Robotic-Failure-Detection-Datasets-Benchmark
收藏github2026-02-09 更新2026-02-11 收录
下载链接:
https://github.com/paulpacaud/Robotic-Failure-Detection-Datasets-Benchmark
下载链接
链接失效反馈官方服务:
资源简介:
机器人故障检测数据集的精选列表。这些数据集可以作为故障检测模型或奖励模型的训练数据,也可以作为基准,以系统和可重复的方式评估故障检测方法。
A curated list of robot fault detection datasets. These datasets can serve as training data for fault detection models or reward models, and also act as benchmarks to evaluate fault detection methods in a systematic and reproducible manner.
创建时间:
2026-02-09
原始信息汇总
机器人故障检测数据集与基准
概述
这是一个关于机器人故障检测数据集的精选列表。这些数据集可作为故障检测模型或奖励模型的训练数据,也可作为系统化、可复现地评估这些模型的基准。
数据集详情
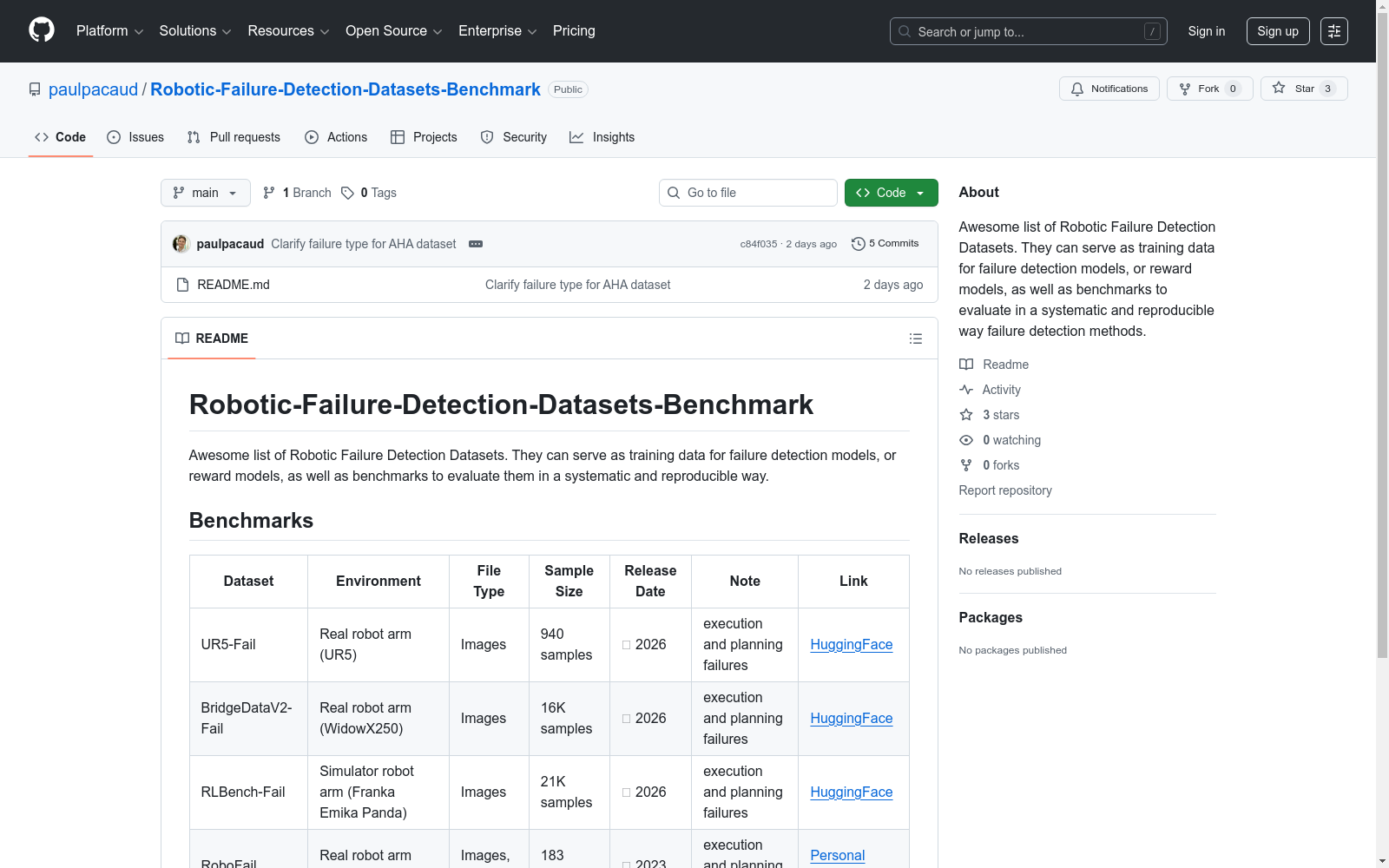
| 数据集名称 | 环境 | 文件类型 | 样本数量 | 发布日期 | 备注 | 链接 |
|---|---|---|---|---|---|---|
| UR5-Fail | 真实机器人手臂 (UR5) | 图像 | 940 个样本 | 2026年 | 执行与规划故障 | https://huggingface.co/collections/paulpacaud/ur5-fail-robot-failure-detection-benchmark |
| BridgeDataV2-Fail | 真实机器人手臂 (WidowX250) | 图像 | 16K 个样本 | 2026年 | 执行与规划故障 | https://huggingface.co/collections/paulpacaud/bridgedatav2-fail-robot-failure-detection-benchmark |
| RLBench-Fail | 模拟器机器人手臂 (Franka Emika Panda) | 图像 | 21K 个样本 | 2026年 | 执行与规划故障 | https://huggingface.co/collections/paulpacaud/rlbench-fail-robot-failure-detection-benchmark |
| RoboFail | 真实机器人手臂 (UR5) | 图像,视频 | 183 个样本 | 2023年 | 执行与规划故障 | https://www.cs.columbia.edu/~liuzeyi/reflect_data/ |
| AHA | 模拟器机器人手臂 (Franka Emika Panda) | 图像 | 21K 个样本 | 未发布 | 执行故障 | 无 |
搜集汇总
数据集介绍
构建方式
