GarmentLab Assets
收藏arXiv2024-11-02 更新2024-11-06 收录
下载链接:
https://garmentlab.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
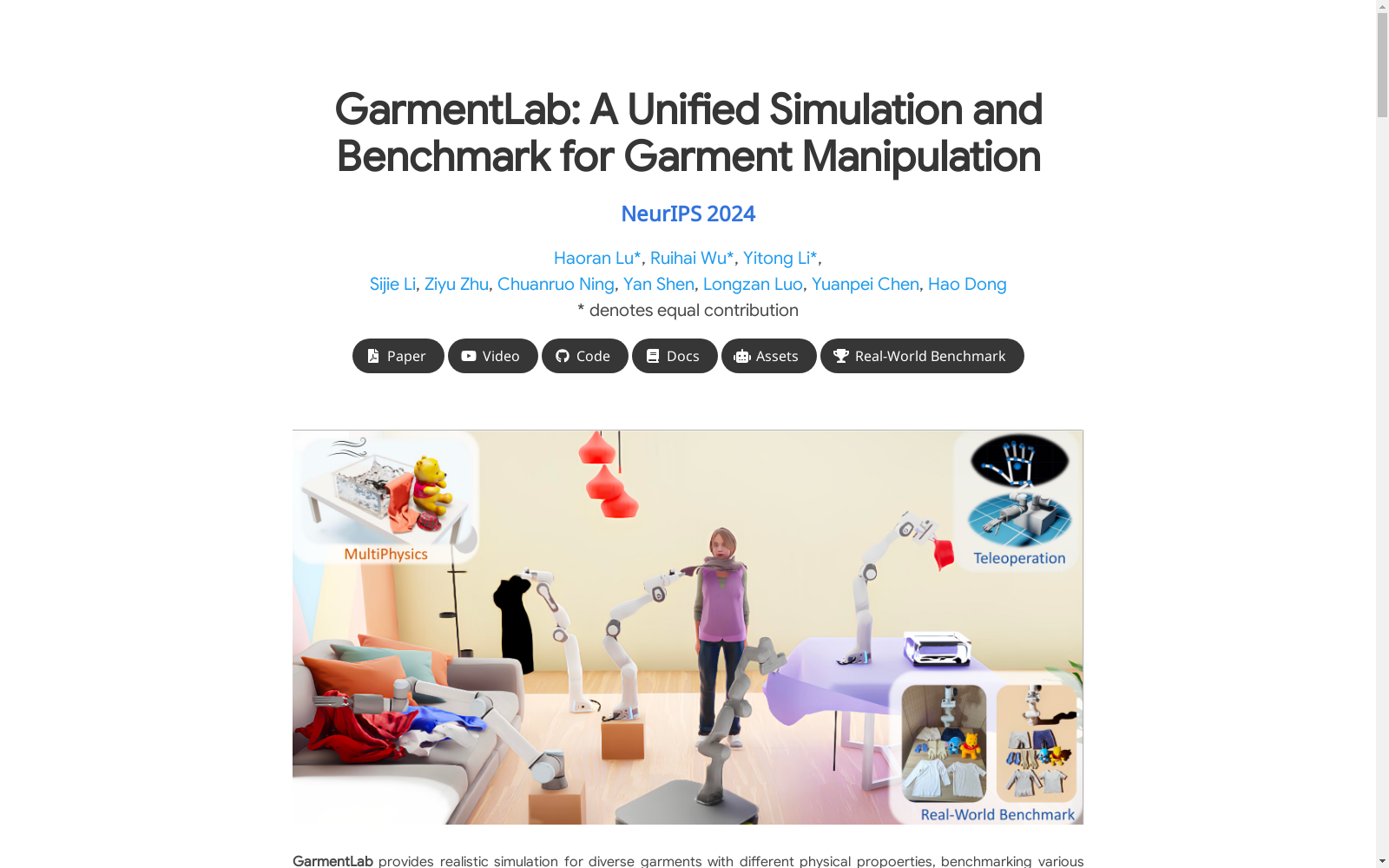
GarmentLab Assets是由北京大学计算机科学学院创建的一个大规模室内数据集,涵盖了11类日常服装模型、多种机器人末端执行器以及高质量的3D资产。数据集包含20个场景和超过9000个对象模型,主要用于评估基于视觉和强化学习的算法在服装和可变形物体操作任务中的表现。数据集的创建过程结合了多种物理模拟方法,如有限元法和基于粒子的动力学,旨在模拟真实世界的物理交互。该数据集的应用领域主要集中在机器人和计算机视觉中,旨在解决服装操作中的复杂动态和拓扑结构问题。
GarmentLab Assets is a large-scale indoor dataset developed by the School of Computer Science, Peking University. It encompasses 11 categories of daily clothing models, a variety of robotic end-effectors, and high-quality 3D assets. The dataset includes 20 scenes and more than 9,000 object models, and is primarily utilized to evaluate vision-based and reinforcement learning algorithms for garment and deformable object manipulation tasks. Its development integrates multiple physical simulation approaches, including the finite element method and particle-based dynamics, with the goal of simulating real-world physical interactions. This dataset is mainly applied in the fields of robotics and computer vision, aiming to address the challenges posed by complex dynamics and topological structures in garment manipulation.
