GSCollision
收藏Hugging Face2025-10-24 更新2025-10-25 收录
下载链接:
https://huggingface.co/datasets/lishiqianhugh/GSCollision
下载链接
链接失效反馈官方服务:
资源简介:
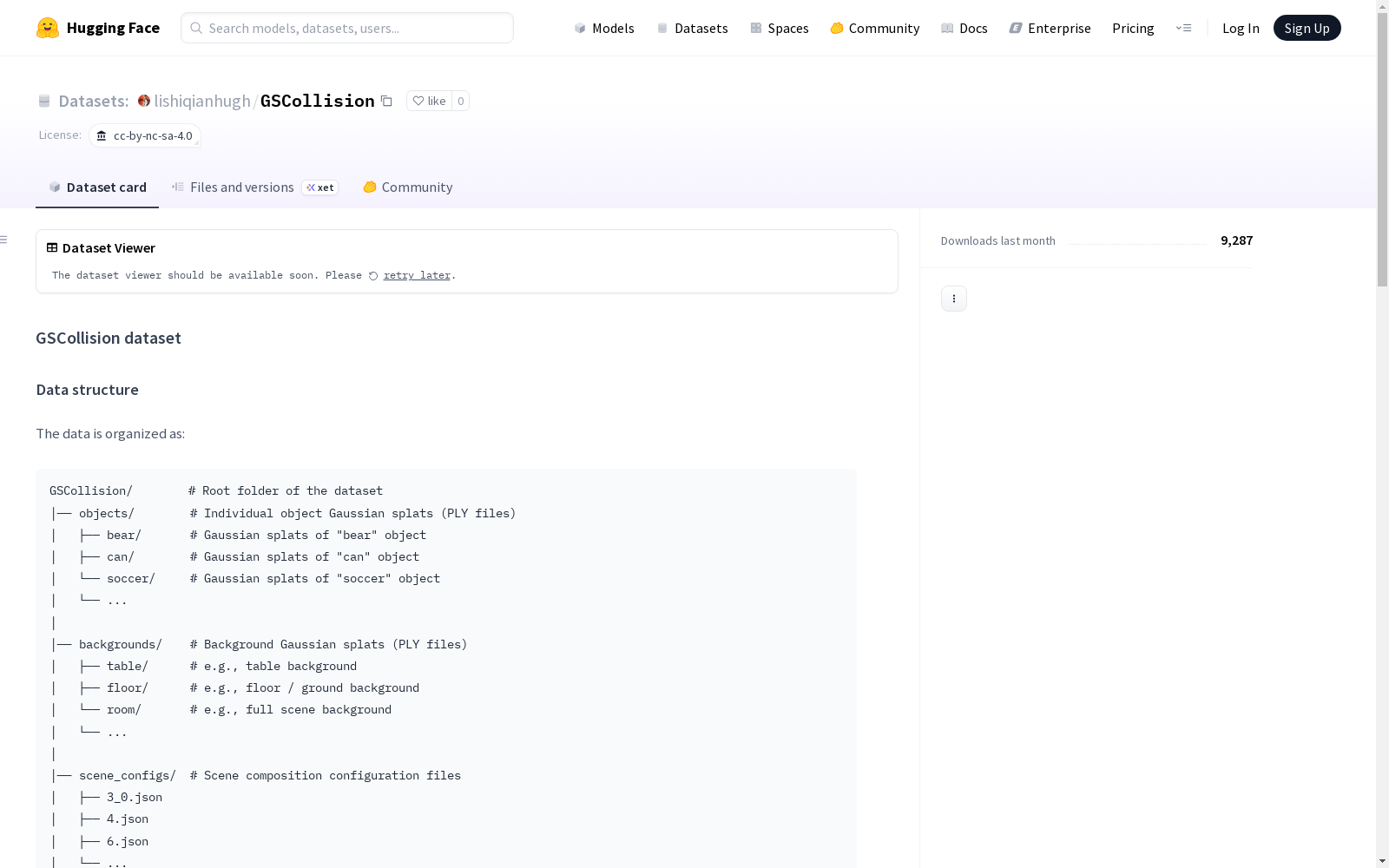
GSCollision数据集包含不同对象和背景的Gaussian splats,以及相应的场景配置、初始多视角图像和仿真结果。数据集用于研究物体碰撞等场景的模拟。
创建时间:
2025-10-17
原始信息汇总
GSCollision 数据集概述
数据集基本信息
- 许可证: CC-BY-NC-SA-4.0
- 总数据量: 6014.75 GB
数据结构组织
主要目录结构
- objects/: 单个物体的高斯点云数据(PLY文件)
- backgrounds/: 背景的高斯点云数据(PLY文件)
- scene_configs/: 场景组合配置文件
- scenes/: 组合多物体高斯点云数据(静态高斯)
- initial/: 带背景的初始场景多视角图像
- mpm/: 模拟结果数据
详细数据分布
物体数据
- objects: 226 MB
- 包含多种物体类型:bear、can、soccer等
背景数据
- backgrounds: 2.87 GB
- 包含多种背景类型:table、floor、room等
场景配置
- scene_configs: 912 KB
- 包含多种场景配置文件:3_0.json、4.json、6.json等
组合场景
- scenes: 344.42 GB
- 按场景类型组织:3_0、4、6等
- 每个场景包含多个物体组合
初始场景图像
- initial: 1324.63 GB
- 按场景类型组织:3_0、4、6等
- 包含PNG文件和MP4文件
模拟结果数据
- mpm: 总容量约4.2 TB
- mpm/3_0: 341.12 GB
- mpm/3_1: 341.07 GB
- mpm/3_2: 336.74 GB
- mpm/3_3: 339.80 GB
- mpm/3_4: 334.31 GB
- mpm/3_5: 341.33 GB
- mpm/3_6: 341.88 GB
- mpm/3_7: 338.69 GB
- mpm/3_8: 339.73 GB
- mpm/3_9: 334.14 GB
- mpm/4: 395.04 GB
- mpm/6: 558.76 GB
- 包含PNG文件和H5文件
搜集汇总
数据集介绍
构建方式
在计算机视觉与物理仿真交叉领域,GSCollision数据集采用模块化构建理念,通过分离式采集物体与背景的高斯溅射表示。数据集首先独立构建各类物体的三维高斯溅射模型,包括熊、罐子、足球等常见对象,同时采集桌面、地板、房间等多种背景环境。随后基于场景配置文件,将不同物体组合置于特定背景中,形成包含3至6个对象的复杂场景,并通过物质点法模拟物体间的碰撞动力学过程,最终生成包含静态高斯溅射、初始场景多视角图像及动态仿真结果的完整数据体系。
