3DVis dataset
收藏github2021-08-14 更新2024-05-31 收录
下载链接:
https://github.com/pcirujeda/3DVis-dataset
下载链接
链接失效反馈官方服务:
资源简介:
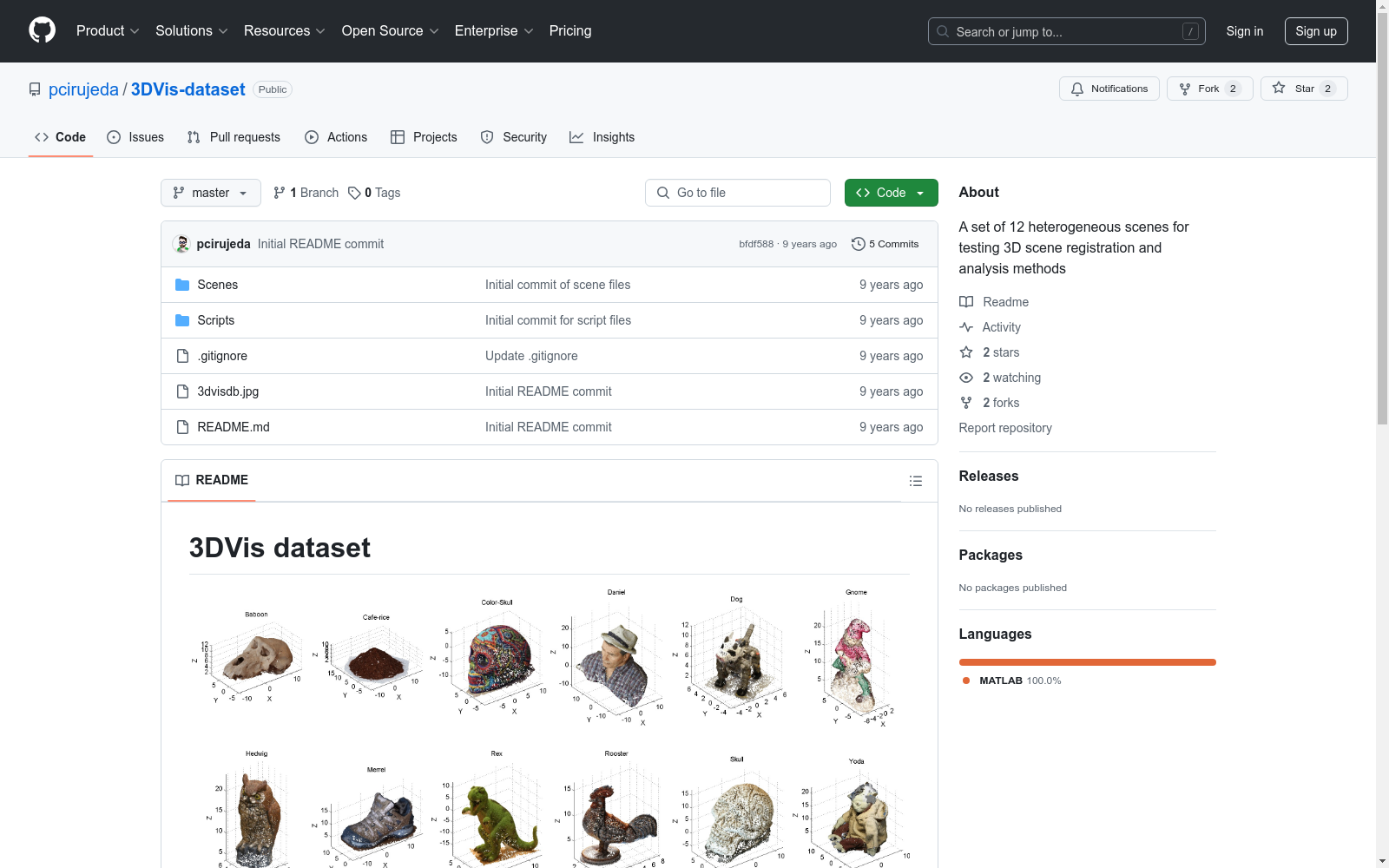
3DVis数据集包含一组12个异构场景,用于测试3D场景注册和分析方法。模型包括均匀形状、重复的光度模式和对称性。场景以带有顶点和法线信息的Wavefront .obj格式存储的点云形式存在。
The 3DVis dataset comprises a collection of 12 heterogeneous scenes designed to test 3D scene registration and analysis methods. The models include uniform shapes, repetitive photometric patterns, and symmetries. The scenes are represented as point clouds stored in the Wavefront .obj format, complete with vertex and normal information.