提供机构:
北京大学计算机科学学院
创建时间:
2024-11-02
搜集汇总
数据集介绍
构建方式
GarmentLab Assets数据集的构建方式体现了对多样化室内场景和复杂物理交互的深入考量。该数据集整合了来自多个先进数据源的模拟内容,包括ClothesNet、ShapeNet、PartNet和YCB数据集,涵盖了从日常服装到各种机器人末端执行器以及高质量3D资产的广泛类别。通过使用Universal Scene Description文件存储所有资产及其属性,包括物理、语义和渲染属性,确保了模拟场景的完整性和真实性。此外,数据集还特别关注了多物理模拟的丰富性,通过结合多种模拟方法如PBD和FEM,以及与ROS的集成,提供了高效的远程操作数据收集管道,从而显著提升了数据集的实用性和研究价值。
特点
GarmentLab Assets数据集的显著特点在于其内容的丰富性和多样性。数据集不仅包括了11个类别的日常服装模型,还涵盖了多种机器人末端执行器,如夹持器、吸盘和灵巧手,以及从ShapeNet中提取的20个场景和9000多个对象模型。这种多样性不仅体现在对象的种类上,还包括了物理交互的深度和复杂性,如刚体、可变形物体、流体和人体模型的交互。此外,数据集通过集成多种模拟方法和现实世界的基准测试,有效地缩小了模拟与现实之间的差距,为研究者提供了一个高度真实和可控的实验环境。
使用方法
GarmentLab Assets数据集的使用方法灵活多样,适用于多种研究场景。研究者可以通过该数据集进行视觉算法、强化学习和模仿学习等多种算法的评估和训练。数据集提供了丰富的任务类型,分为五个主要类别,涵盖了从基础的服装操作到复杂的长期任务。使用者可以根据具体研究需求选择合适的任务和场景进行实验。此外,数据集还支持与ROS和MoveIt的集成,提供了高效的远程操作和运动规划功能,进一步增强了数据集的实用性和可扩展性。通过详细的文档和示例代码,研究者可以快速上手并充分利用数据集的各项功能。
背景与挑战
背景概述
Garment manipulation has been a pivotal area in the development of home-assistant robots, yet it remains fraught with challenges due to the intricate dynamics and topological structures of garments. The GarmentLab Assets dataset, introduced in the paper 'GarmentLab: A Unified Simulation and Benchmark for Garment Manipulation,' addresses these challenges by providing a comprehensive benchmark and realistic simulation environment for deformable object and garment manipulation. Developed by researchers from Peking University and Tsinghua University, the dataset was created to foster advancements in reinforcement learning and vision-based methods by offering a diverse range of garment types, robotic systems, and manipulators. The dataset's creation was driven by the need to overcome the limitations of current benchmarks, which often lack task diversity and exhibit unrealistic simulation behaviors. GarmentLab Assets aims to bridge the sim-to-real gap by incorporating multiple simulation methods and proposing sim-to-real algorithms, thereby enhancing the generalization capabilities of current algorithms.
当前挑战
The GarmentLab Assets dataset faces several significant challenges. Firstly, each garment possesses nearly infinite states and complex kinematic and dynamic properties, necessitating models that can comprehend various self-deform states, which requires a substantial amount of training data. Secondly, garment manipulation involves interactions with various types of objects, including rigid, articulated, and fluid entities, making it crucial for models to understand these interactions across diverse physical media. Finally, the manipulation strategies for garments are often highly complex, and visual perception of garments is challenging due to their diverse states and patterns, leading to a greater sim-to-real gap. Additionally, the dataset's creation process encountered challenges such as the impracticality of directly collecting data from the real world and the limitations of current deformable simulations, which often lack garment meshes and offer a limited range of tasks.
常用场景
经典使用场景
GarmentLab Assets数据集的经典使用场景主要集中在服装操作和变形对象的模拟与基准测试中。该数据集提供了丰富的服装模型、机器人末端执行器和高质量的3D资产,支持多种物理模拟方法,如PBD和FEM。这些资产被广泛用于评估视觉方法、强化学习和模仿学习算法在处理复杂服装任务中的表现,特别是在理解服装的动态特性和物理交互方面。
衍生相关工作
GarmentLab Assets数据集的发布催生了一系列相关研究工作,特别是在服装操作和变形对象模拟领域。许多研究者利用该数据集进行算法改进和性能评估,推动了视觉方法、强化学习和模仿学习在服装操作中的应用。此外,该数据集还激发了对多物理模拟和sim-to-real技术的新研究,进一步扩展了其在机器人和计算机视觉领域的应用范围。
数据集最近研究
最新研究方向
在服装操控领域,GarmentLab Assets数据集的最新研究方向主要集中在提升机器人对服装和可变形物体的操控能力。研究者们致力于通过强化学习和视觉方法来解决服装操控中的复杂动力学和拓扑结构问题。前沿研究不仅关注单一服装的折叠和展开任务,还扩展到多物理场交互,如服装与流体、刚体和人体模型的互动。此外,研究还着重于缩小模拟与现实之间的差距,通过引入多种模拟方法和现实世界基准,以提升算法的泛化能力和实际应用效果。
相关研究论文
- 1GarmentLab: A Unified Simulation and Benchmark for Garment Manipulation北京大学计算机科学学院 · 2024年
以上内容由遇见数据集搜集并总结生成


