际应用场景包括机器人操作、自动驾驶汽车和智能代理等。例如,LIBERO 数据集可以帮助开发能够在各种环境中执行复杂任务的机器人,例如在厨房中准备食物或在仓库中搬运物品。此外,LIBERO 数据集还可以用于训练自动驾驶汽车,使其能够在不同的交通环境中安全地导航。最后,LIBERO 数据集还可以用于训练智能代理,使其能够与人类进行自然和流畅的交互。
衍生相关工作
LIBERO 数据集衍生了许多相关的经典工作,包括 ContinualWorld、CORA 和 OpenLORIS 等。这些基准旨在解决终身学习的不同方面,例如机器人操作、强化学习和对象学习。LIBERO 数据集的独特之处在于它专注于 LLDM,并为研究人员提供了一个可扩展的平台来研究 LLDM 的各个方面。此外,LIBERO 数据集还提供了高质量的演示数据,支持高效的学习,并允许研究人员系统地研究 LLDM 的各个方面。
以上内容由遇见数据集搜集并总结生成