创建时间:
2016-10-16
原始信息汇总
3DVis数据集概述
数据集描述
- 场景类型:包含12个异构场景,用于测试3D场景注册和分析方法。
- 模型特征:包括均匀形状、重复的光度学模式和对称性。
- 文件格式:场景以Wavefront .obj格式存储,包含点云及其法线信息。
- 数据处理工具:提供Matlab脚本用于数据处理。
许可证
- 主要许可证:MPL2(Mozilla公共许可证2.0版)。
- 第三方代码:部分文件可能包含其他许可证下的第三方代码。
引用信息
若在学术项目中使用此数据集,请适当引用以下文献:
bibtex @article{cirujeda20153d, title={A 3d scene registration method via covariance descriptors and an evolutionary stable strategy game theory solver}, author={Cirujeda, Pol and Cid, Yashin Dicente and Mateo, Xavier and Binefa, Xavier}, journal={International Journal of Computer Vision}, volume={115}, number={3}, pages={306--329}, year={2015}, publisher={Springer} }
@inproceedings{cirujeda2014mcov, title={MCOV: a covariance descriptor for fusion of texture and shape features in 3D point clouds}, author={Cirujeda, Pol and Mateo, Xavier and Dicente, Yashin and Binefa, Xavier}, booktitle={2014 2nd International Conference on 3D Vision}, volume={1}, pages={551--558}, year={2014}, organization={IEEE} }
搜集汇总
数据集介绍
构建方式
3DVis数据集构建于12个异质场景,旨在测试三维场景配准与分析方法的有效性。这些场景涵盖了同质形状、重复的光度模式以及对称性等多种复杂结构。数据集以Wavefront .obj格式存储,包含点云的顶点和法线信息,并配备了Matlab脚本以支持数据处理。
特点
3DVis数据集的特点在于其多样化的场景设计,涵盖了从简单到复杂的多种几何与光度特征。每个场景均以点云形式呈现,并附有详细的顶点和法线信息,为三维场景分析提供了丰富的数据基础。此外,数据集还提供了Matlab脚本,便于用户进行数据处理与分析。
使用方法
使用3DVis数据集时,用户可通过Matlab脚本加载和处理Wavefront .obj格式的场景数据。数据集适用于三维场景配准、形状分析以及光度模式识别等研究任务。在学术项目中引用该数据集时,需遵循MPL2许可协议,并引用相关论文以尊重作者的知识产权。
背景与挑战
背景概述
3DVis数据集由Pol Cirujeda等研究人员于2015年创建,旨在为三维场景配准与分析方法的测试提供多样化的场景数据。该数据集包含12个异质场景,涵盖了均匀形状、重复的光度模式以及对称性等复杂特征。数据集以Wavefront .obj格式存储,包含点云的顶点和法线信息,并提供了Matlab脚本以支持数据处理。3DVis数据集的发布推动了三维计算机视觉领域的发展,特别是在基于协方差描述符和进化稳定策略的配准方法研究中,具有重要的学术影响力。
当前挑战
3DVis数据集在解决三维场景配准问题时面临多重挑战。首先,异质场景中的复杂几何结构和光度模式增加了配准算法的难度,尤其是在处理重复模式和对称性时,算法容易陷入局部最优解。其次,数据集的构建过程中,如何确保点云数据的精度和一致性是一个关键问题,尤其是在处理大规模场景时,数据采集和标注的复杂性显著增加。此外,数据集的多样性和复杂性也对算法的鲁棒性和计算效率提出了更高的要求,如何在保证精度的同时提升计算性能,成为当前研究中的一大挑战。
常用场景
经典使用场景
3DVis数据集广泛应用于三维场景注册和分析方法的测试中。其包含的12个异质场景,涵盖了从均匀形状到重复的光度模式及对称性等多种复杂情况,为研究者提供了一个丰富的实验平台。通过使用Matlab脚本处理数据,研究者可以高效地进行三维点云数据的注册和分析,从而验证和改进算法的性能。
实际应用
在实际应用中,3DVis数据集被广泛用于机器人导航、增强现实和虚拟现实等领域。例如,在机器人导航中,精确的三维场景注册是实现自主定位和路径规划的关键步骤。通过使用3DVis数据集,开发者可以测试和优化其算法,确保机器人在复杂环境中的导航精度。此外,该数据集还在文化遗产保护和建筑建模等领域发挥了重要作用,帮助实现高精度的三维重建。
衍生相关工作
3DVis数据集衍生了许多经典的研究工作,特别是在三维点云特征描述和场景注册算法方面。例如,Cirujeda等人提出的基于协方差描述符的三维场景注册方法,通过结合纹理和形状特征,显著提高了注册精度。此外,该数据集还激发了其他研究者在进化稳定策略和博弈论求解器方面的探索,推动了三维视觉领域的多学科交叉研究。
以上内容由遇见数据集搜集并总结生成


