R2S100K
收藏arXiv2023-08-12 更新2024-06-21 收录
下载链接:
https://r2s100k.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
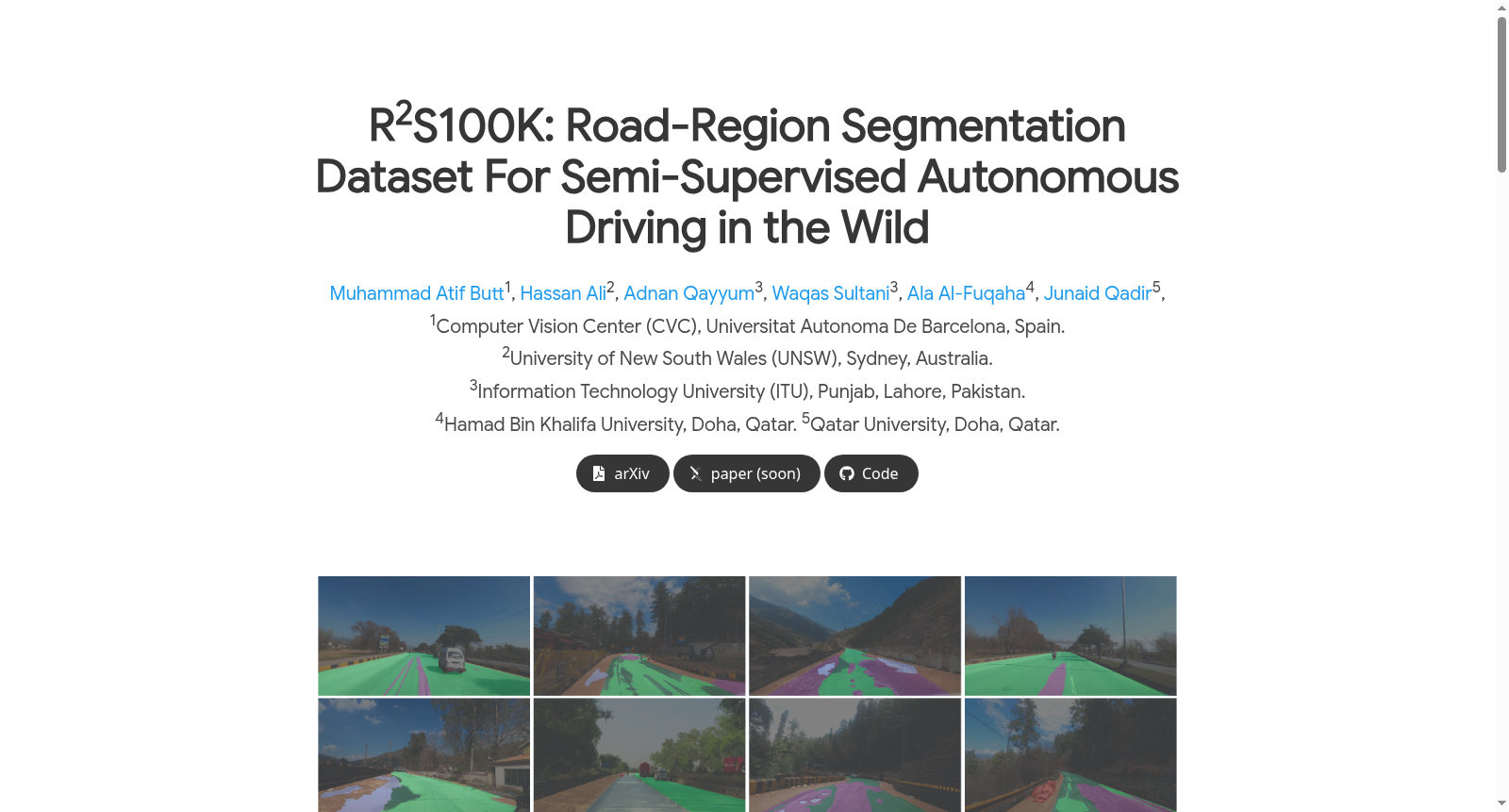
R2S100K数据集是由巴基斯坦信息技术大学(ITU)主导开发的大型道路区域分割数据集,专注于非结构化道路环境的挑战性场景。该数据集包含100,000张图像,覆盖超过1000公里的道路,其中14,000张图像具有精细的像素级标注,而86,000张图像未标注,适用于半监督学习方法。数据集的创建过程涉及从巴基斯坦不同地区收集视频序列,确保数据的多样性和代表性。R2S100K数据集的应用领域主要集中在提升自动驾驶系统在复杂道路条件下的性能,特别是在发展中国家常见的非标准道路基础设施中。
The R2S100K dataset is a large-scale road segmentation dataset led by the Information Technology University (ITU) of Pakistan, focusing on challenging scenarios in unstructured road environments. It comprises 100,000 images spanning over 1,000 kilometers of roadways, among which 14,000 images have fine-grained pixel-level annotations, while the remaining 86,000 unannotated images are well-suited for semi-supervised learning approaches. The dataset was constructed by collecting video sequences from various regions across Pakistan, ensuring data diversity and representativeness. The primary applications of the R2S100K dataset are centered on enhancing the performance of autonomous driving systems under complex road conditions, particularly in non-standard road infrastructures commonly prevalent in developing countries.
