MultiObjectBlender
收藏arXiv2025-03-13 更新2025-03-15 收录
下载链接:
https://yeonjin-chang.github.io/ROODI/
下载链接
链接失效反馈官方服务:
资源简介:
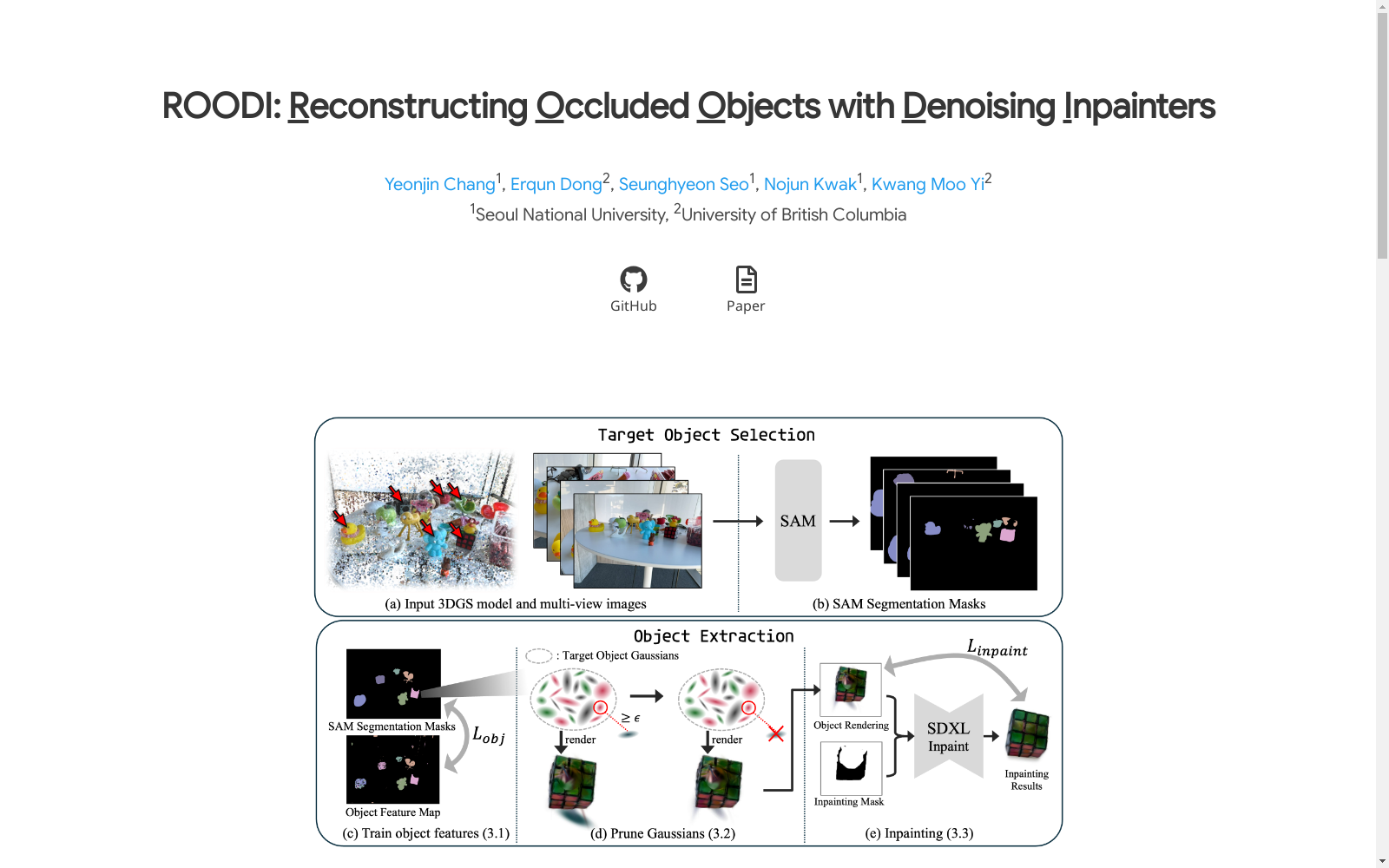
MultiObjectBlender数据集是由首尔国立大学和不列颠哥伦比亚大学创建的合成数据集。该数据集通过Blender渲染多个来自ShapeNet的对象组合而成,其中许多对象相互遮挡。数据集用于定量评估对象提取质量,支持从复杂场景中提取特定对象的研究。
The MultiObjectBlender Dataset is a synthetic dataset developed by Seoul National University and the University of British Columbia. It is constructed by rendering and combining multiple objects sourced from ShapeNet using Blender, with many of these objects mutually occluded. This dataset is designed for the quantitative evaluation of object extraction quality, and supports research on extracting specific objects from complex scenes.
