RTK-SLAM Dataset
收藏arXiv2026-04-08 更新2026-04-10 收录
下载链接:
https://rtk-slam-dataset.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
该数据集由斯图加特大学团队开发,旨在解决RTK-SLAM系统在GNSS信号退化环境下的全局绝对精度评估问题。数据集包含城市公园和建筑工地两个典型场景的4条序列,总长度约2.37公里,覆盖开阔天空、建筑物遮挡、地下通道及室内外过渡等多种GNSS条件。数据通过手持设备采集,集成Livox MID360激光雷达、IMU、相机和RTK GNSS接收器,并首次采用全站仪独立建立亚厘米级大地测量真值。其创新性在于将RTK仅作为系统输入而非真值,填补了现有SLAM基准在全局绝对精度评估方面的空白,适用于地理测绘、建筑监测和机器人导航等领域。
This dataset was developed by the team at the University of Stuttgart to address the global absolute accuracy evaluation problem of RTK-SLAM systems in GNSS-degraded environments. It includes four sequences from two typical scenarios: urban parks and construction sites, with a total length of approximately 2.37 km, covering various GNSS conditions such as open sky, building occlusion, underpasses, and indoor-outdoor transitions. The data was collected via handheld devices integrated with Livox MID360 LiDAR, IMU, camera and RTK GNSS receiver, and is the first to independently establish sub-centimeter geodetic ground truth using a total station. Its innovation lies in treating RTK solely as a system input rather than ground truth, filling the gap in existing SLAM benchmarks for global absolute accuracy assessment, and is applicable to fields such as geomatics, construction monitoring and robotic navigation.
提供机构:
斯图加特大学·摄影测量与地理信息研究所
创建时间:
2026-04-08
原始信息汇总
数据集概述
基本信息
- 数据集名称: An RTK-SLAM Dataset for Absolute Accuracy Evaluation in GNSS-Degraded Environments
- 发布会议: ISPRS Congress 2026
- 作者: Wei Zhang, Vincent Ress, David Skuddis, Uwe Soergel, Norbert Haala
- 机构: Institute for Photogrammetry and Geoinformatics, University of Stuttgart
- 论文链接: https://rtk-slam-dataset.github.io/
