hssd/hssd-hab
收藏Hugging Face2025-02-14 更新2024-03-04 收录
下载链接:
https://hf-mirror.com/datasets/hssd/hssd-hab
下载链接
链接失效反馈官方服务:
资源简介:
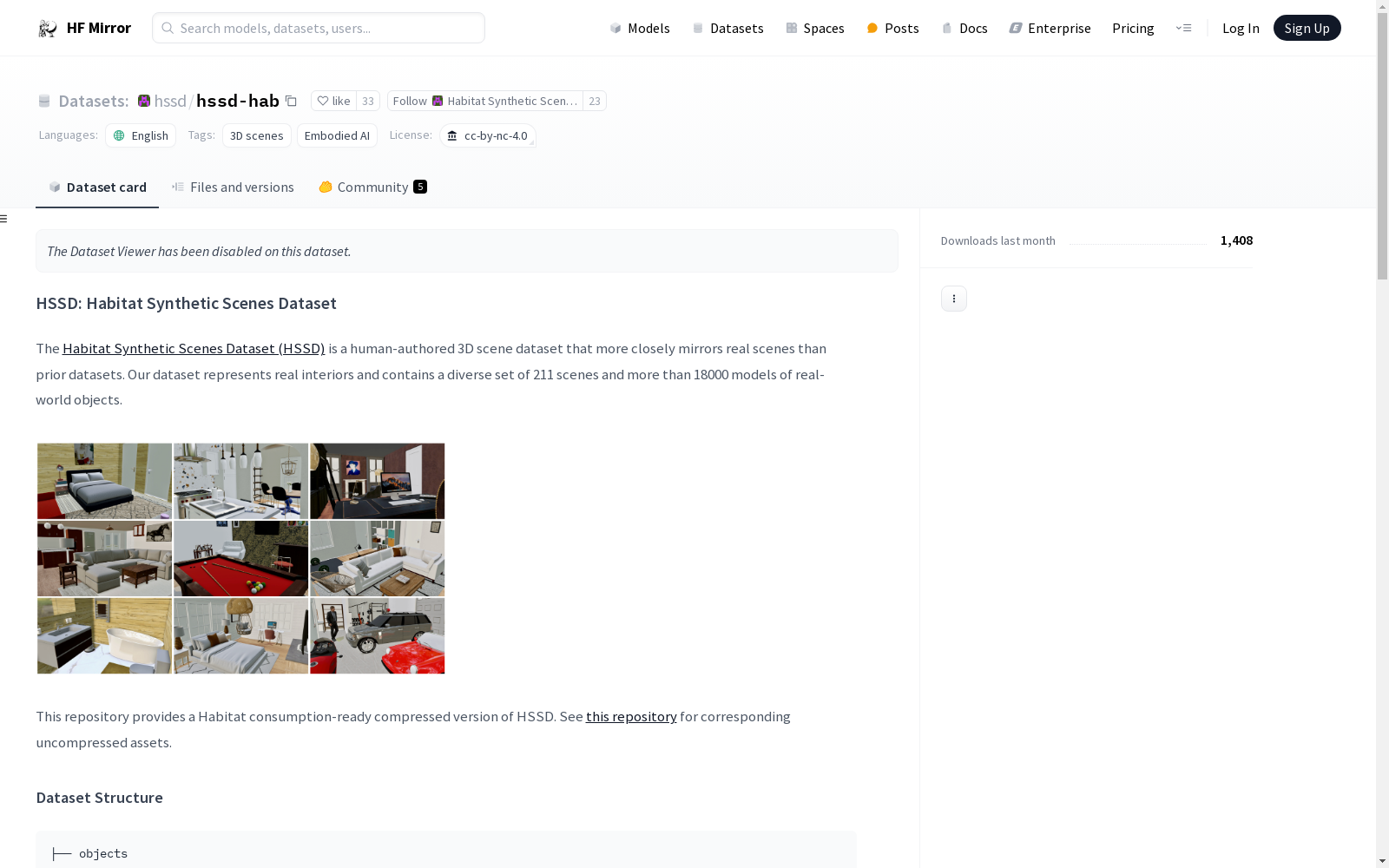
Habitat合成场景数据集(HSSD)是一个人工创建的3D场景数据集,旨在更真实地模拟现实场景。该数据集包含211个场景和超过18000个真实世界物体的模型,涵盖了多样化的室内环境。数据集结构包括对象、舞台、场景等文件夹,每个文件夹包含相应的3D模型和配置文件。此外,数据集还支持Habitat 3.0的重新排列任务,提供了更新的碰撞器、调整和去杂乱的场景内容、接收器网格和接收器过滤器文件。
Habitat Synthetic Scene Dataset (HSSD) is an artificially created 3D scene dataset designed to more realistically simulate real-world scenarios. This dataset contains 211 scenes and over 18,000 real-world object models, covering diverse indoor environments. The dataset's structure includes folders such as Objects, Stages, and Scenes, with each folder containing corresponding 3D models and configuration files. Additionally, this dataset supports the Rearrangement Task in Habitat 3.0, providing updated colliders, adjusted and clutter-removed scene content, receiver meshes, and receiver filter files.