提供机构:
首尔国立大学,不列颠哥伦比亚大学
创建时间:
2025-03-13
搜集汇总
数据集介绍
构建方式
MultiObjectBlender数据集的构建采用了3D场景合成的方法,使用ShapeNet模型库中的物体在Blender软件中渲染出多个复杂的场景。每个场景中包含了5到20个物体,其中3到4个物体被选为测试目标。为了定量评估,数据集同时提供了完整场景和目标物体的独立渲染图像。每个目标物体都有50张用于训练的完整场景图像和50张用于测试的独立渲染图像。
特点
该数据集的特点在于其复杂性,场景中的物体存在大量遮挡和反射,以及强烈的阴影,这为3D场景中的物体提取任务提供了挑战。此外,数据集的合成性质使得评估结果更加准确,因为可以比较独立渲染的目标物体与提取出的物体之间的差异。
使用方法
使用MultiObjectBlender数据集时,研究者可以将其作为3D场景中物体提取方法的测试平台。数据集提供的独立渲染图像可以作为目标物体的真实值,用于评估不同提取方法的效果。同时,完整场景的图像可以用于训练和测试物体提取算法。
背景与挑战
背景概述
MultiObjectBlender数据集的创建旨在为3D场景中特定对象的提取提供一个评估基准。该数据集由Seoul National University和University of British Columbia的研究团队于2025年提出,并在ROODI项目中得到应用。ROODI项目专注于从3D Gaussian Splatting模型中提取特定对象,即使这些对象被遮挡。该数据集的创建对于3D场景编辑和对象提取的研究具有重要意义,为评估和比较不同对象提取方法提供了标准化的测试平台。
当前挑战
MultiObjectBlender数据集面临的挑战主要包括:1)解决领域问题:从复杂场景中提取特定对象,即使这些对象被遮挡,仍然是一个挑战。现有的方法往往难以清晰地提取目标对象,并可能受到遮挡和浮点的影响。2)构建过程中的挑战:创建一个具有高真实感且包含多个相互遮挡对象的3D场景数据集需要精细的渲染技术和有效的对象标注策略。此外,由于场景的复杂性,如何准确地评估对象提取的质量也是一个挑战。
常用场景
经典使用场景
在3D场景重建与处理领域,MultiObjectBlender数据集以其多对象场景的合成能力,成为了评估和训练对象提取算法的宝贵资源。特别是在处理复杂场景中,该数据集提供的多对象遮挡情况,为研究如何从复杂场景中准确地提取单个对象提供了理想的测试环境。
解决学术问题
MultiObjectBlender数据集解决了3D场景重建中一个关键问题:如何从复杂场景中准确地提取单个对象。该数据集通过提供具有多种遮挡情况的合成场景,帮助研究者测试和改进他们的算法,以实现从3D场景中提取单个对象的目的。这对于场景编辑、动态场景重建、3D内容生成等应用具有重要意义。
衍生相关工作
基于MultiObjectBlender数据集的研究成果,衍生出了许多相关的工作,如OmniSeg3D、SAGA、Gau-Group等。这些工作通过使用3D Gaussian Splatting技术,结合语义编码和生成式修复技术,实现了从复杂场景中提取单个对象的目的。这些成果不仅提高了3D场景重建的精度和效率,也为相关领域的研究和应用提供了新的思路和方法。
以上内容由遇见数据集搜集并总结生成


