HeLiMOS
收藏arXiv2024-08-13 更新2024-08-14 收录
下载链接:
https://sites.google.com/view/helimos
下载链接
链接失效反馈官方服务:
资源简介:
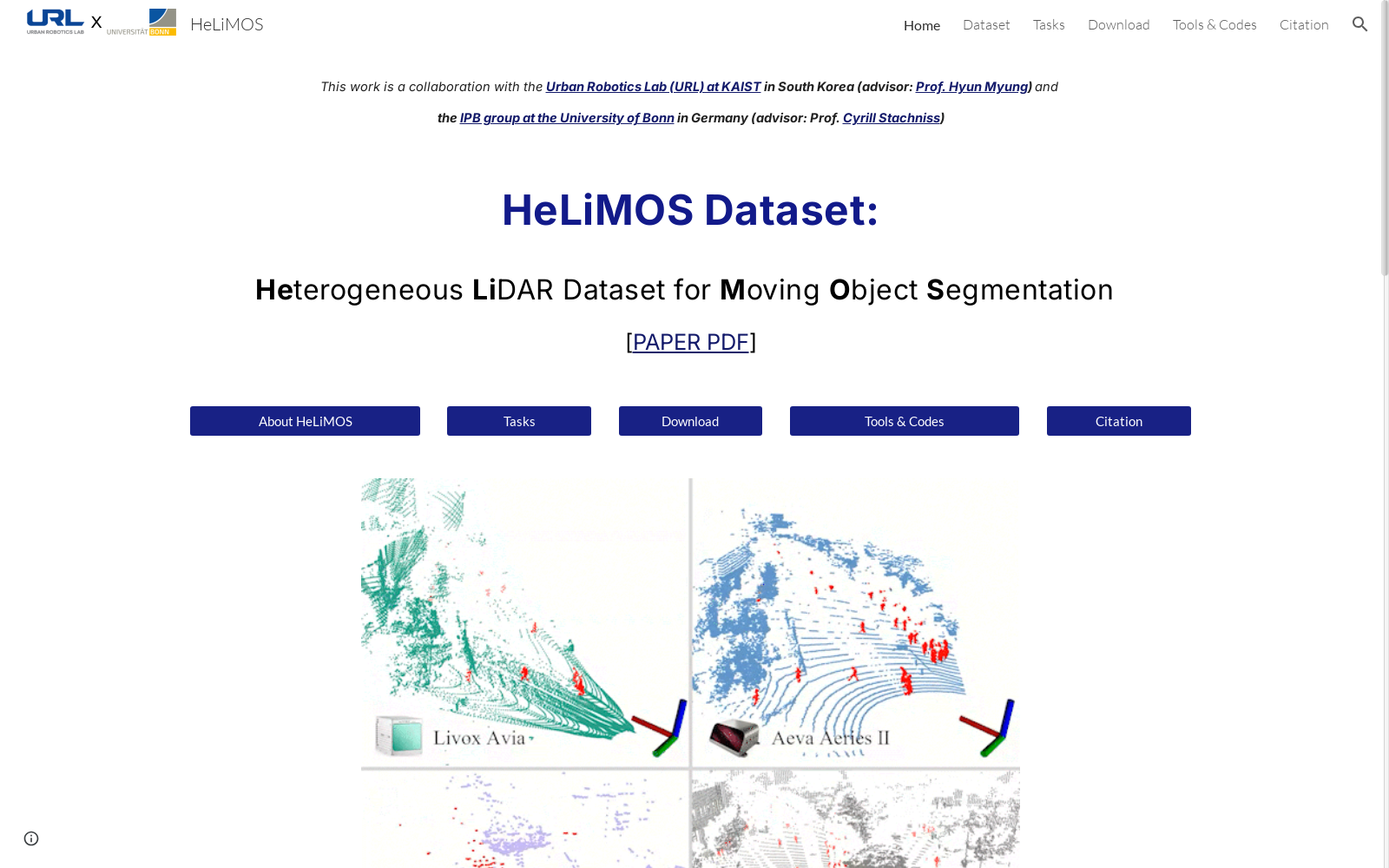
HeLiMOS数据集由韩国高等科学技术研究院和波恩大学机器人中心共同创建,专注于从异构激光雷达传感器中分割移动物体。该数据集包含由四种不同激光雷达传感器捕获的3D点云数据,并提供了点级别的移动物体分割标签。数据集的创建过程中采用了新颖的自动标注方法,显著减少了人工标注的工作量。HeLiMOS数据集主要用于评估和推动移动物体分割技术的发展,特别是在异构激光雷达传感器配置下的应用。
The HeLiMOS dataset was co-created by the Korea Advanced Institute of Science and Technology (KAIST) and the Robotics Center of the University of Bonn, focusing on moving object segmentation from heterogeneous LiDAR sensors. This dataset contains 3D point cloud data captured by four distinct LiDAR sensors, and provides point-level moving object segmentation labels. A novel automatic annotation method was adopted during the dataset's creation, which significantly reduced the manual annotation workload. The HeLiMOS dataset is primarily used to evaluate and advance the development of moving object segmentation technologies, especially for applications under heterogeneous LiDAR sensor configurations.
