DReSS-D
收藏arXiv2025-08-07 更新2025-08-09 收录
下载链接:
https://github.com/bnothing/Slice-Loc
下载链接
链接失效反馈官方服务:
资源简介:
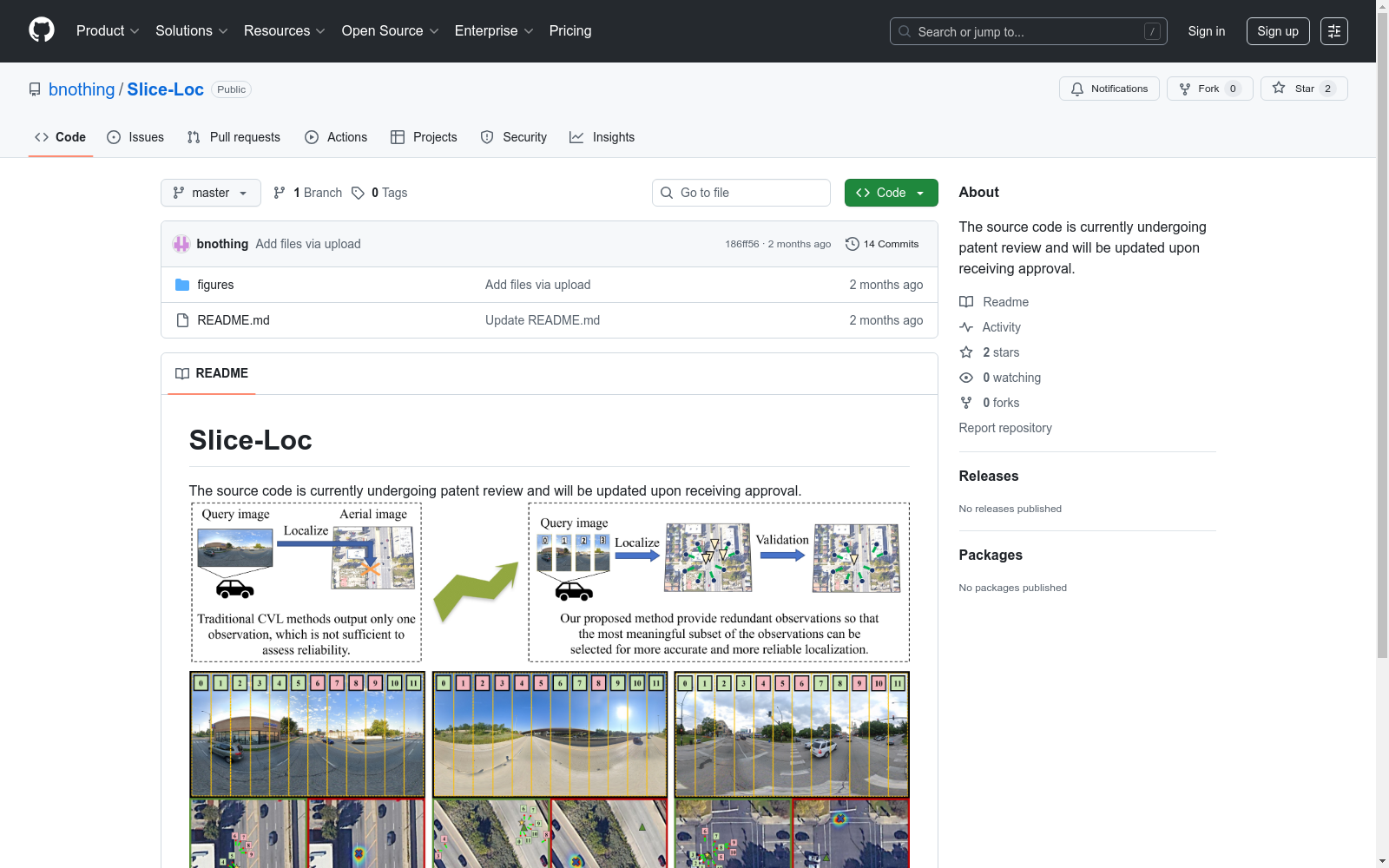
DReSS-D是一个细粒度的地理标记CVL数据集,提供了像素级地面真实标签,用于训练模型。每个地面全景图像都与一个深度图配对,使得查询图像中的每个像素都可以投影到参考图像空间。DReSS-D是第一个提供像素级对应关系的学术交叉视图数据集,可以实现比传统相机姿态数据集更密集的监督。该数据集旨在解决交叉视图定位中的高精度和高可靠性问题,特别是在复杂场景中。数据集的具体大小和Tokens数未在论文中明确提及。
DReSS-D is a fine-grained geotagged CVL dataset that provides pixel-level ground truth labels for model training. Each ground panoramic image is paired with a depth map, enabling every pixel in the query image to be projected into the reference image space. As the first academic cross-view dataset offering pixel-level correspondences, DReSS-D enables denser supervision than traditional camera pose datasets. This dataset aims to address the challenges of high accuracy and reliability in cross-view localization, especially in complex scenarios. The specific size and token count of the dataset are not explicitly mentioned in the paper.
