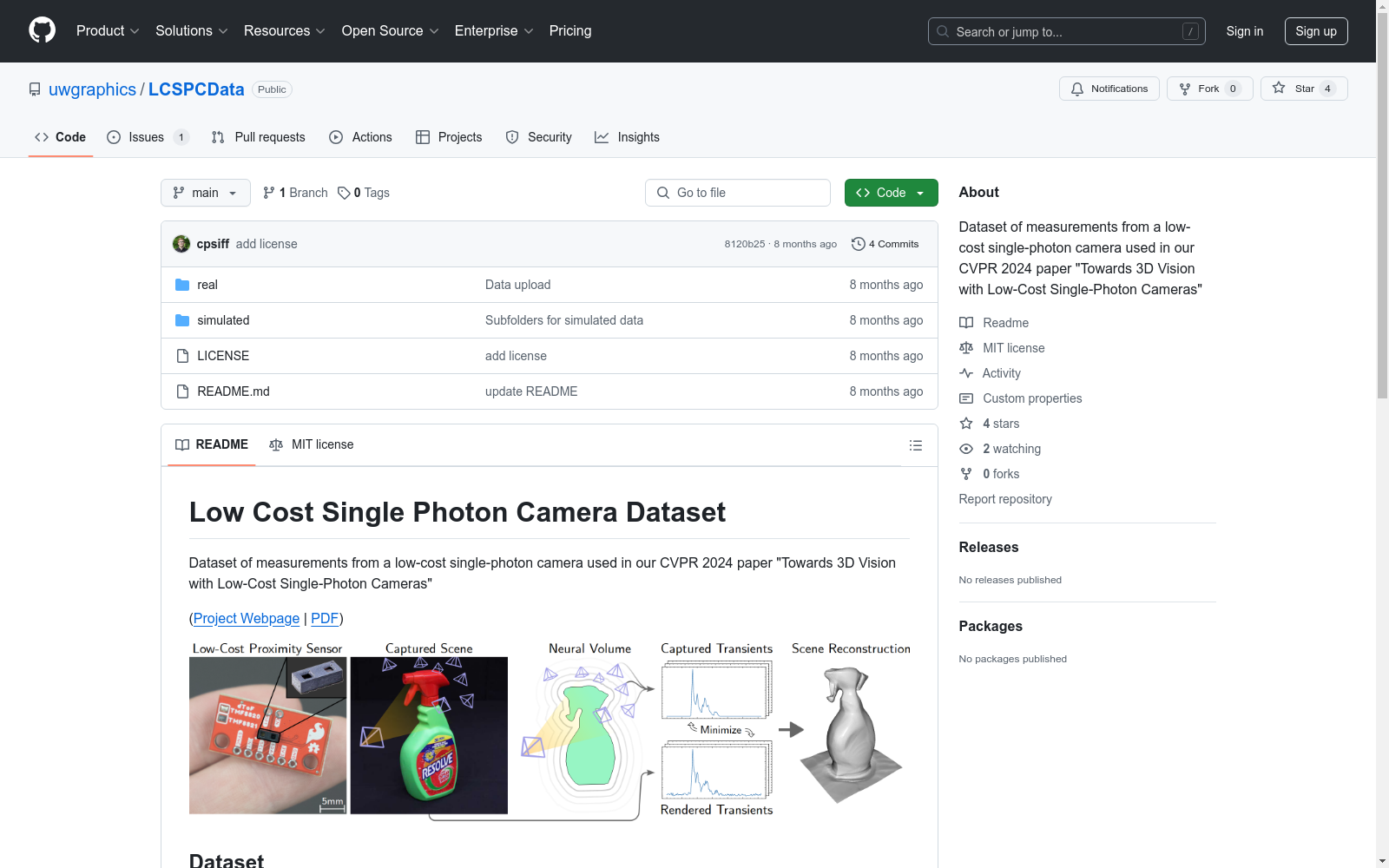
Low Cost Single Photon Camera Dataset
收藏github2024-04-23 更新2024-05-31 收录
下载链接:
https://github.com/uwgraphics/LCSPCData
下载链接
链接失效反馈官方服务:
资源简介:
该数据集包含真实和模拟数据。真实数据包括来自AMS TMF8820的姿态捕捉。模拟数据来自我们自己的模拟器。真实世界的捕捉是通过将传感器附着在机器人手臂上完成的,该手臂在捕捉测量数据时围绕物体移动。并非所有真实世界的捕捉都有地面实况。那些包含的则包含一个.stl文件和一个.blend文件的地面实况网格。
This dataset comprises both real and simulated data. The real data includes pose captures from the AMS TMF8820. The simulated data originates from our proprietary simulator. Real-world captures were conducted by attaching sensors to a robotic arm, which moved around the object during the capture of measurement data. Not all real-world captures include ground truth. Those that do contain ground truth include a .stl file and a .blend file for the ground truth mesh.