- 数据集链接: https://rtk-slam-dataset.github.io/
- 代码链接: https://rtk-slam-dataset.github.io/
核心目标
提供用于评估RTK-SLAM系统在GNSS信号退化环境下绝对精度的地理参考数据集和评估方法。关键设计原则是将RTK接收器仅用作系统输入,而通过大地测量全站仪独立建立地面真值,以弥补现有基准测试的不足。
数据集内容
传感器平台
- Livox MID360 LiDAR:集成IMU,水平360°,垂直59°视场角,10 Hz,非重复扫描模式。
- 2 MP全局快门相机:硬件触发,约10 Hz。
- UM980 GNSS接收器:通过德国SAPOS服务提供RTK校正,在开阔天空下具有厘米级精度。
- 同步机制:LiDAR及其内置IMU通过1 PPS信号与GNSS时间硬件同步。所有外参均经过仔细校准。
场景与序列
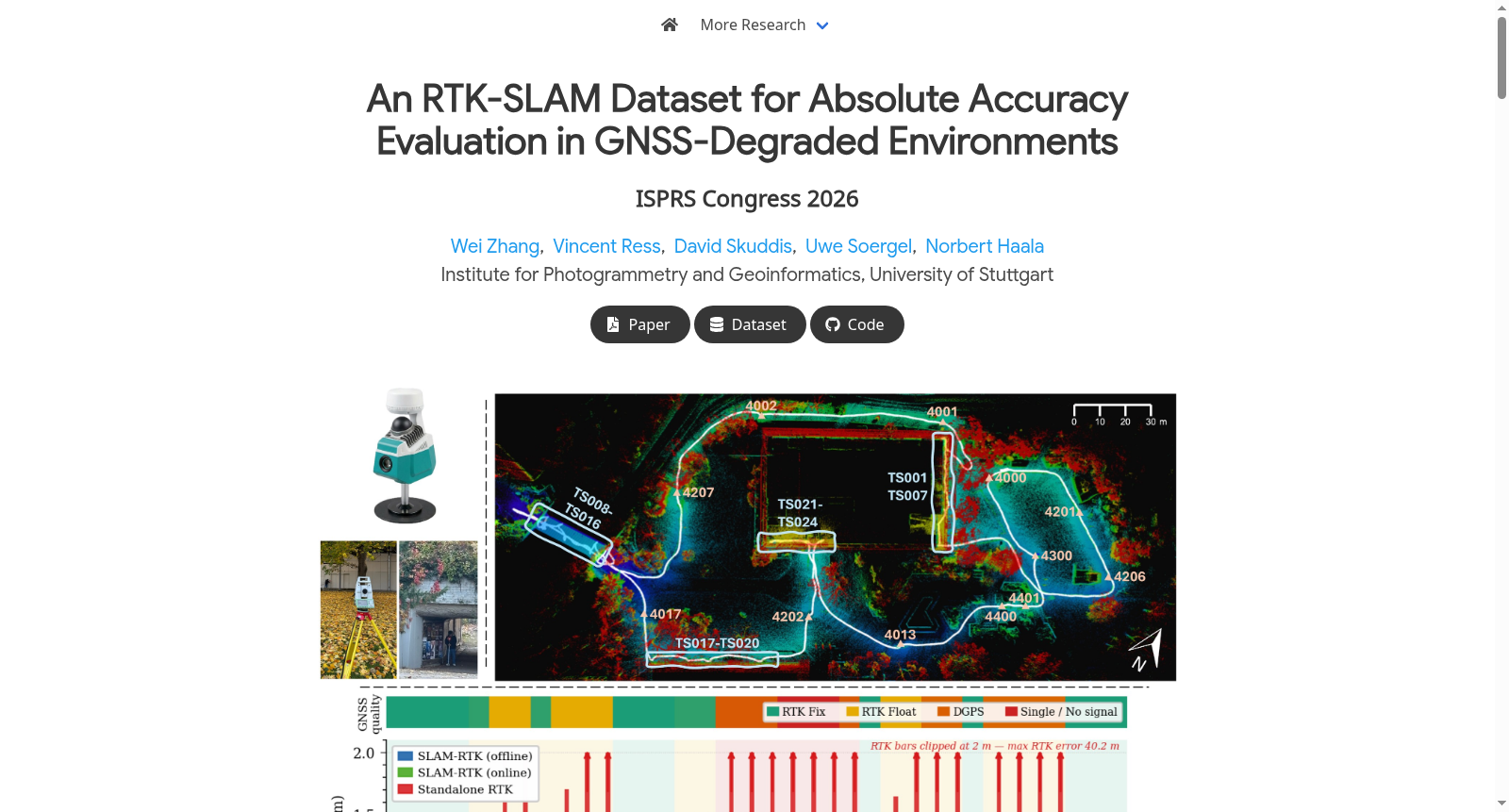
- Stadtgarten:斯图加特公共公园。包含两个序列(1.04 km和0.46 km),涵盖开阔天空、部分遮挡(建筑物/树木)和完全GNSS拒止的30米地下通道三种GNSS区域。共55个控制点。
- Construction Hall:斯图加特大学IntCDC建筑工地。包含两个序列(顺时针和逆时针,0.48 km和0.39 km)。每个序列以RTK固定开始和结束于室外,并穿越GNSS信号严重退化的室内区域(>400秒,~150米)。共32个控制点。
数据统计
- 序列数量: 4
- 控制点数量: 87
- 地面真值精度: <1 cm
- 总路径长度: 2.4 km
- 总持续时间: ~64 min
数据格式
每个序列包含同步的LiDAR、相机、IMU和RTK数据,提供三种格式:
- ROS1 (.bag)
- ROS2 (.db3)
- EuRoC(扩展格式,兼容OKVIS2-X)
大地测量地面真值
通过独立于RTK接收器的两阶段程序建立:
- 通过静态GNSS观测(<5 mm标准差)测量开阔天空锚点。
- 使用Leica TS16全站仪定向到这些锚点,并测量所有剩余控制点(包括GNSS遮挡和拒止区域内的点),通过导线测量传播全球参考框架。 所有控制点的最终地面真值精度优于1 cm。
评估方法与结果
关键发现
- 标准SE(3)对齐的ATE不适用于评估RTK-SLAM。一个与真实全局位置相距数米的轨迹,如果其内部几何一致,仍可能产生接近零的SE(3)对齐ATE。
- 评估协议直接将估计位置与大地测量调查的控制点进行比较(无任何对齐),揭示了标准基准测试会隐藏的全局漂移。
- 对齐差距可达76%,意味着标准指标可能低估真实绝对误差高达4倍。
基准测试方法
评估了三种RTK-SLAM配置:
- FAST-LIO-SAM:LiDAR-惯性-GNSS系统,结合FAST-LIO2前端和因子图后端。报告在线和离线(批量位姿图优化)结果。
- OKVIS2-X(vig):基于关键帧的视觉-惯性-GNSS系统,通过4-DoF帧对齐紧密集成GNSS。
- OKVIS2-X(lvig):扩展了LiDAR的相同系统(LiDAR-视觉-惯性-GNSS)。与vig配置比较以量化LiDAR的贡献。
- Standalone RTK:无任何里程计集成的直接RTK定位。
定量结果
| 场景 | 序列 | FAST-LIO-SAM | OKVIS2-X(vig) | OKVIS2-X(lvig) | RTK [m] |
|---|---|---|---|---|---|
| 在线 [m] | 离线 [m] | SE3 [m] | 差距 [%] | ||
| Stadtgarten | Seq. 1 | 0.162 | 0.068 | 0.065 | 4 |
| Stadtgarten | Seq. 2 | 0.150 | 0.099 | 0.077 | 22 |
