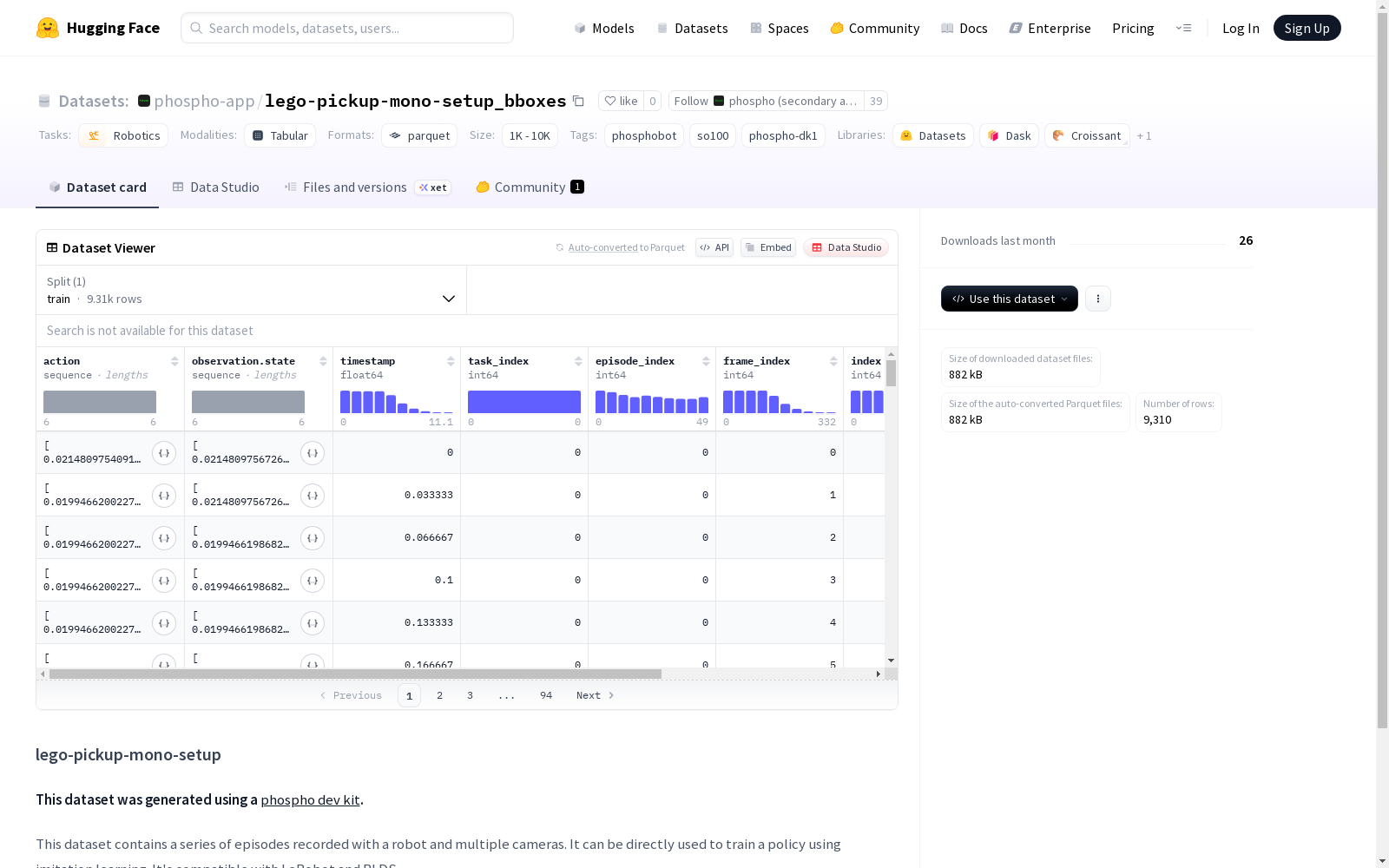
lego-pickup-mono-setup_bboxes
收藏Hugging Face2025-06-04 更新2025-06-05 收录
下载链接:
https://huggingface.co/datasets/phospho-app/lego-pickup-mono-setup_bboxes
下载链接
链接失效反馈官方服务:
资源简介:
这是一个使用phospho dev kit生成的机器人抓取乐高积木的数据集,包含多个相机视角记录的机器人操作剧集,可用于模仿学习训练机器人策略,兼容LeRobot和RLDS。
创建时间:
2025-06-03
搜集汇总
数据集介绍
构建方式
在机器人视觉感知领域,lego-pickup-mono-setup_bboxes数据集通过phospho开发套件系统采集多视角机器人操作序列。数据记录过程采用多相机同步捕捉机械臂与乐高积木交互的高频图像流,每一帧均配有精确的边界框标注,确保了时空一致性。
使用方法
研究者可直接加载数据集至兼容框架,通过解析时间对齐的图像序列与边界框标签训练端到端策略。数据遵循标准RLDS格式,支持高效流式读取与批量处理,适用于行为克隆、视觉伺服控制等机器人学习任务。
背景与挑战
背景概述
在机器人模仿学习领域,高质量数据集是推动算法发展的关键基础设施。lego-pickup-mono-setup_bboxes数据集由phospho机构基于其开发的机器人开发套件构建,专注于单目视觉条件下的物体抓取任务。该数据集通过多相机系统记录机器人操作乐高积木的连续动作序列,其设计初衷是为模仿学习策略提供可直接训练的多模态数据支持,并与LeRobot及RLDS等主流机器人学习框架保持兼容,体现了机器人操作技能数据标准化的重要趋势。
当前挑战