提供机构:
hssd
原始信息汇总
HSSD数据集概述
数据集基本信息
- 名称: Habitat Synthetic Scenes Dataset (HSSD)
- 类型: 3D场景数据集
- 描述: HSSD是一个由人类作者创建的3D场景数据集,更接近真实场景。包含211个场景和超过18000个真实世界对象模型。
- 许可证: CC BY-NC 4.0
数据集结构
├── objects │ ├── /.glb │ ├── /.collider.glb │ ├── /.filteredSupportSurface(.ply|.glb) │ ├── /.object_config.json ├── stages │ ├── *.glb │ ├── *.stage_config.json ├── scenes │ ├── *.scene_instance.json ├── scenes_uncluttered │ ├── *.scene_instance.json ├── scene_filter_files │ ├── *.rec_filter.json └── hssd-hab.scene_dataset_config.json └── hssd-hab-uncluttered.scene_dataset_config.json
主要组成部分
- objects: 包含用于构建场景的独立对象的3D模型,包括配置文件、渲染资产、碰撞器资产和接收器网格资产。
- stages: 在Habitat中,一个阶段是构成场景背景的静态网格组件集合(例如地板、墙壁、楼梯等)。
- scenes: 一个场景是由静态阶段和可变数量的对象组成的单个3D世界。
支持的资产
- hssd-hab-uncluttered.scene_dataset_config.json: 该SceneDataset配置文件聚合了调整后的非杂乱场景,用于重新排列任务。
- scenes_uncluttered: 包含调整后的场景实例配置文件。
- scene_filter_files: 场景过滤文件根据模拟启发式和手动编辑将场景中的可用接收器实例分为活动和非活动组,由RearrangeEpisodeGenerator用于构建有效的RearrangeEpisodeDatasets。
版本更新
- v0.2.5: 添加了描述小对象支持表面的接收器网格,添加了支持模拟的碰撞器网格,添加了用于实体重新排列任务的调整和非杂乱场景,以及用于RearrangeEpisode生成的场景过滤文件。
- v0.2.4: 重新压缩了多个对象GLB以保留PBR材料状态,添加了对象元数据和语义词汇表文件,以及训练/验证场景分割文件。
- v0.2.3: 首次发布。
搜集汇总
数据集介绍
构建方式
HSSD数据集通过人工构建的方式,精心设计了一系列逼真的3D室内场景,涵盖了211个场景和超过18000个真实世界物体的模型。数据集的结构包括对象、场景、舞台等多个层次,每个层次都配备了详细的配置文件和支持文件,以确保数据的高质量和易用性。此外,数据集还特别为Habitat 3.0的重新排列任务进行了优化,提供了去杂乱场景和支持表面的网格文件。
特点
HSSD数据集以其高度逼真的3D场景和丰富的物体模型著称,特别适合用于具身智能体的训练和测试。数据集中的每个场景都经过精心设计,以模拟真实世界的室内环境,同时提供了详细的配置文件和网格文件,支持复杂的仿真任务。此外,数据集还包含了去杂乱场景和重新排列任务所需的特殊配置,使其在具身AI领域具有广泛的应用潜力。
使用方法
使用HSSD数据集时,首先需要安装Habitat-Sim和Habitat-Lab,这两个工具分别用于场景的加载和具身AI任务的执行。通过Habitat-Sim的交互式查看器,用户可以加载并浏览数据集中的场景。对于具身AI任务的定义、训练和性能评估,Habitat-Lab提供了高层次的模块化支持。用户可以根据具体任务需求,选择合适的场景和配置,进行实验和测试。
背景与挑战
背景概述
Habitat Synthetic Scenes Dataset (HSSD) 是由3DLG-HCVC团队开发的一个高质量3D场景数据集,旨在为具身智能(Embodied AI)研究提供更贴近真实环境的虚拟场景。该数据集于2022年首次发布,包含211个精心设计的室内场景和超过18000个真实世界物体的3D模型。HSSD的核心研究问题在于如何通过高保真的虚拟环境模拟真实世界的复杂性,从而支持智能体在虚拟空间中的导航、物体重排等任务。该数据集在具身智能领域具有重要影响力,为研究者提供了一个标准化的测试平台,推动了智能体在复杂环境中的学习和适应能力。
当前挑战
HSSD数据集在构建和应用过程中面临多重挑战。首先,如何确保3D场景的高保真度和多样性是一个关键问题,这要求数据集在物体建模、材质渲染和场景布局上达到极高的精度。其次,数据集的设计需要支持复杂的具身智能任务,如物体重排和导航,这对场景的物理属性和交互逻辑提出了更高要求。此外,数据集的构建过程中还面临技术挑战,例如如何高效压缩和存储大规模3D模型,以及如何优化场景加载和渲染性能以适应实时模拟需求。这些挑战不仅影响了数据集的构建效率,也对后续的研究应用提出了更高的技术要求。
常用场景
经典使用场景
HSSD数据集在3D场景重建和具身智能(Embodied AI)领域具有广泛的应用。其经典使用场景包括在Habitat模拟器中加载和渲染高度逼真的室内场景,用于训练和测试智能体在复杂环境中的导航、物体重排等任务。通过提供多样化的场景和物体模型,HSSD能够支持研究人员在虚拟环境中模拟真实世界的交互,从而提升智能体的环境适应能力。
实际应用
HSSD数据集的实际应用场景主要集中在智能家居、服务机器人以及虚拟现实领域。例如,在智能家居中,HSSD可以用于训练服务机器人在复杂室内环境中执行物体搬运、整理等任务。在虚拟现实领域,HSSD的高质量3D场景能够为沉浸式体验提供逼真的环境支持。此外,HSSD还可用于自动驾驶模拟器中,帮助开发车辆在复杂城市环境中的导航能力。
衍生相关工作
HSSD数据集推动了具身智能领域的多项经典研究工作。基于HSSD,研究人员开发了多种智能体训练框架,如Habitat-Lab,用于导航、物体重排和指令跟随等任务。此外,HSSD还为场景理解、物体识别和多模态感知等研究提供了丰富的数据支持。相关研究不仅提升了智能体在虚拟环境中的表现,还为真实世界中的机器人应用奠定了技术基础。
以上内容由遇见数据集搜集并总结生成