| Constr. Hall | Seq. 1 | 0.256 | 0.248 | 0.220 | 11 |
| Constr. Hall | Seq. 2 | 0.439 | 0.373 | 0.089 | 76 |
GNSS中断下的漂移
- LiDAR辅助方法显示出低漂移率:FAST-LIO-SAM为9.2 cm/min(路径的0.25%),OKVIS2-X(lvig)为8.0 cm/min(0.22%)。
- 一旦信号质量恶化,独立RTK会迅速退化。
下载信息
- 所有格式(HuggingFace): https://rtk-slam-dataset.github.io/
- 评估代码: https://rtk-slam-dataset.github.io/
引用格式
bibtex @article{zhang2026rtkslam, title={An RTK-SLAM Dataset for Absolute Accuracy Evaluation in GNSS-Degraded Environments}, author={Zhang, Wei and Ress, Vincent and Skuddis, David and Soergel, Uwe and Haala, Norbert}, journal={The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences}, year={2026} }
搜集汇总
数据集介绍
构建方式
在移动测绘与机器人定位领域,精确的全局参考数据至关重要。RTK-SLAM数据集的构建采用了严谨的测量学方法,通过手持集成Livox MID360激光雷达、全局快门相机、IMU及UM980 GNSS接收器的设备,在代表性地形中采集数据。其核心创新在于将RTK仅作为系统输入,而地面真值则通过Leica TS16全站仪与静态GNSS观测独立建立,实现了亚厘米级精度的独立地理参考,避免了现有数据集中GNSS同时作为输入与真值的混淆。数据采集涵盖开阔天空、建筑遮挡、地下通道及室内外过渡等多种GNSS条件,确保了数据在复杂环境下的代表性与评估价值。
特点
该数据集在SLAM与地理空间数据融合领域具有显著特色。其首要特征在于提供了严格分离的RTK输入与全站仪地面真值,使得直接评估RTK-SLAM系统的绝对全局精度成为可能,弥补了传统评估中SE(3)对齐掩盖全局误差的缺陷。数据集包含两个典型场景(城市公园与建筑大厅)共四条序列,覆盖了从GNSS良好到完全拒止的连续条件,并提供了精确的传感器标定参数与时间同步信息。此外,数据以ROS bag和EuRoC格式公开,并进行了隐私处理,为研究社区提供了高可靠性、多模态且可直接用于绝对精度分析的基准资源。
使用方法
该数据集适用于评估任何输出全局参考坐标的SLAM系统。研究人员可通过提供的转换流程,将系统估计的轨迹转换至UTM坐标系,并与独立测量的检查点坐标进行直接比较,计算未经过SE(3)对齐的绝对轨迹误差,从而量化全局定位精度。同时,数据集也支持计算传统的SE(3)对齐相对精度,通过对比两者差异,可揭示系统存在的全局漂移或系统性误差。配套的评估脚本与校准文件简化了流程,使得该数据集能有效用于分析不同传感器配置(如激光雷达-惯性、视觉-惯性及其与GNSS的融合)在GNSS退化环境下的性能表现与漂移行为。
背景与挑战
背景概述
在测绘与机器人导航领域,实现高精度且全局参考的定位是核心挑战。传统大地测量技术虽能提供毫米级精度,但依赖于静态仪器设置,数据采集效率低下。同时定位与地图构建技术能够在全球导航卫星系统信号受限环境中提供相对一致的定位,但其结果通常局限于局部坐标系。为了融合两者的优势,RTK-SLAM技术应运而生,它将SLAM与实时动态载波相位差分技术相结合,旨在提供兼具相对一致性与全局参考坐标的移动测绘解决方案。由斯图加特大学摄影测量与地理信息研究所的研究人员于2026年创建的RTK-SLAM数据集,正是为了填补该领域在绝对精度评估方面的空白。该数据集的核心研究问题在于,现有评估标准通过SE(3)对齐掩盖了全局漂移,无法真实反映RTK-SLAM系统在全球坐标系下的绝对定位精度。该数据集通过独立的大地测量真值,为定量评估混合系统在GNSS信号退化或拒止环境下的全局定位性能提供了首个基准,对推动移动测绘、建筑信息模型集成及自主机器人导航等领域的发展具有重要影响力。
