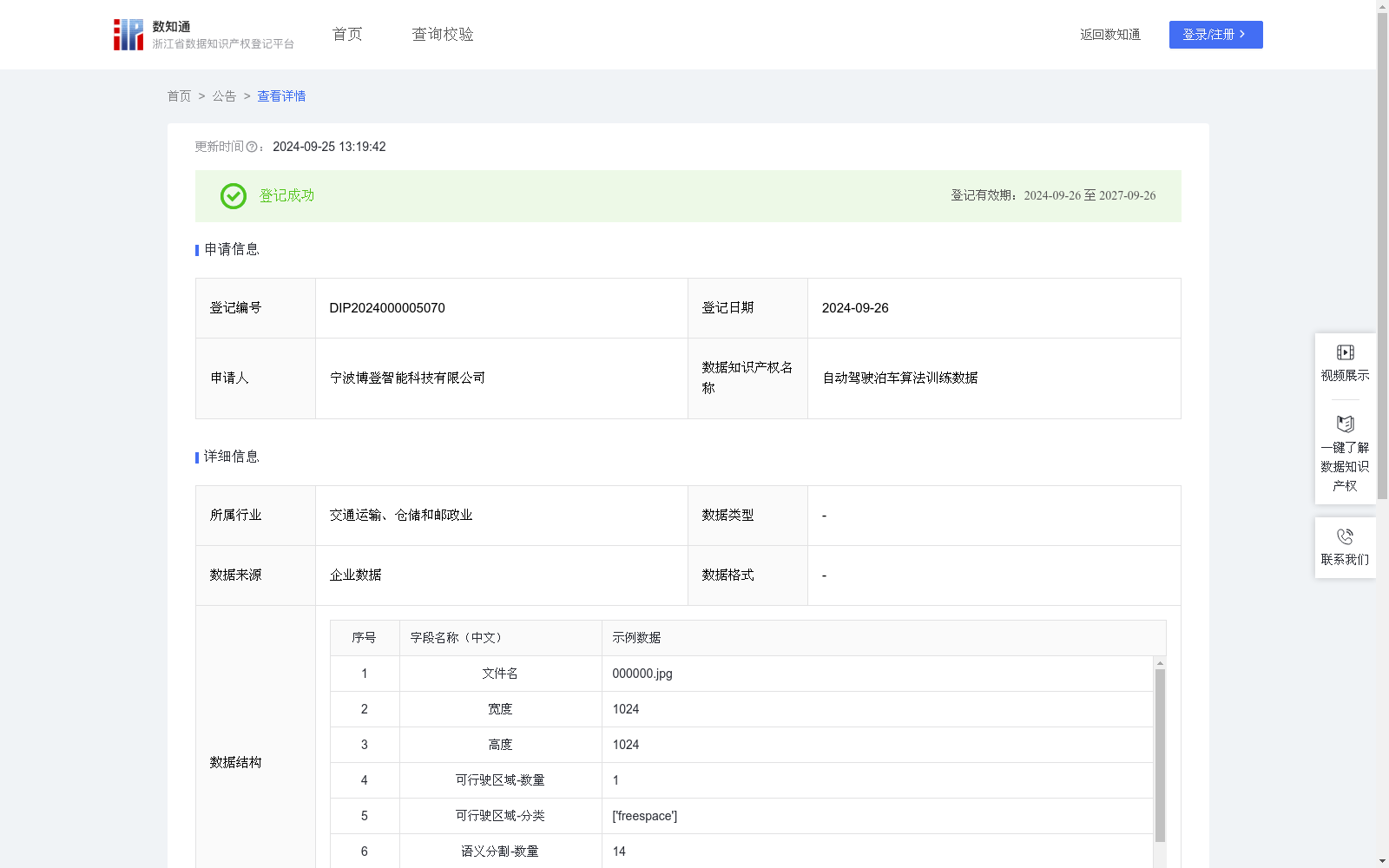
自动驾驶泊车算法训练数据
收藏浙江省数据知识产权登记平台2024-09-25 更新2024-09-27 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/64858
下载链接
链接失效反馈官方服务:
资源简介:
自动泊车是一个复杂多变的场景,当前停车场内的交通规则相对较为宽松,车道线也不如公共道路清晰严格,而且停车场内障碍物较多且杂乱,车间距离较近,同时行人可能随意穿行;同时泊车动作复杂,为了完成泊车任务,车辆需要进行频繁的倒车、停车、转向等操作;通过多样化的数据集可以帮助系统更好地适应复杂和多变的泊车环境,推动相关技术和算法的研究和创新,优化和提升自动驾驶泊车系统性能的基础,能够显著提升系统的精度、可靠性和安全性。一、目标对象:所有鸟瞰视角拼接图片,尺寸为1024px x 1024px。
二、预标注处理:
1. 可行驶区域预标注:
使用Oneformer识别"freespace"类别,通过OpenCV找出外接轮廓,将分割结果转为连续坐标点。
2. 语义分割预标注:
用Oneformer识别“lane”、“vegetation”、“slot_line”、“obstacle”、“pillar”、“ego”、“curb”等类别,并用OpenCV获取外接轮廓,转为坐标点。
3. 库位角点预标注:
用CenterNet检测“corner_points”,直接转换为坐标点。
三、技术要求:
1. 算法精度:
各项识别准确率须达95%以上。
2. 环境适应性:
算法需适应不同泊车场景及天气条件。
四、实施步骤:
1. 数据预处理:
进行去噪、增强等预处理,提高识别准确性。
2. 可行驶区域处理:
利用Oneformer识别freespace,获取坐标点。
3. 语义分割处理:
识别多个类别,获取坐标点。
4. 库位角点处理:
检测库位角点,获取坐标点。
Automatic parking is a complex and dynamic scenario. Currently, traffic regulations in parking lots are relatively loose, lane markings are less clear and standardized than those on public roads, parking lots are filled with numerous and cluttered obstacles, vehicles are parked in close proximity, and pedestrians may wander randomly. Moreover, parking maneuvers are complex: to complete the parking task, the vehicle needs to perform frequent operations such as reversing, stopping, and steering. Diverse datasets can help the system better adapt to complex and dynamic parking environments, promote research and innovation of related technologies and algorithms, serve as the foundation for optimizing and improving the performance of autonomous driving parking systems, and significantly enhance the system's accuracy, reliability, and safety.
