UAV-DarkBlur
收藏github2026-01-12 更新2026-01-13 收录
下载链接:
https://github.com/tukumax/UAV-DarkBlur
下载链接
链接失效反馈官方服务:
资源简介:
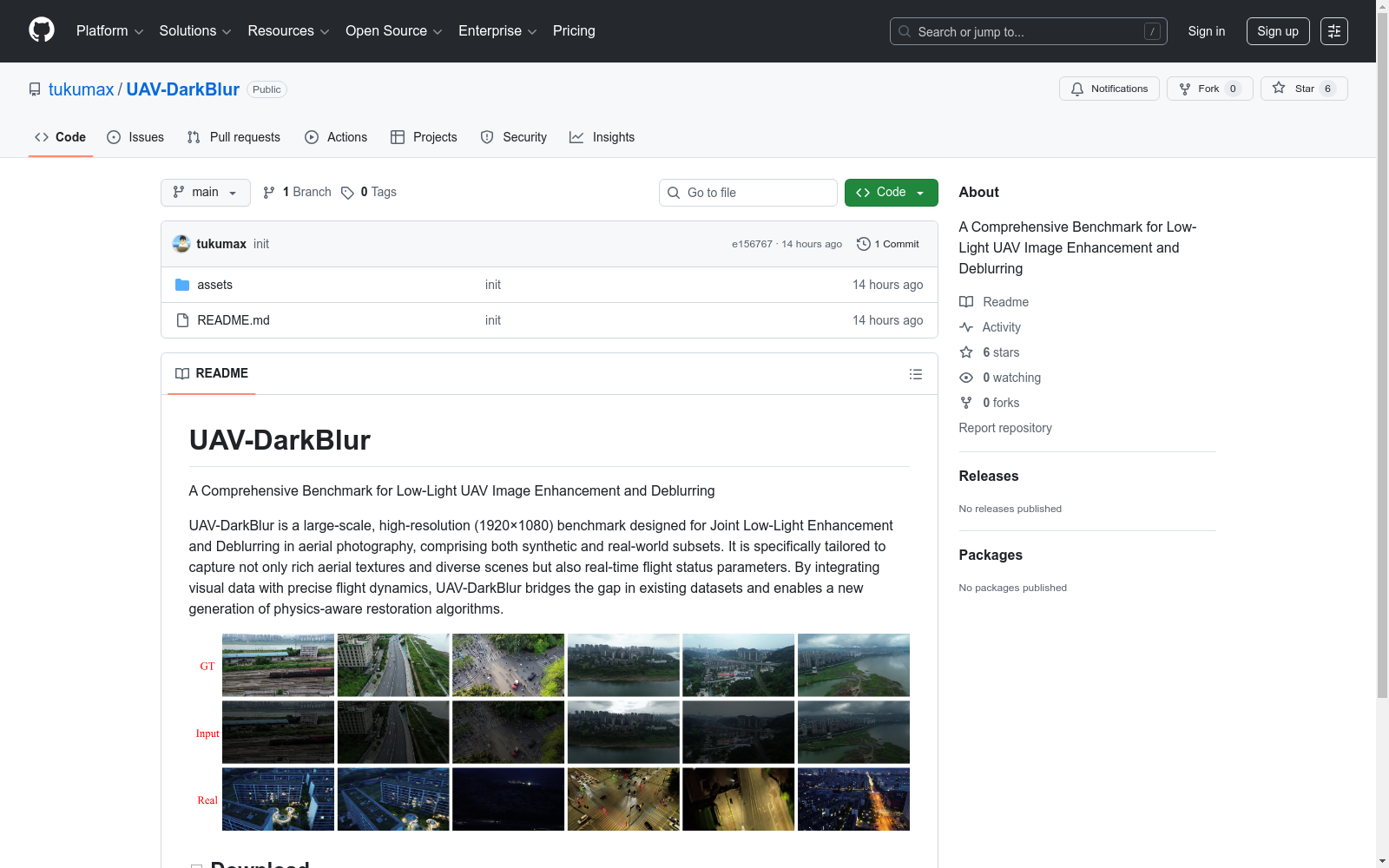
UAV-DarkBlur是一个大规模、高分辨率(1920×1080)的基准数据集,专为航空摄影中的联合低光增强和去模糊而设计,包含合成和真实世界的子集。它特别设计用于捕捉丰富的航空纹理和多样化的场景,以及实时飞行状态参数。通过将视觉数据与精确的飞行动力学相结合,UAV-DarkBlur填补了现有数据集的空白,并支持新一代的物理感知恢复算法。
UAV-DarkBlur is a large-scale, high-resolution (1920×1080) benchmark dataset designed specifically for joint low-light enhancement and deblurring tasks in aerial photography, comprising both synthetic and real-world subsets. It is specially tailored to capture rich aerial textures, diverse scenarios, and real-time flight state parameters. By combining visual data with precise flight dynamics information, UAV-DarkBlur fills the gaps in existing datasets and supports a new generation of physics-aware restoration algorithms.
