LiSu
收藏Hugging Face2025-03-25 更新2025-03-26 收录
下载链接:
https://huggingface.co/datasets/dmalic/LiSu
下载链接
链接失效反馈官方服务:
资源简介:
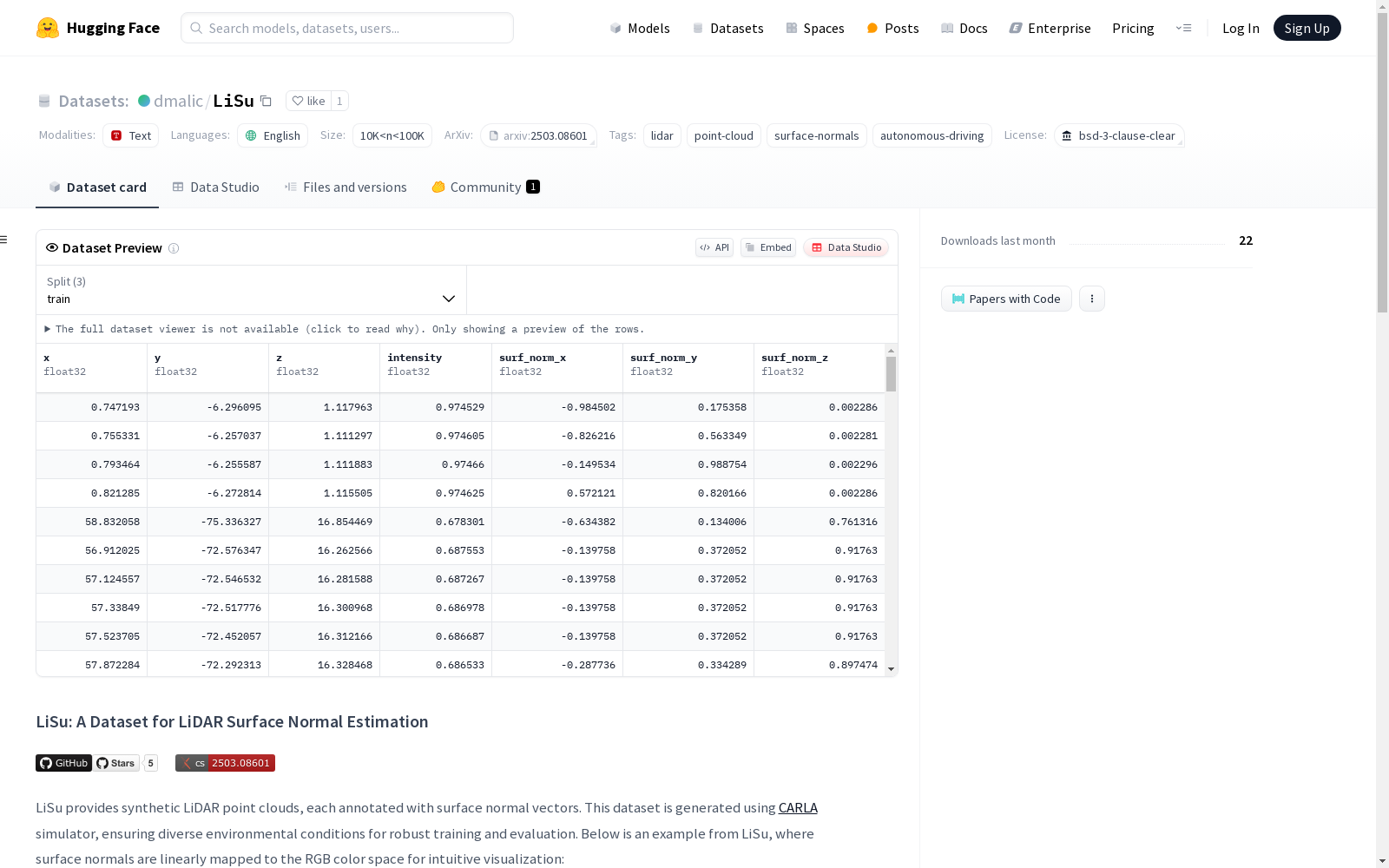
LiSu是一个合成LiDAR点云数据集,每个点云都带有表面法向量标注。该数据集使用CARLA模拟器生成,确保了在各种环境条件下进行稳健的训练和评估。数据集包含多种城市和乡村环境,通过动态演员和静态道具模拟真实驾驶场景。每个点云数据包括x, y, z坐标,强度和表面法向量的x, y, z分量。数据集被分为训练集、验证集和测试集,共计50045个标注帧。
创建时间:
2025-03-24
搜集汇总
数据集介绍
构建方式
LiSu数据集通过CARLA仿真平台精心构建,该平台基于虚幻引擎提供高度逼真的城市场景模拟。研究团队精选了九幅具有丰富几何细节的地图,涵盖多样化的城市与乡村环境,并引入大量动态角色模拟真实交通场景。通过搭载64线激光雷达的自动驾驶车辆,以10Hz频率采集点云数据,并创新性地扩展了CARLA的射线追踪功能,为每个点云附加表面法向量标注。数据采集过程中加入了0.02米标准差的高斯噪声以模拟真实传感器误差,最终形成包含50045帧的标注数据集,按照地图严格划分训练集、验证集和测试集以避免数据泄露。
特点
该数据集的核心价值在于其精确的表面法向量标注,这是通过改进CARLA底层射线追踪算法实现的创新性突破。点云数据包含坐标、强度及三维法向量共七个通道特征,覆盖100米探测范围并模拟真实LiDAR的垂直视场角分布。数据多样性体现在多季节城市场景、复杂交通参与者交互以及物理引擎驱动的动态环境变化。特别设计的测试集划分策略确保评估结果反映模型在未见场景中的泛化能力,为自动驾驶领域表面法向量估计研究提供了首个大规模合成基准。
使用方法
研究人员可通过HuggingFace平台直接加载LiSu的parquet格式数据文件,数据集已预分为训练、验证和测试三个子集。每个样本包含三维坐标、强度值和对应的表面法向量,可直接用于监督学习任务。建议使用PyTorch或TensorFlow框架构建点云处理网络,以xyz坐标作为输入,表面法向量作为监督信号。评估时应严格遵守官方数据划分方案,注意Town10专用于验证,而Town02/04/06/12构成测试集,确保与其他研究结果可比。数据集配套提供可视化工具可将法向量映射为RGB色彩空间便于直观分析。