提供机构:
信息技术大学(ITU)
创建时间:
2023-08-12
搜集汇总
数据集介绍
构建方式
在自动驾驶视觉感知领域,现有数据集多聚焦于结构化城市道路,对包含坑洼、泥泞等复杂路况的非结构化道路覆盖不足。R2S100K数据集通过系统化数据采集流程构建,在巴基斯坦境内跨越1000多公里道路,涵盖高速公路、城市街道及乡村丘陵等多种地形。数据采集使用车载摄像头,以1.4米固定高度录制视频,并实施严格的质量控制流程,剔除模糊或曝光异常序列。最终从视频中按10秒间隔抽取帧图像,形成10万张初始图像集合,其中1.4万张经过精细像素级标注,其余8.6万张作为未标注数据,为半监督学习提供资源。
特点
该数据集的核心特征体现在其场景多样性与标注精细度。相较于现有自动驾驶数据集,R2S100K专门收录了大量非结构化道路场景,包含龟裂路面、砾石区、积水坑等14类危险道路区域,精准区分安全通行区域与高风险路段。数据覆盖不同光照条件与天气环境,有效反映了发展中国家典型道路基础设施特征。其标注体系采用分层多边形标注方法,避免类别重叠与边界模糊,同时保持与Cityscapes等主流数据集标签格式的兼容性,支持跨数据集域适应研究。
使用方法
R2S100K为道路区域分割任务提供多层次研究框架。在监督学习范式下,研究者可利用1.4万张标注图像训练分割网络,评估模型在复杂路况下的泛化能力。针对半监督学习,数据集配套提出高效数据采样方法,通过特征编码与聚类分析从未标注数据中选取代表性样本,构建平衡训练子集。该方法可集成于师生训练框架:教师模型在标注数据上训练后生成伪标签,结合原始标注共同训练学生模型。这种设计显著降低标注成本,提升模型在罕见道路场景下的识别精度,为自动驾驶系统在非标准道路环境中的安全部署提供验证平台。
背景与挑战
背景概述
在自动驾驶技术蓬勃发展的时代背景下,道路场景的语义理解是实现安全导航的核心基石。然而,现有主流数据集如Cityscapes、BDD100K等,其采集场景多集中于发达国家结构良好的城市道路,对全球范围内广泛存在的非结构化道路(如包含破损、坑洼、泥泞、砾石等多种危险路面的道路)覆盖严重不足。为填补这一关键空白,由巴基斯坦信息技术大学、哈马德·本·哈利法大学及卡塔尔大学等机构的研究人员于2023年共同创建了R2S100K数据集。该数据集旨在为自动驾驶在复杂野外环境下的道路区域分割任务提供一个大规模、多样化的基准,其核心研究问题是提升模型在非标准、高风险道路场景下的感知鲁棒性与泛化能力。通过收录超过1000公里道路、涵盖14类精细标注的10万张图像,R2S100K显著拓展了自动驾驶视觉感知的研究边界,对推动技术在全球不同基础设施条件下的普适性应用具有深远影响力。
当前挑战
R2S100K数据集致力于解决自动驾驶领域中一个长期被忽视的关键挑战:在非结构化、高风险道路场景下的精准语义分割。其首要挑战在于领域问题的复杂性,即需要模型能够准确区分安全路面(如沥青)与十余种具有视觉相似性但驾驶风险迥异的危险路面(如破损、湿滑、砾石、泥泞等),这对模型的细粒度识别与上下文理解能力提出了极高要求。在数据集构建过程中,研究者们面临多重挑战:一是数据采集与标注的艰巨性,需要在多样化的地形、光照与天气条件下,跨越超长里程收集具有代表性的非结构化道路图像,并进行耗时耗力的像素级精细标注;二是数据分布与平衡的难题,如何确保数量庞大的无标签图像(8.6万张)与有标签图像(1.4万张)在各类道路场景、危险类别上得到均衡且高效的利用,以克服半监督学习中常见的数据不平衡与模型偏见问题,是提升模型泛化性能的关键。
常用场景
经典使用场景
在自动驾驶视觉感知领域,R2S100K数据集为道路区域语义分割任务提供了关键支持。该数据集聚焦于非结构化道路环境,涵盖破损路面、泥泞区域、碎石路段等多种复杂场景,弥补了现有数据集在发展中国家道路基础设施表征上的不足。研究者常利用其14,000张精细标注图像与86,000张未标注图像,开发半监督学习框架,以提升模型在多样化道路条件下的泛化能力。
解决学术问题
R2S100K致力于解决自动驾驶研究中道路场景泛化性不足与标注成本高昂的学术难题。通过引入涵盖1000余公里非结构化道路的图像数据,该数据集缓解了现有基准对低资源地区道路表征的缺失问题。其配套的高效数据采样方法有效应对了半监督学习中的数据不平衡挑战,显著降低了标注需求,为语义分割模型在复杂环境中的稳健性评估提供了标准化平台。
衍生相关工作
围绕R2S100K衍生的研究多集中于半监督学习与域自适应方向。例如,基于该数据集提出的高效数据采样方法被拓展至Cityscapes、CamVid等现有基准,提升了传统分割模型在数据不平衡场景下的性能。后续工作进一步探索了教师-学生框架在多模态道路理解中的应用,推动了轻量化分割网络在边缘计算设备上的部署,为低资源环境下的自动驾驶技术发展提供了算法基础。
以上内容由遇见数据集搜集并总结生成