创建时间:
2026-01-12
原始信息汇总
UAV-DarkBlur 数据集概述
数据集名称
UAV-DarkBlur
核心用途
专为航空摄影中的联合低光增强与去模糊任务设计。
主要特点
- 规模与分辨率:大规模、高分辨率(1920×1080)基准数据集。
- 数据构成:包含合成子集和真实世界子集。
- 内容特色:
- 捕捉丰富的航空纹理和多样化场景。
- 包含实时飞行状态参数。
- 数据融合:将视觉数据与精确的飞行动力学数据相结合。
- 设计目标:
- 弥补现有数据集的不足。
- 支持新一代具有物理感知能力的图像复原算法。
数据状态
- 下载链接:尚未发布。
- 更新通知:建议关注项目仓库(https://github.com/tukumax/UAV-DarkBlur)以获取最新信息。
搜集汇总
数据集介绍
构建方式
在无人机视觉领域,低光照与运动模糊是影响航拍图像质量的关键挑战。UAV-DarkBlur数据集通过精心设计的采集流程构建而成,其包含合成与真实世界两个子集,均以1920×1080的高分辨率呈现。合成数据基于物理模型模拟了无人机在复杂光照与动态飞行条件下的成像退化,而真实数据则通过实际飞行任务捕获,同步记录了丰富的场景纹理与实时的飞行状态参数,如姿态、速度等,确保了数据在视觉与物理层面的一致性。
特点
该数据集的核心特点在于其全面性与多模态融合。它不仅提供了大规模的高清航拍图像,覆盖了多样的地形与光照场景,还创新性地将视觉数据与精确的飞行动力学参数相结合。这种设计使得数据集能够捕捉到空中拍摄特有的运动模糊与光照变化模式,为开发物理感知的图像恢复算法奠定了坚实基础。同时,合成与真实数据的并存,为方法验证提供了从模拟到实际的无缝过渡。
使用方法
研究人员可利用UAV-DarkBlur进行低光照增强与去模糊的联合任务研究。数据集支持端到端的模型训练,用户可基于合成数据预训练算法,再通过真实数据微调以提升泛化能力。飞行参数可作为先验信息输入,引导模型学习退化过程与物理约束之间的关系。评估时,建议分别在两个子集上测试,以全面衡量算法在模拟环境与实际应用中的性能表现。
背景与挑战
背景概述
随着无人机技术的飞速发展,低空摄影在环境监测、灾害评估及城市规划等领域的应用日益广泛。然而,无人机在复杂光照条件下捕获的图像常受低照度与运动模糊的双重干扰,严重制约了后续视觉任务的精度。为此,研究团队于近期构建了UAV-DarkBlur数据集,该数据集融合了合成与真实世界子集,不仅涵盖丰富的高分辨率航拍纹理与多样化场景,还同步记录了实时飞行状态参数,为开发物理感知的图像复原算法奠定了关键基础。
当前挑战
在低光照无人机图像增强与去模糊领域,核心挑战在于如何有效分离并补偿光照衰减与运动退化之间的耦合干扰,同时保持图像的自然纹理与结构真实性。构建UAV-DarkBlur数据集时,研究人员需精确模拟真实飞行中的动态模糊与光照变化,并确保合成数据与真实数据在退化模式上的一致性;此外,大规模高分辨率数据的采集与标注,以及多模态信息(如飞行参数)的同步对齐,也构成了显著的技术壁垒。
常用场景
经典使用场景
在无人机航拍领域,低光照与动态模糊是图像质量退化的主要挑战。UAV-DarkBlur数据集通过提供大规模高分辨率图像,并同步记录飞行状态参数,为联合低光增强与去模糊任务奠定了基准。其经典使用场景在于模拟真实航拍环境中的复杂退化条件,使研究者能够开发并验证算法在恢复图像细节、提升视觉清晰度方面的性能,尤其适用于城市监测、地形勘察等需高质量视觉数据的场景。
实际应用
在实际应用中,UAV-DarkBlur数据集支持无人机在夜间巡检、紧急救援、农业监测等低能见度环境下的作业。通过基于该数据集训练的增强模型,无人机能够实时生成清晰、细节丰富的航拍图像,辅助决策系统进行目标识别、路径规划与环境分析。这不仅提升了无人机在复杂气象与光照条件下的操作可靠性,也为智慧城市、公共安全等领域的自动化视觉任务提供了技术保障。
衍生相关工作
围绕UAV-DarkBlur数据集,已衍生出多项经典研究工作,主要集中在物理引导的深度学习框架与多任务联合优化算法。例如,研究者利用其飞行参数开发了运动模糊建模方法,实现了更精准的图像复原;同时,基于该数据集的对抗生成网络与注意力机制结合,推动了低光图像增强的实时处理能力。这些工作不仅拓展了无人机视觉的学术边界,也为工业级航拍系统的性能优化提供了参考范例。
以上内容由遇见数据集搜集并总结生成