当前挑战
RTK-SLAM数据集旨在解决的领域挑战是精确评估SLAM与RTK GNSS融合系统在复杂环境下的绝对全局定位精度。传统评估指标如绝对轨迹误差在进行SE(3)对齐优化时会吸收全局漂移和系统误差,导致评估结果过于乐观,无法真实反映系统在测绘等对绝对坐标要求严格的应用中的实际性能。该挑战的核心在于如何设计一种评估框架,能够直接、无偏地度量轨迹在全球参考系中的误差。在数据集构建过程中,研究人员面临多重技术挑战。首要挑战是实现输入与真值的彻底分离,即确保RTK接收机仅作为系统输入,而真值需通过全站仪等大地测量手段独立建立,这避免了现有数据集中将GNSS直接作为真值一部分所带来的评估偏差。其次,在涵盖开放天空、建筑遮挡、地下通道及室内外过渡等多种GNSS条件的场景中,建立厘米级精度的、连续且统一的大地测量真值网络,涉及复杂的测量工程与坐标传递。此外,多传感器的时间同步与空间标定精度也直接影响到数据质量与后续评估的可靠性。
常用场景
经典使用场景
在测绘与机器人定位领域,RTK-SLAM数据集为评估融合实时动态GNSS与同步定位与建图系统的绝对精度提供了基准。该数据集通过手持设备在开放天空、建筑遮挡、地下通道及室内外过渡等多种GNSS信号条件下采集,涵盖了激光雷达、相机、惯性测量单元及RTK接收器的同步数据。其经典应用场景在于系统性地量化RTK-SLAM在GNSS信号退化或完全缺失环境中的全局定位性能,尤其侧重于揭示传统SE(3)对齐评估方法所掩盖的绝对误差,从而推动高精度地理参考移动测绘技术的发展。
衍生相关工作
该数据集衍生了一系列聚焦于多传感器紧耦合与全局精度优化的经典研究工作。例如,基于数据集的评估推动了如FAST-LIO-SAM等激光雷达-惯性- GNSS松耦合系统,以及OKVIS2-X等支持视觉-惯性-激光雷达- GNSS紧耦合的可配置关键帧SLAM系统的性能分析与改进。这些工作深入探讨了在长时GNSS中断下,激光雷达里程计与视觉惯性里程计对于约束全局漂移的相对贡献,并量化了离线全局优化相较于在线估计在提升绝对精度方面的显著收益。此外,数据集也激发了对于原始GNSS观测值紧耦合入SLAM估计器等前沿方向的探索,以期在GNSS信号退化过渡区进一步改善全局定位的鲁棒性与精度。
数据集最近研究
最新研究方向
在测绘与机器人定位领域,RTK-SLAM数据集的研究前沿聚焦于全球绝对精度评估方法的革新。传统SLAM基准普遍采用SE(3)对齐的绝对轨迹误差(ATE)作为评价指标,这一方法通过最优刚体变换对齐估计轨迹与参考轨迹,从而掩盖了全局漂移和系统误差,无法真实反映RTK-SLAM系统在GNSS信号退化或缺失环境下的全球定位精度。针对这一局限,该数据集首次将RTK测量严格作为系统输入,而非地面真值,同时通过大地测量全站仪独立建立亚厘米级精度的地理参考真值,实现了户外至室内场景中绝对全球精度的直接评估。研究表明,SE(3)对齐可能低估高达76%的绝对定位误差,而融合LiDAR的RTK-SLAM系统在GNSS拒止环境下仍能保持分米级全球精度,显著优于独立RTK的数十米级误差。这一进展推动了高精度地理参考移动测绘与无缝室内外导航技术的发展,为建筑监测、资产管理和快速勘测等应用提供了更为可靠的评估基准。
相关研究论文
- 1An RTK-SLAM Dataset for Absolute Accuracy Evaluation in GNSS-Degraded Environments斯图加特大学·摄影测量与地理信息研究所 · 2026年
以上内容由遇见数据集搜集并总结生成