该数据集核心挑战在于解决单目视觉机器人抓取中的空间感知不确定性,以及动态环境下物体位姿的精确估计问题。构建过程中需克服多相机时序同步、动作轨迹标注一致性、以及真实世界物理交互噪声消除等技术难点。此外,如何保证演示数据的质量足以支撑策略泛化,并平衡操作场景的复杂性与数据采集效率,亦是数据集构建者面临的关键挑战。
常用场景
经典使用场景
在机器人操作任务研究中,lego-pickup-mono-setup_bboxes数据集通过记录多摄像头下的机械臂抓取乐高积木的连续动作序列,为模仿学习算法提供了高质量的示范数据。研究者可基于该数据集训练端到端的决策模型,使机器人能够从视觉输入中直接推断出抓取策略,显著提升了在结构化环境中物体操控的泛化能力。
解决学术问题
该数据集有效解决了机器人模仿学习中多模态感知与动作生成的耦合问题,通过提供时空对齐的视觉-动作序列,支持学术界研究基于视觉的强化学习、行为克隆及序列预测模型。其意义在于降低了真实机器人实验的成本,为动态环境下的抓取任务提供了可复现的基准,推动了机器人自主操作能力的发展。
实际应用
在实际工业与物流场景中,该数据集能够指导开发自动化分拣系统,适用于小型物品的抓取、摆放与包装任务。其多摄像头设置模拟了真实工作环境中的视觉感知需求,为部署视觉导引的机械臂系统提供了训练数据基础,尤其在电子装配、玩具制造等领域具有直接应用价值。
数据集最近研究
最新研究方向
在机器人视觉与操作领域,lego-pickup-mono-setup_bboxes数据集正推动模仿学习与多模态感知的深度融合。研究者聚焦于单目视觉下的物体抓取任务,结合边界框标注数据,探索端到端策略网络的优化与泛化能力。热点方向包括跨域迁移学习在真实环境中的应用,以及基于Transformer架构的时序动作预测模型。这些进展显著提升了机器人在复杂场景中的自主操作精度,为工业自动化和服务机器人提供了关键技术支持。
以上内容由遇见数据集搜集并总结生成