提供机构:
韩国高等科学技术研究院
创建时间:
2024-08-13
搜集汇总
数据集介绍
构建方式
HeLiMOS数据集的构建主要基于HeLiPR数据集的KAIST05序列,该数据集由四种不同的LiDAR传感器采集,包括两种机械式全方位LiDAR传感器和两种固态LiDAR传感器。为了同步这些传感器的点云数据,首先将它们转换到Ouster传感器的坐标系中。然后,通过一个新颖的自动标注框架生成初步的MOS标签,该框架结合了实例感知静态地图构建方法和基于跟踪的错误标签过滤。最后,在人工监督下对标签进行手动校正,并将校正后的标签反向传播到各个传感器的点云中。
特点
HeLiMOS数据集的特点在于其异构性,它包含了四种不同类型的LiDAR传感器采集的点云数据。这使得数据集能够支持对MOS算法在异构LiDAR传感器配置上的泛化能力进行评估。此外,数据集的动态点比例显著高于现有的MOS数据集,这意味着它能够更好地模拟真实世界的动态场景。数据集还提供了大量的实例感知MOS标签,这些标签可以帮助研究人员评估算法在处理不同动态点模式和传感器类型时的性能。
使用方法
HeLiMOS数据集的使用方法包括三个主要步骤:同步、自动标注和人工校正。首先,将不同传感器的点云数据同步到统一的坐标系中。然后,使用自动标注框架生成初步的MOS标签。最后,在人工监督下对这些标签进行校正,以确保其准确性。校正后的标签可以用于训练和评估MOS算法。数据集的结构遵循SemanticKITTI格式,以便于与现有的SemanticKITTI数据加载器兼容。
背景与挑战
背景概述
随着自动驾驶汽车和机器人技术的快速发展,对周围环境进行准确理解的需求日益增长。移动目标分割(MOS)作为场景理解和识别移动目标的关键技术,在3D激光雷达传感器的应用中尤为重要。然而,尽管市场上存在着各种类型的3D激光雷达传感器,但MOS研究主要集中在对机械旋转全向激光雷达传感器产生的3D点云的处理上。因此,对于具有不规则扫描模式的固态激光雷达传感器,我们缺乏具有MOS标签的数据集。本文中,我们提出了一个名为HeLiMOS的标记数据集,它可以在四个异构激光雷达传感器上测试MOS方法,包括两种固态激光雷达传感器。此外,我们引入了一种新颖的自动标记方法,以大幅减少人工标注者所需的标注工作量。为此,我们的框架利用了实例感知静态地图构建方法和基于跟踪的错误标签过滤。最后,我们提供了关于常用最先进MOS方法在HeLiMOS上的性能的实验结果,这表明了传感器无关的MOS的新方向,即无论用于捕获3D点云的激光雷达传感器的类型如何,都能正常工作。我们的数据集可在https://sites.google.com/view/helimos获取。
当前挑战
HeLiMOS数据集面临的主要挑战包括:1) 所解决的领域问题是移动目标分割,特别是在异构激光雷达传感器设置下的点云分割;2) 构建过程中遇到的挑战,例如如何有效地同步来自不同类型传感器的点云数据,以及如何设计一个高效且准确的自动标注框架以减少人工标注的工作量。这些挑战对于确保数据集的质量和实用性至关重要,并且对于推动MOS技术的发展具有重要意义。
常用场景
经典使用场景
HeLiMOS数据集是一个用于在3D点云中分割运动物体的数据集,它涵盖了四种不同类型的LiDAR传感器,包括两种固态LiDAR传感器。这使得HeLiMOS成为评估和测试不同类型LiDAR传感器上的运动物体分割方法的重要工具。该数据集的一个经典使用场景是在自动驾驶汽车领域,用于帮助车辆在复杂的交通环境中识别和分割运动物体,从而提高路径规划和避障的安全性。
实际应用
HeLiMOS数据集在实际应用场景中具有广泛的应用前景,特别是在自动驾驶汽车领域。该数据集可以帮助自动驾驶汽车在复杂的交通环境中识别和分割运动物体,从而提高路径规划和避障的安全性。此外,HeLiMOS数据集还可以用于其他需要运动物体分割的应用场景,例如机器人导航、无人机监控等。
衍生相关工作
HeLiMOS数据集的提出也衍生了许多相关的经典工作。例如,基于HeLiMOS数据集的研究人员提出了新的运动物体分割方法,这些方法可以有效地分割不同类型LiDAR传感器上的运动物体。此外,基于HeLiMOS数据集的研究人员还提出了新的自动标注框架,可以大大减少人工标注的工作量。这些相关工作进一步推动了运动物体分割领域的研究和发展。
以上内容由遇见数据集搜集并总结生成