在机器人故障检测领域,数据集的构建通常依赖于真实机器人平台与仿真环境的结合。该基准整合了多个子数据集,如UR5-Fail和BridgeDataV2-Fail,它们通过真实UR5和WidowX250机械臂在执行任务过程中采集图像数据,捕捉执行与规划失败场景;同时,RLBench-Fail等数据集利用Franka Emika Panda仿真机器人,在受控环境中生成大量故障样本。数据收集过程涵盖了从简单操作失误到复杂规划错误的多种故障类型,确保了样本的多样性与代表性。
特点
该数据集的特点在于其综合性与系统性,它汇集了来自真实机器人实验和仿真环境的多源数据,覆盖了UR5、WidowX250和Franka Emika Panda等多种机器人平台。数据以图像和视频形式呈现,样本规模从数百到数万不等,提供了丰富的视觉信息用于故障分析。此外,数据集明确标注了执行失败与规划失败类别,便于模型区分不同故障模式,其发布在HuggingFace等平台,确保了可访问性与可重复性,为机器人安全与可靠性研究奠定了坚实基础。
使用方法
使用该数据集时,研究人员可将其作为训练数据来开发故障检测模型,或作为奖励模型以优化机器人控制策略。数据集也可用作基准测试工具,通过系统化评估来比较不同算法的性能。具体操作中,用户可从提供的链接下载子数据集,如UR5-Fail或RLBench-Fail,利用图像数据进行预处理和特征提取,进而训练深度学习模型进行故障分类或预测。为确保实验的可重复性,建议遵循数据集附带的文档说明,并在仿真与真实场景中进行交叉验证。
背景与挑战
背景概述
随着机器人技术在工业自动化与家庭服务等领域的广泛应用,机器人系统的可靠性与安全性成为关键研究议题。Robotic-Failure-Detection-Datasets-Benchmark由研究人员Paul Pacaud等人于2023年至2026年间陆续构建,旨在为机器人故障检测提供标准化数据集与评估基准。该数据集整合了来自真实机器人平台(如UR5、WidowX250)与仿真环境(如RLBench)的多模态数据,聚焦于执行与规划过程中的故障识别问题,为开发鲁棒的故障检测模型奠定了数据基础,推动了机器人自主性与容错能力的研究进展。
当前挑战
在机器人故障检测领域,核心挑战在于如何从复杂动态环境中准确识别多样化的故障模式,包括机械执行偏差与任务规划逻辑错误。数据集构建过程中面临诸多困难:真实机器人实验需克服硬件操作风险与数据采集成本高昂的问题,仿真环境则需确保物理模型与现实世界的一致性;同时,故障样本的标注依赖专家知识,标注过程耗时且易引入主观偏差。此外,多源数据的异构性(如图像、视频)与规模差异对模型泛化能力提出了更高要求,需设计统一的评估框架以保障研究的可复现性与系统性。
常用场景
经典使用场景
在机器人控制与自主系统领域,Robotic-Failure-Detection-Datasets-Benchmark为故障检测模型的训练与评估提供了标准化数据基础。该数据集通过整合真实机器人臂(如UR5、WidowX250)与仿真环境(如RLBench)中的图像样本,涵盖了执行与规划失败场景,使得研究人员能够系统性地构建和验证故障识别算法,从而提升机器人在复杂任务中的鲁棒性与可靠性。
解决学术问题
该数据集有效解决了机器人学中故障检测模型缺乏统一评估基准的学术难题。通过提供多环境、多模态的失败案例数据,它支持了对模型泛化能力、实时检测精度及跨场景适应性的量化分析,推动了故障预测与容错控制理论的发展,并为可复现研究奠定了数据基础。
衍生相关工作
基于该数据集衍生的经典工作包括结合深度学习的异常检测框架、强化学习中的安全约束策略以及多模态故障分类模型。例如,利用UR5-Fail和BridgeDataV2-Fail数据,研究者开发了基于视觉Transformer的实时故障诊断系统,并在仿真到真实的迁移学习中取得了显著进展。
以上内容由遇见数据集搜集并总结生成