创建时间:
2024-04-23
原始信息汇总
数据集概述
数据集名称
Low Cost Single Photon Camera Dataset
数据集来源
该数据集用于CVPR 2024论文"Towards 3D Vision with Low-Cost Single-Photon Cameras"的研究。
数据内容
- 数据类型:包含真实数据和模拟数据。
- 真实数据:来自AMS TMF8820的姿态捕获数据,通过将传感器固定在机器人手臂上,围绕物体移动并捕获测量数据。
- 模拟数据:来自研究团队自建的模拟器。
- 地面实况:并非所有真实世界捕获的数据都包含地面实况。包含地面实况的数据集提供了.stl和.blend格式的地面实况网格文件。
文件格式
-
存储格式:.json文件。
-
数据结构: json [ { "reference_hist": [...], // (128,) array (仅真实数据) "hists": [...], // (9, 128) array (真实数据) 或 (128,) array (模拟数据) "pose": [...] // (4, 4) 从原点到传感器姿态的齐次变换 }, { // 重复多次测量 } ]
-
额外信息:真实数据中可能包含传感器温度、深度估计和机器人状态等额外字段,但这些可以忽略。
引用信息
若在已发表的工作中使用此数据集,请引用以下文献:
@article{Mu24Towards3DVision, title={Towards 3D Vision with Low-Cost Single-Photon Cameras}, author={Fangzhou Mu and Carter Sifferman and Sacha Jungerman and Yiquan Li and Mark Han and Michael Gleicher and Mohit Gupta and Yin Li}, year={2024}, eprint={2403.17801}, archivePrefix={arXiv}, primaryClass={cs.CV} }
搜集汇总
数据集介绍
构建方式
该数据集通过结合真实与模拟数据构建,旨在支持低成本单光子相机的三维视觉研究。真实数据来源于AMS TMF8820传感器,通过将传感器固定在机器人臂上,围绕物体进行姿态捕捉,从而获取测量数据。模拟数据则由自研模拟器生成,确保了数据多样性和实验可控性。部分真实数据集包含地面真实值,以.stl和.blend文件形式提供,便于验证和分析。
特点
此数据集的显著特点在于其混合了真实与模拟数据,提供了丰富的实验场景和验证手段。真实数据通过机器人臂的精确控制,捕捉了物体的多角度测量信息,而模拟数据则通过自研模拟器生成,确保了数据的多样性和可重复性。此外,数据集的文件格式统一为.json,便于解析和处理,且部分数据集包含地面真实值,为研究提供了可靠的基准。
使用方法
数据集的使用方法简便,用户可通过解析.json文件格式获取测量数据,包括参考直方图、测量直方图和传感器姿态等信息。对于真实数据,还可能包含传感器温度、深度估计和机器人状态等附加信息。用户可根据研究需求选择使用真实或模拟数据,并结合地面真实值进行算法验证和性能评估。如遇问题,可通过GitHub仓库提交问题进行反馈。
背景与挑战
背景概述
随着计算机视觉技术的迅猛发展,低成本单光子相机在3D视觉领域的应用逐渐受到关注。Low Cost Single Photon Camera Dataset由Fangzhou Mu等研究人员在2024年CVPR会议上发表的论文《Towards 3D Vision with Low-Cost Single-Photon Cameras》中提出,旨在探索低成本单光子相机在3D视觉任务中的潜力。该数据集包含了从AMS TMF8820传感器获取的真实数据以及研究人员自主开发的模拟数据,涵盖了多种场景下的测量数据。通过将传感器安装在机器人臂上进行多角度捕捉,该数据集为研究低成本单光子相机的3D重建能力提供了宝贵的资源,推动了该技术在计算机视觉领域的应用与发展。
当前挑战
该数据集在构建过程中面临诸多挑战。首先,真实数据的获取依赖于低成本单光子相机,其硬件性能和测量精度相对有限,导致数据噪声较大且难以处理。其次,由于并非所有真实数据都包含地面真实值,研究人员需要通过复杂的校准和模拟手段来弥补这一不足。此外,数据集的格式设计也需兼顾灵活性与高效性,以适应不同研究需求。在应用层面,如何利用该数据集进行高精度的3D重建和场景理解,仍是一个亟待解决的难题,尤其是在处理复杂光照条件和动态场景时,算法性能面临严峻考验。
常用场景
经典使用场景
Low Cost Single Photon Camera Dataset 在三维视觉领域中展现了其独特的应用价值。该数据集通过结合真实与模拟数据,为研究者提供了一个全面的实验平台,用于探索低成本单光子相机在三维重建中的性能。经典的使用场景包括利用该数据集进行三维物体的姿态估计与重建,尤其是在机器人操作和自动化系统中,通过分析相机捕获的光子数据来精确还原物体的三维结构。
衍生相关工作
基于该数据集,研究者们已经开展了一系列相关工作,包括改进的三维重建算法、光子数据处理技术以及低成本硬件的优化设计。这些衍生工作不仅提升了单光子相机在三维视觉中的应用效果,还为未来的研究提供了新的方向和灵感。例如,有研究通过分析该数据集中的光子分布,提出了新的深度估计模型,显著提高了三维重建的精度和鲁棒性。
数据集最近研究
最新研究方向
在计算机视觉领域,低成本单光子相机数据集的最新研究方向主要集中在通过低成本硬件实现高效的3D视觉重建。该数据集结合了真实和模拟数据,为研究人员提供了一个独特的平台,以探索如何在资源受限的环境中实现高精度的3D重建。随着CVPR 2024论文《Towards 3D Vision with Low-Cost Single-Photon Cameras》的发布,这一领域的研究进一步推动了低成本单光子相机在机器人、增强现实和自动驾驶等前沿应用中的潜力。通过结合机器人臂的运动捕捉和精确的姿态估计,该数据集为3D视觉技术的普及和应用提供了新的可能性,具有重要的学术和工业意义。
以上内容由遇见数据集搜集并总结生成