特点
该数据集最显著的特征在于其大规模的多模态数据组织,总容量超过6TB,涵盖从单个物体到复杂场景的多层次表示。数据集提供完整的高斯溅射表示流水线,包含物体级、场景级和仿真级三个层次的数据结构。每个场景不仅包含静态的三维高斯溅射模型,还提供多视角的初始场景图像序列和经过物理仿真后的动态演变过程。特别值得一提的是,数据集通过分离物体与背景的高斯表示,为研究物体在复杂环境中的碰撞行为提供了灵活的建模基础,同时保持了对物理真实性的高度还原。
使用方法
研究人员可依据层级化目录结构灵活调用数据集资源。从objects和backgrounds目录可获取基础的高斯溅射组件,用于构建自定义场景。scene_configs中的配置文件定义了标准场景组合,scenes目录提供预合成的静态高斯场景。initial目录包含背景融合后的多视角初始场景图像,适用于视觉感知任务。mpm目录则提供物质点法仿真结果,包含带背景的图像序列和无背景的动态高斯数据,特别适合物理推理与动态场景分析研究。这种模块化设计支持从基础组件到完整仿真流程的多种研究需求。
背景与挑战
背景概述
GSCollision数据集作为计算机视觉与物理仿真交叉领域的重要资源,由研究机构于2023年推出,专注于三维场景中物体碰撞动力学的建模。该数据集采用高斯溅射技术构建动态场景,通过整合多视角图像与物质点法仿真数据,为可微渲染与物理模拟的融合研究提供支撑。其核心研究目标在于解决复杂物理交互场景的实时重建难题,推动自动驾驶仿真、机器人操作等应用领域的算法突破。
当前挑战
在物理仿真领域,该数据集致力于攻克非刚性物体碰撞动态建模的长期难题,包括多物体交互时的能量守恒约束与形变精度平衡。构建过程中面临双重挑战:高斯溅射表示需协调几何精度与计算效率的矛盾,而超6TB的多模态数据集成则需解决异构数据同步与存储优化的工程瓶颈。
常用场景
经典使用场景
在计算机视觉与物理仿真交叉领域,GSCollision数据集为研究高斯溅射技术下的多物体碰撞动力学提供了标准基准。该数据集通过精心设计的场景配置,将不同物体在多样化背景中进行组合,构建了从简单到复杂的碰撞实验环境。研究人员能够利用这些数据训练和验证基于高斯表示的物理仿真模型,探索物体在碰撞过程中的形变、运动轨迹等物理现象。
解决学术问题
该数据集有效解决了传统网格表示在复杂碰撞仿真中难以处理拓扑变化的关键难题。通过高斯溅射表示法,研究者能够更自然地模拟物体的碎裂、融合等非线性变形过程。这一突破为计算机图形学中的实时物理仿真提供了新的技术路径,同时推动了基于神经表示的物理推理方法的发展,为可微分物理仿真奠定了数据基础。
衍生相关工作
基于GSCollision数据集,学术界涌现出多项创新研究。其中高斯溅射与物质点法的结合推动了动态场景重建技术的发展,衍生出多视角动态高斯重建等代表性工作。这些研究进一步拓展了可微分渲染在物理仿真中的应用边界,为神经物理引擎的构建提供了重要参考,持续推动着计算机视觉与计算物理的深度融合。
以上内容由遇见数据集搜集并总结生成