提供机构:
武汉大学遥感信息工程学院
创建时间:
2025-08-07
搜集汇总
数据集介绍
构建方式
DReSS-D数据集的构建基于DReSS数据集,扩展了六座城市(悉尼、芝加哥、约翰内斯堡、东京、里约和伦敦)的地面与航空图像,覆盖面积超过400平方公里。通过Google Street View Static API获取360度深度图像,生成每个地面全景图像的深度图,从而建立像素级的地面与卫星图像对应关系。该数据集首次在学术领域提供了像素级的地面与卫星图像对应关系,为训练模型提供了密集的监督信号。
特点
DReSS-D数据集的特点在于其多样性和密集的监督信号。数据集覆盖了六座不同大洲的城市,提供了丰富的场景变化。每个地面全景图像配有深度图,使得每个像素可以投影到参考图像空间,实现了像素级的一对一对应关系。此外,参考图像为经过几何处理的正射影像图,具有RGB通道,分辨率为0.11米,大小为1280×1280像素。
使用方法
DReSS-D数据集的使用方法包括两个主要阶段:训练和测试。在训练阶段,利用深度图生成地面图像的3D点云,并将其投影到参考图像空间,以获取场景位置的监督信号。在测试阶段,通过对比地面查询图像与参考图像的视觉特征,进行跨视图的精细定位。该数据集特别适用于需要密集监督的跨视图定位任务,如自动驾驶和灾害地图绘制。
背景与挑战
背景概述
DReSS-D数据集由武汉大学的研究团队于2025年提出,旨在解决跨视角地理定位(CVL)中的精细定位问题。该数据集基于DReSS数据集扩展,新增了深度图信息,提供了像素级的对应关系,支持从地面全景图像到卫星图像的精确投影。DReSS-D覆盖了六大洲六个城市的多样化场景,包括悉尼、芝加哥、约翰内斯堡、东京、里约和伦敦,每个城市的图像分布均匀,覆盖面积超过400平方公里。该数据集的核心研究问题是实现地面相机在GNSS拒止环境下的离线自定位,通过冗余切片观测和几何一致性验证提升定位的准确性和可靠性。DReSS-D的推出为跨视角地理定位领域提供了首个像素级监督的学术数据集,推动了密集监督和几何验证方法的发展。
当前挑战
DReSS-D数据集面临的挑战主要包括两方面:领域问题的挑战和构建过程的挑战。在领域问题方面,跨视角地理定位需要克服地面图像与卫星图像之间视角、成像模态和时间差异大的问题,这导致特征描述符的鲁棒性不足,定位精度受限。此外,现有方法缺乏冗余观测和可靠性评估机制,难以通过几何一致性检测定位失败。在构建过程方面,数据集的创建需要处理大规模地理覆盖和多样化场景的复杂性,包括获取高精度深度图、确保像素级对应关系的准确性,以及解决跨城市场景的泛化问题。这些挑战需要通过创新的数据采集方法和几何验证算法来应对。
常用场景
经典使用场景
DReSS-D数据集在跨视角定位(CVL)研究中扮演着关键角色,主要用于解决地面图像与航拍图像之间的精准匹配问题。该数据集通过提供地面全景图像与高分辨率航拍图像的像素级对应关系,支持了从粗到精的多阶段定位流程。经典使用场景包括智能车辆在GNSS拒止环境下的自主定位,以及无人机在复杂城市环境中的精确导航。数据集通过冗余切片观测和几何一致性验证,显著提升了定位的准确性和可靠性。
衍生相关工作
围绕DReSS-D数据集衍生的经典工作包括:基于切片观测的冗余定位框架Slice-Loc、反证验证模型OSA-CVL,以及跨视图特征转换网络C-BEV。这些工作共同推动了CVL领域从单一姿态输出向多观测验证的范式转变。其中Slice-Loc方法被扩展应用于卫星-无人机跨视角定位,而数据集提供的深度信息则启发了后续如MegaDepth等稠密匹配研究,形成了从粗定位到细粒度重建的技术链条。
数据集最近研究
最新研究方向
近年来,DReSS-D数据集在跨视角地理定位(CVL)领域的研究取得了显著进展。该数据集通过提供地面全景图像与卫星图像之间的像素级对应关系,为训练模型提供了更密集的监督信号。前沿研究方向主要集中在利用深度学习方法提升跨视角匹配的精度和鲁棒性,特别是在复杂城市环境和对称布局场景中的定位性能。热点事件包括引入冗余观测和几何一致性验证机制,如Slice-Loc方法通过切片图像生成冗余观测,并结合a-contrario理论进行可靠性评估,显著降低了定位误差。这一进展对自动驾驶、灾害测绘等应用具有重要意义,推动了跨视角地理定位技术在实际场景中的可靠性和实用性。
相关研究论文
- 1Cross-View Localization via Redundant Sliced Observations and A-Contrario Validation武汉大学遥感信息工程学院 · 2025年
以上内容由遇见数据集搜集并总结生成



{kind=link}
{kind=link}