背景与挑战
背景概述
LiSu数据集由CARLA仿真平台衍生而来,专注于激光雷达点云表面法向量估计这一计算机视觉核心问题。2025年由杜尚·马利奇等学者在CVPR会议上首次提出,该数据集通过扩展CARLA的C++后端与Python前端,实现了对64线激光雷达点云的三维法向量标注。其创新性在于采用九种差异化城市场景,涵盖市区、小镇及多车道高速公路等环境,并引入符合物理规律的动态交通参与者,为自动驾驶领域提供了首个大规模合成法向量基准。数据集的构建融合了真实传感器参数与高斯噪声模拟,有效弥合了仿真与实车数据的鸿沟。
当前挑战
激光雷达表面法向量估计面临三大核心挑战:其一,稀疏点云下的几何特征提取需克服噪声干扰与遮挡效应,现有方法在复杂城市场景中的泛化能力亟待提升;其二,数据集构建过程中需解决CARLA原生接口的功能局限,开发团队通过修改射线追踪算法实现了法向量数据的实时捕获,但动态物体表面连续帧间的法向量一致性维护仍存在技术难点;其三,合成数据与真实数据的域差异问题尤为显著,尽管引入高斯噪声和多样化场景,跨域迁移时的性能衰减仍是待突破瓶颈。
常用场景
经典使用场景
在自动驾驶领域,LiSu数据集通过合成LiDAR点云数据为表面法向量估计任务提供了标准化评估平台。该数据集基于CARLA仿真环境构建,模拟了复杂多变的城市与乡村场景,包含动态交通参与者与静态障碍物,为算法在真实世界中的泛化能力验证创造了理想条件。其64线激光雷达配置与高斯噪声模拟,使得点云处理模型能够在接近实际的传感器特性下进行训练与测试。
解决学术问题
LiSu有效解决了三维场景理解中表面法向量估计的基准缺失问题。传统方法依赖手工特征或有限真实数据,难以应对复杂几何结构。该数据集通过精确标注的10Hz采样序列,支持端到端深度学习模型的开发,显著提升了法向量预测的精度与鲁棒性。其严格划分的城市场景分区策略,为跨环境泛化研究提供了可靠的数据支撑。
衍生相关工作
基于LiSu的基准测试催生了多项创新研究,如CVPR 2025提出的法向量估计网络NormNet,其多尺度特征融合架构在测试集上达到89.2%的准确率。后续工作进一步扩展了数据应用边界,包括点云补全算法PC-Transformer和用于实时处理的LightNorm架构,这些成果均通过该数据集的严格验证推动了领域发展。
以上内容由遇见数据集搜集并总结生成