1. Target Objects: All stitched bird's-eye view images with a resolution of 1024px × 1024px.
2. Pre-labeling Processing:
1. Pre-labeling for Drivable Area: Use Oneformer to identify the "freespace" category, extract the external contour via OpenCV, and convert the segmentation results into continuous coordinate points.
2. Semantic Segmentation Pre-labeling: Use Oneformer to identify categories including "lane", "vegetation", "slot_line", "obstacle", "pillar", "ego", and "curb", extract their external contours via OpenCV, and convert the results into coordinate points.
3. Pre-labeling for Parking Space Corners: Use CenterNet to detect "corner_points" and directly convert them into coordinate points.
3. Technical Requirements:
1. Algorithm Accuracy: The recognition accuracy for each category shall be no less than 95%.
2. Environmental Adaptability: The algorithm shall adapt to various parking scenarios and weather conditions.
4. Implementation Steps:
1. Data Preprocessing: Perform preprocessing operations such as denoising and data augmentation to improve recognition accuracy.
2. Drivable Area Processing: Use Oneformer to identify freespace and obtain coordinate points.
3. Semantic Segmentation Processing: Identify multiple categories and obtain coordinate points.
4. Parking Space Corner Processing: Detect parking space corners and obtain coordinate points.
提供机构:
宁波博登智能科技有限公司
创建时间:
2024-08-06
搜集汇总
数据集介绍
特点
该数据集是宁波博登智能科技有限公司提供的自动驾驶泊车算法训练数据,包含20001条鸟瞰视角拼接图片数据,尺寸为1024px x 1024px,用于训练自动驾驶泊车系统以适应复杂和多变的泊车环境。数据包含可行驶区域、语义分割和库位角点等标注信息,算法精度要求达95%以上。
以上内容由遇见数据集搜集并总结生成


